工业机器人拆卸能力评估及可视化系统设计与实现开题报告
2020-02-18 19:31:00
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
可持续发展是指既满足当代人的需求,又不损害后代人满足需要的能力的发展。即经济、社会、资源和环境保护协调发展,它们是一个密不可分的系统,既要达到发展经济的目的,又要保护好人类赖以生存的大气、淡水、海洋、土地和森林等自然资源和环境。可持续发展的核心是发展,但要求在严格控制人口、提高人口素质和保护环境、资源永续利用的前提下进行经济和社会的发展。可持续发展是当今社会发展的主题,同样的制造领域的可持续性也越发重要。
2. 研究的基本内容与方案
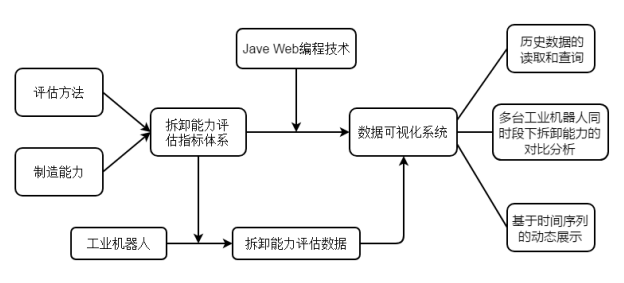
本文旨在通过归纳分析可持续制造环境下与工业机器人拆卸能力相关的指标,从而建立全面的评估指标体系,进而通过合适的方法对工业机器人进行拆卸能力评估。在此基础上,通过设计一个web数据可视化系统,将工业机器人拆卸能力评估数据进行基于时间序列的动态展示,同时,系统应要满足拆卸能力历史数据的读取和查询,以及多台工业机器人同时段下拆卸能力的对比分析。
在这个进度安排之下,首先是要收集并理解有关制造能力和评估方法相关的理论知识,并以此为基础建立全面的工业机器人拆卸能力的评估指标体系。其次是要利用java web编程技术实现其评估体系的数据可视化,将工业机器人经由评估指标体系所得出的拆卸能力评估数据通过可视化系统以时间序列展示,并且使可视化系统拥有的功能能够满足包括历史数据的查询,读取,以及当有多台机器人在同时段下经评估的拆卸能力数据的对比分析,而要进一步实现这些功能与要求则需要更进一步的掌握javascript、css、html5等网页前端技术并努力熟悉struts、spring、hibernate等java web编程框架。
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,学习毕业设计研究内容所需理论的基础。确定毕业设计方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文文献的翻译。
第6-9周:熟悉相关评估方法及相应软件,完成拆卸能力的评估,并搭建系统开发环境。
第10-12周:针对设计任务进行系统设计与实现。
第13-15周:系统测试,完成并修改毕业论文。
第16周:论文答辩。
4. 参考文献(12篇以上)
[1] h. zhang, k. r. haapala. integrating sustainable manufacturing assessment into decision making for a production work cell. journal of cleaner production, 2015, 105: 52-63.
[2] x. zhou, p. jiang, x. zhou. sensitivity analysis-based dynamic process capability evaluation for small batch production runs. proceedings of the institution of mechanical engineers part b - journal of engineering manufacture, 2016. doi: 10.1177/0954405416645999
[3] l. xie l, x. jiang, w. xu, q. wei, r. li, z. zhou. dynamic assessment of sustainable manufacturing capability for cnc machining systems in cloud manufacturing. in: ifip international conference on advances in production management systems, springer international publishing, 2015: 396-403.
[4] 杜彦斌, 曹华军, 刘飞. 基于熵权与层次分析法的机床再制造方案综合评价. 计算机集成制造系统, 2011, 17(1).
[5] 石旭东, 李健丽, 王立文. 基于模糊层次分析的动态联盟设备选择方法研究. 组合机床与自动化加工技术, 2007(4):34-37.
[6] tian g, liu y, tian q, et al. evaluation model and algorithm of product disassembly processwith stochastic feature[j]. clean technologies and environmental policy, 2012,14(2):345-356.
[7] zhu b, sarigecili m i, roy u. disassembly information model incorporating dynamiccapabilities for disassembly sequence generation[j]. robotics and computer-integratedmanufacturing, 2013, 29(5):396-409.



