高精度三轴运动平台设计及控制毕业论文
2020-05-26 20:47:17
摘 要
运动平台现在广泛应用在包括航天、医疗、机械加工、机器人技术等领域,随着加工技术的不断革新,人们对产品的需求在变化,这就决定了未来的制造向高精度、稳定性好高方向发展。多轴联动控制与许多方面相关的,例如曲轴加工、机械缠绕问题还有和数控机床等设备相关。系统可靠性还有控制精度的影响因素有很多,其中最直接的因素就是几台电机之间的协调的能力的好坏。因此,实现三轴运动平台的高精度运转对生产、生活有很多意义。
本课题是要实现三轴运动平台的总体结构设计及系统控制,需要绘制出相应的模型并实现控制,使设计结果得到最直接的体现。通过设计,可以实现精通相应的软件,并且能够准确的画出三维图,并且完成最后的二维总装图。需要知道如果要使三轴运动平台实现多轴联动的关键点在哪。在做毕业论文的过程中,能够培养我们的问题的分析解决能力,还有能够自己独立工作的能力,把我们之前所学过的知识进一步的加深加强。
关键词:三轴运动平台 系统控制 结构的设计
Design and control of high precision three axis motion platform
Abstract
Motion Platform is now widely used in the fields including aerospace, medical, machining, robotics, with the innovative processing technology, the demand for products changing, which determines the future of manufacturing to high-precision, high stability direction. Multi-axis control with a number of related aspects, such as crankshafts, mechanical winding problem there and CNC machine tools and other related equipment. System reliability as well as precision control factors, many of them the most direct factor is the ability to coordinate several motors between good and bad. Therefore, to achieve high-precision three-axis motion platform running on the production and life have a lot of significance.
The issue is to achieve the overall design and system control three-axis motion platform, it is necessary to draw the corresponding model and to achieve control, so that the design results obtained most direct expression. By design, it can achieve proficiency in the appropriate software, and can accurately draw a three-dimensional map, and complete the final assembly of a two-dimensional diagram. If you need to know the key points to make three-axis motion platform in which multi-axis. In doing thesis process, we can cultivate our ability to analyze and solve problems, as well as their own ability to work independently, to further deepen our previously learned knowledge to strengthen.
Keywords: three axis motion platform system control structure Design
目录
摘 要 I
Abstract II
第一章 绪论 1
1.1机器人介绍 1
1.2机器人的组成部分 1
1.3运动平台的驱动机构 2
1.3.1 直线驱动技术 3
1.3.2 高精度运动平台的驱动结构 3
1.3.3 微位移机构 3
1.4驱动系统控制技术的分类 3
1.4.1 以反馈形式分类 3
1.5本课题的研究目的及意义 4
1.5.1 本课题研究的目的 4
1.5.2 本课题研究的意义 4
第二章 三轴运动平台的总体设计 6
2.1自由度的简介 6
2.2运动平台设计概述 6
2.3运动平台的设计要求 7
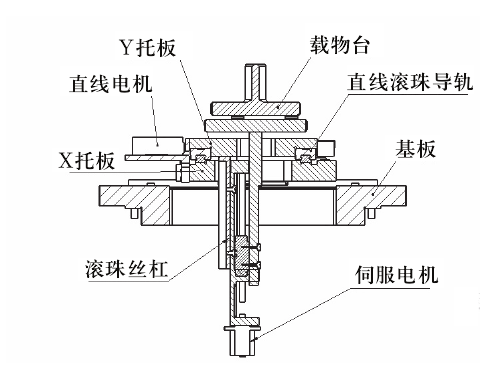
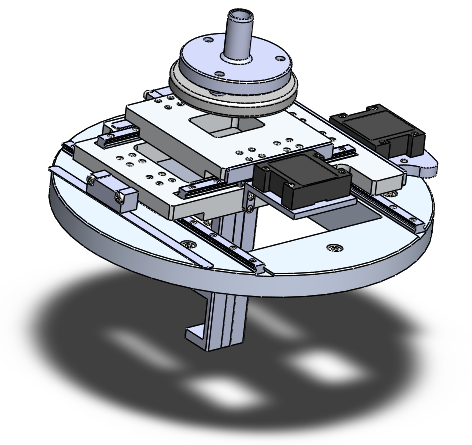
2.4运动平台的结构设计 7
2.5驱动系统的设计 8
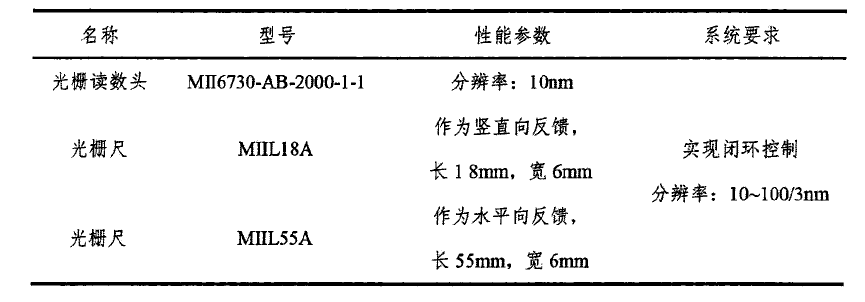
2.6选择位移测量方式 8
第三章 三轴运动平台各部分机械装置设计 10
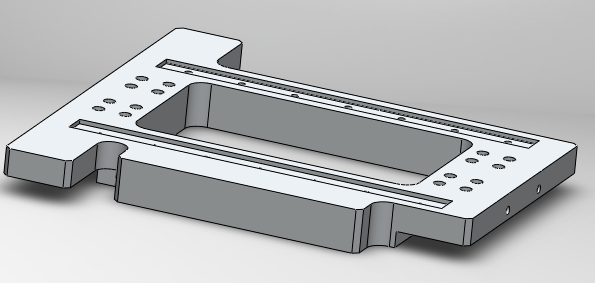
3.1三轴运动平台的设计 10
3.1.1 X轴上运动平台设计 10
3.1.2 Y轴上运动平台设计 10
3.1.3 Z轴上运动平台设计 11
3.2直线滚珠导轨的设计 12
3.2.1 材料选择 12
3.2.2 结构设计 12
3.3其它各机械部件设计 13
第四章 运动平台的控制设计 16
4.1控制系统总体概述 16
4.2驱动电机的工作原理及控制原理 16
4.2.1 驱动电机的工作原理 16
4.2.2 驱动电机的控制原理 17
4.3控制卡和驱动器的连接 17
第五章 三轴运动平台实验的测试结果及分析 20
5.1误差理论分析 20
5.2误差的测量及结果分析 22
5.3误差补偿 23
第六章 总结 25
参考文献 26
致谢 28
第一章 绪论
1.1机器人介绍
机器人指的就是它能够自己执行工作的一种装置[1]。机器人它不仅仅可以接受人类的指挥,而且还能够运行已经编好的程序,并且它采用的人工智能技术能让它参照原则纲领工作。它可以协助人类工作甚至可以取代人类的工作,并且在生产行业,建筑行业甚至是某些危险的场合也能够见到它的身影[2]。
机器人包括控制器部分、机械本体部分、驱动系统部分以及检测传感装置部分。它不仅仅能够提高产品的质量、产品的生产效率还能够改善劳动条件。并且在产品的更新换代中也起着举足轻重的作用。
1.2机器人的组成部分
机器人的工作原理[3]是一个比较复杂的问题,简单地说,机器人的原理是模仿人的各种肢体动作、思维方式和控制决策能力。
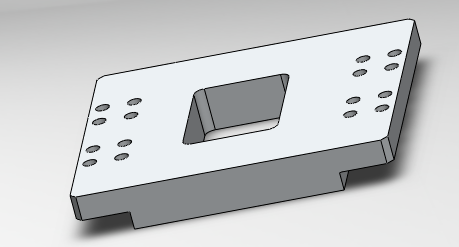
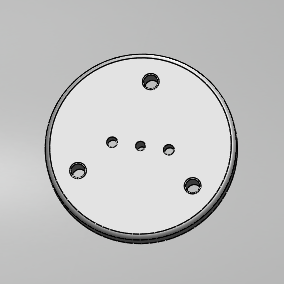
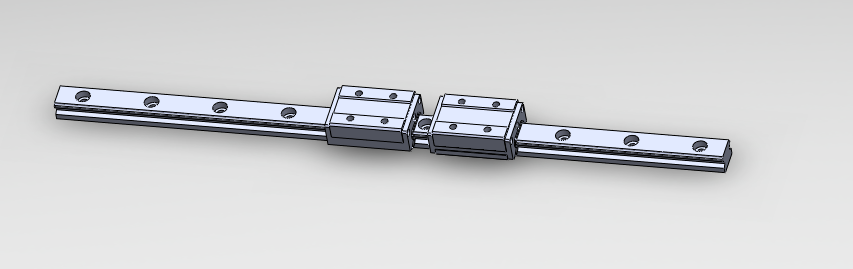
相关图片展示: