一种内置式永磁同步电机无位置传感器低速控制策略毕业论文
2020-02-18 11:06:23
摘 要
永磁同步电机(PMSM)具有效率高、功率密度大、功率因数高和动态性能好等优势,在工业驱动领域有着广阔的市场前景。根据转子永磁体结构,永磁同步电机有内置式(IPMSM)和表面式( SPMSM)。永磁同步电机与表面式永磁同步电机比较,永磁同步电机拥有更好的过载能力,更高功率密度和更宽的速度范围。在永磁同步电机的矢量控制过程中,传统的方法是利用位置传感器获取转子位置信息,但位置传感器的使用增加了产品的体积和成本,可靠性低。因此低成本鲁棒强的控制方法成为了新的研究课题。
首先,本文介绍了无位置传感器永磁同步电机的矢量控制方法,详细描述了传统高频注入法及改进后的注入法,改善传统高频注入法需要使用滤波器的缺点。滤波器设计复杂,限制电流环带宽,导致驱动性能差,造成信号延迟,以致转子信息估计不准确。
接着,我们采用电压矢量注入法,实现控制周期和注入周期分离,不需要使用滤波器,避免了使用滤波器而导致的不足,但是这种方法仍存在逆变器误差。
最后对基于正反电压信号注入的无位置传感器低速观测器进行理论建模和仿真,由仿真得到的波形可知该方案动态性能好,稳定性和精确度高。
关键词:矢量控制;永磁同步电机;,低速控制
Abstract
Permanent magnet synchronous motor(PMSM) has the advantages of high efficiency,large power density,high power factor and good dynamic performance,has a broad market prospects in the field of industrial drive.According to the rotor permanent magnet structure,the permanent magnet synchronous motor has built-in(IPMSM) and surface-type(SPMSM).IPMSM comparison with SPMSM,IPMSM has better overload capability,higher power density and wider speed range.In the process of vector control of Permanent magnet synchronous motor,the traditional method is to obtain rotor position information by using position sensor,but the use of position sensor increases the volume and cost of the product and has low reliability.Therefore,the low cost robustness control method has become a new research topic.
Firstly,this paper introduces the vector control method of the IPMSM sensor,and describes
In detail the traditional high frequency injection method and the improved injection method to improve the shortcomings of the traditional high frequency injection method,which requires the use of filters.The filter design is complex,limits the current loop bandwidth,causes the driving performance to be poor,causes the signal delay,so that the rotor information estimation is inaccurate.
Then,we use voltage vector injection method to realize the separation of control period and injection period,do not need to use filter,avoid the shortage caused by the use of filter,but there is still inverter error in this method.
Finally,the theoretical modeling and simulation of the non-position sensor low-speed observer based on positive and negative voltage signal injection are carried out,and the waveform obtained by simulation shows that the scheme has good dynamic performance,high stability and accuracy.
Keyword:vector control;permanent magnet synchronous motor;low-speed control
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究背景和意义 1
1.2 永磁同步电机发展概况 1
1.3 减少滤波环节研究现状 2
1.4 逆变器非线性补偿研究现状 3
1.5 主要研究内容 3
第2章 永磁同步电机的数学模型 5
2.1 ABC坐标系数学模型 5
2.2 坐标变换的原理 7
2.3 α-β静止坐标系下的数学模型 8
2.4 同步旋转坐标系下的数学模型 9
2.5 本章小结 10
第3章 永磁同步电机矢量控制 11
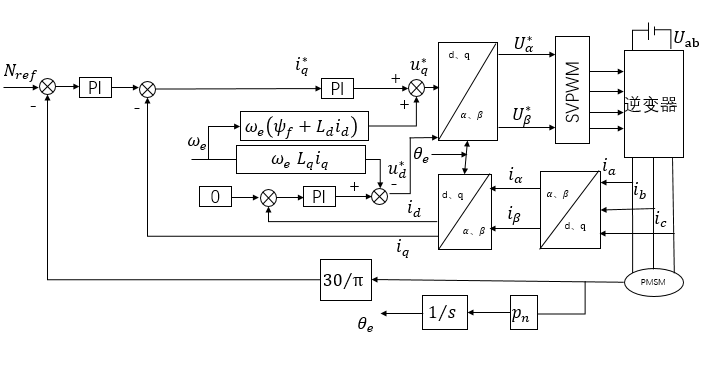
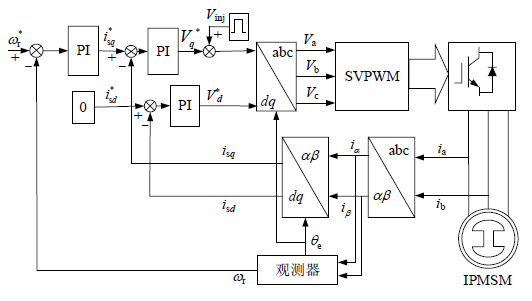
3.1永磁同步电机矢量控制系统结构框图 11
3.2永磁同步电动机原理 11
3.2.1永磁同步电机的优点 12
3.2.2 内置式永磁同步电机选用 12
3.3矢量控制原理 13
3.3.1 滞环电流控制 13
3.3.2 PI电流控制 13
3.4 SVPWM 14
3.5 Park变换、Park反变换和Clark变换 14
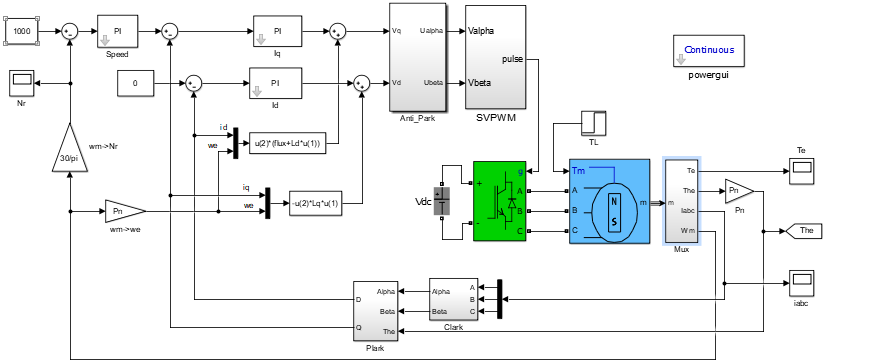
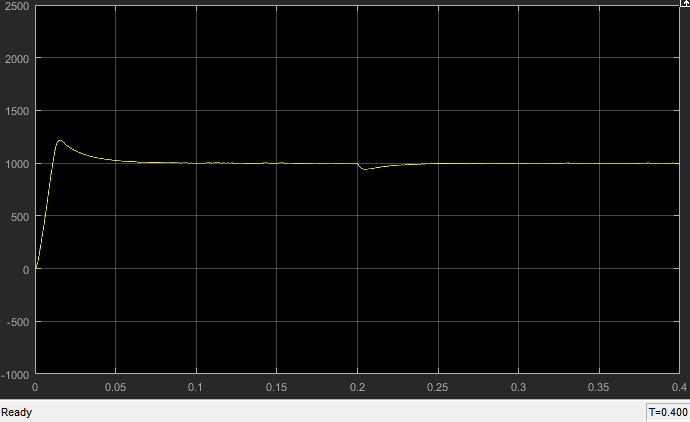
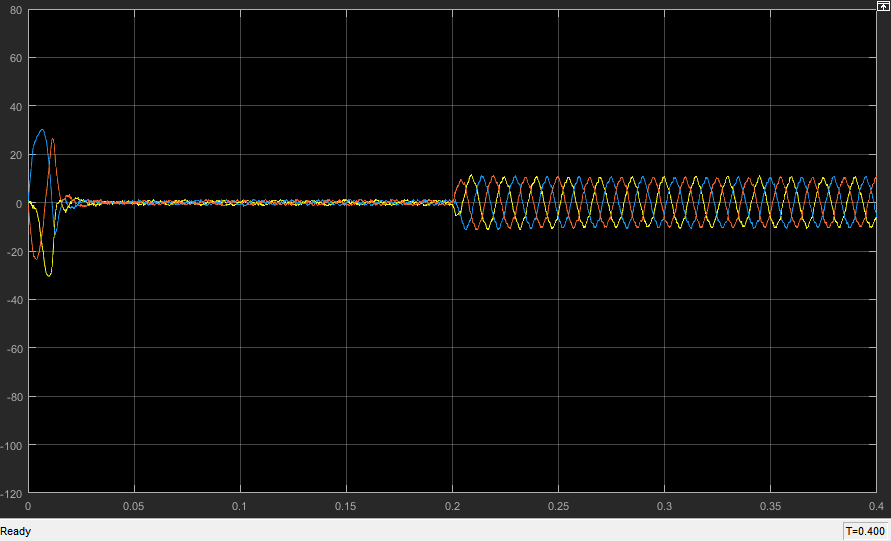
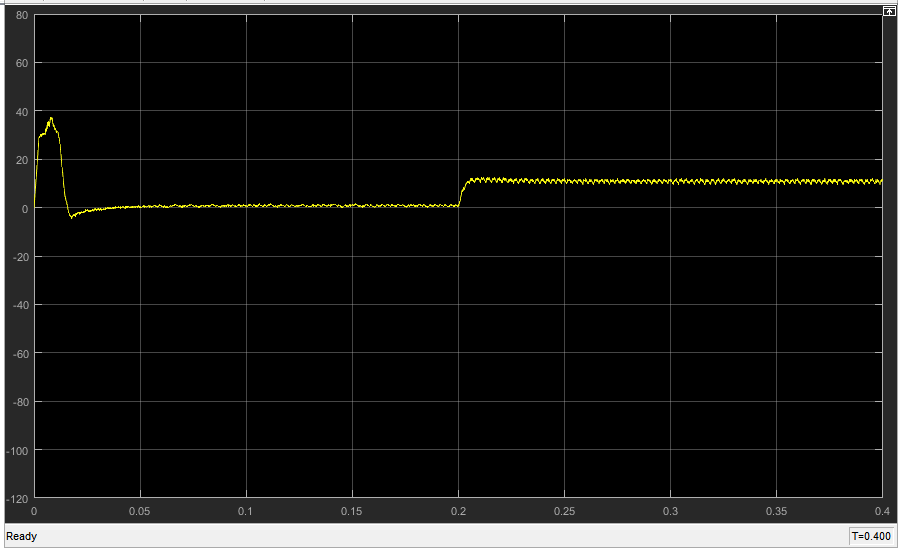
3.6系统建模和仿真 15
3.7本章小结 18
第4章 高频方波注入法 19
4.1传统高频注入法原理 19
4.2 基于dq轴电压信号注入法 20
4.3 电压矢量注入法 21
4.4 基于逆变器电压误差补偿后的注入方法 21
4.5 系统建模与仿真 22
4.6 本章小结 24
第5章 总结及展望 25
5.1 总结 25
5.2 展望 25
参考文献 26
致 谢 28
第1章 绪论
1.1 研究背景和意义
永磁同步电机低速控制在采用位置传感器获取转子位置时,系统体积较大,且成本高,维护性差,使系统可靠性低。因此采用无位置传感器成为解决这些问题的研究方向,朱瑞杰和吴亭宽等人采用的无位置传感器的基波激励法很难在低速条件下检测转子位置 。旋转高频注入法,脉振高频注入法等基于无位置传感器的高频注入法相继被提出,而高频注入法仍然有缺陷
。旋转高频注入法,脉振高频注入法等基于无位置传感器的高频注入法相继被提出,而高频注入法仍然有缺陷 。随着多种低速永磁同步电机转子位置估计方法相继被提出,其中低速高频注入法滤波环节对系统动态性能的限制、逆变器存在电压误差导致补偿方式精确性不高,同时还引入了新的误差等问题
。随着多种低速永磁同步电机转子位置估计方法相继被提出,其中低速高频注入法滤波环节对系统动态性能的限制、逆变器存在电压误差导致补偿方式精确性不高,同时还引入了新的误差等问题 。针对以上问题,永磁同步电机无位置传感器系统低速控制策略的研究提上了日程,成为了转子位置估计新的突破口。
。针对以上问题,永磁同步电机无位置传感器系统低速控制策略的研究提上了日程,成为了转子位置估计新的突破口。
如果使用传统高频注入法,内置式永磁同步电机矢量控制有许多缺陷。 一方面在基于高频注入的内置式永磁同步电机无位置传感器低速控制中,通常采取滤波器获取转子位置信息和反馈电流环基频分量的方式,但滤波器会导致信号延迟产生位置误差,影响速度估计的准确度,限制电流环带宽,降低驱动性能。另一方面,为了让观测位置准确,补偿逆变器电压误差尤为重要,但是在数字控制系统中,存在切换周期的延迟,导致先计算后补偿的方法效果不佳 。为了解决以上两个问题,设计出一种基于dq轴电压信号注入的转子位置观测方法。通过磁场定向控制(Field Oriented Controller,FOC)周期和电压信号注入周期交替进行,达到了两个周期之间的隔离,省去了滤波环节。
。为了解决以上两个问题,设计出一种基于dq轴电压信号注入的转子位置观测方法。通过磁场定向控制(Field Oriented Controller,FOC)周期和电压信号注入周期交替进行,达到了两个周期之间的隔离,省去了滤波环节。
1.2 永磁同步电机发展概况
永磁同步电机是以永磁体励磁产生同步旋转磁场的同步电机。早期没有永磁同步电机时,采用的是永磁电机。永磁电机由于当时水平的限制,永磁电机十分的笨重且效率不高。但随着钕铁硼等永磁材料的研究和应用,永磁体材料的性能得到了极大的改善和提升,因此永磁同步电机被广泛应用于各大领域。
区别于异步电机,虽然永磁同步电机和异步电机的原理和结构相似,且定子的结构相同,但是二者在转子方面大为不同。永磁同步电机顾名思义,永磁就是指的永磁同步电机转子中含有永磁体,而同步是指其转子和定子的磁场同步。然而异步电机的转子为感应线圈,转子磁场是由感应线圈通过电流产生的磁场,磁场方向随着感应线圈的转动而变化,因此异步电机的转子产生的磁场和定子磁场不同步。此外,永磁同步电机的磁场是由转子永磁体产生的恒定磁场,所以永磁同步电机的电能消耗要小于异步电机,且电机效率高。
随着高性能稀土永磁材料的发现和运用,永磁同步电机的性能愈加优秀,因而被广泛应用到了民用,航空,航海和军事各大领域。
永磁同步电机的起源应追溯世界上第一台电机,因为世界上第一台电机诞生于1831年,是一台永磁电机,但受到当时科技技术的限制,永磁电机发展受限,从而被电励磁电机所取代。而到了20世纪30年代,永磁电机迎来了春天,随着铁氧体永磁等永磁材料的发现,永磁材料性能得到了大幅度提高,永磁电机的发展得到极大的改善。但是在之后的几十年里,永磁同步电机的性能虽然得到了极大的提升,但是伴随而来的永磁材料价格昂贵导致永磁同步电机成本过高的问题没有得到解决,以致于永磁同步电机无法广泛使用,一般只用于高精度场合。这个问题在80年代随着多种低价永磁材料的问世得以解决,永磁同步电机也有了更加广泛的应用。
1.3 减少滤波环节研究现状
滤波器是一种选频装置,可以使信号中特定的频率成分通过,从而极大地减少其他频率的成分,滤波器分类如图1.1。由此可见滤波器的结构复杂,会限制电流环带宽造成驱动性能降低,迫使信号延阻,极大程度的影响了转子位置和转子速度的估计。
(a)按材料工艺分类 (b)按处理信号类型分类
图1.1 滤波器分类
而哈尔滨工业大学的张国强博士经过研究,提出了一种基于无滤波器方波信号注入的永磁同步电机初始位置检测方法,通过将无滤波器载波信号注入观测的转子d轴,从而获得较为精确的转子初始位置信息。该算法收敛速度较快,可在永磁同步电机转子静止或自由运行状态辨识初始位置,维持低速运行,位置观测的最大误差为
 。
。
1.4 逆变器非线性补偿研究现状
由于死区时间和开关器件固有特性等逆变器非线性影响,逆变器输出电压与给定电压之间产生电压误差,在静止轴系下表现为1±6次脉动形式,在同步轴系下则为6k 次脉动形式。k逆变器非线性误差电压效应在定子电流中会产生相应阶次脉动,即静止轴系下1±6k 次脉动,同步轴系下6k 次脉动。逆变器非线性引起的电流脉动不仅使得输出转矩脉动,产生额外损耗;而且使得模型法所得位置/转速观测值中产生观测误差脉动,降低了位置观测精度。通常情况下,通过在电流反馈环路引入低通滤波器可以降低电流(转矩)脉动。然而,滤波器的使用会限制电流环带宽,降低驱动性能,从而影响了系统动态响应能力。因此,各国学者已提出相应的逆变器非线性补偿策略。
限制模型法由于逆变器非线性产生谐波幅值大小而导致低速情况下不稳定,为了解决这个问题,Hejny R W和Lorenz R D提出通过梯形波补偿电压抵消谐波以达到补偿效果 。Park D-M和Kim K-H根据电流谐波检测结果,提出一种参数独立的在线逆变器非线性补偿方法,但该方法局限性较大,只能运用于电机稳定运行的条件下
。Park D-M和Kim K-H根据电流谐波检测结果,提出一种参数独立的在线逆变器非线性补偿方法,但该方法局限性较大,只能运用于电机稳定运行的条件下 。Zhu Z Q 教授等人设计了基于逆变器非线性参数在线估计的补偿方案,虽然获得了一定的补偿效果,但对观测器的要求过高,要准确地跟踪时变扰动量,电机参数、逆变器非线性参数和位置及转速观测量之间相互耦合,但在实际情况中,由于被估参数较多且要求准确,观测器难以达到标准
。Zhu Z Q 教授等人设计了基于逆变器非线性参数在线估计的补偿方案,虽然获得了一定的补偿效果,但对观测器的要求过高,要准确地跟踪时变扰动量,电机参数、逆变器非线性参数和位置及转速观测量之间相互耦合,但在实际情况中,由于被估参数较多且要求准确,观测器难以达到标准 。Park Y, Sul S-K通过电流谐波检测结果,使用积分调整方法控制梯形波变化,削弱逆变器非线性影响,但是也不能根除观测误差的波动分量
。Park Y, Sul S-K通过电流谐波检测结果,使用积分调整方法控制梯形波变化,削弱逆变器非线性影响,但是也不能根除观测误差的波动分量 。浙江大学的陈斌提出根据实验测量的数据,得到误差电压和电流幅值拟合曲线,但该方法建立在精确逆变器非线性模型基础上,不具有普遍性
。浙江大学的陈斌提出根据实验测量的数据,得到误差电压和电流幅值拟合曲线,但该方法建立在精确逆变器非线性模型基础上,不具有普遍性 。
。
1.5 主要研究内容
本文以实现内置式永磁同步电机低速控制系统为研究目标,设计一种基于无位置传感器的低速控制系统,达到提高转子位置估计的目的,在基于dq轴电压信号注入的转子位置观测方法。本文内容和结构如下:
第1章阐述论文的研究背景和意义。对内置式永磁同步电机无位置传感器矢量控制的发展概况做出介绍,并且提出了内置式永磁同步电机无位置传感器矢量控制中存在的问题和研究现象。
第2章首先介绍了永磁同步电机的数学模型,并通过坐标变换,将永磁同步电机的数学模型换算到同步旋转坐标系和静止坐标系下,得出 轴下和
轴下和 下的数学模型。
下的数学模型。
第3章介绍了首先永磁同步电机的原理,并按照转子永磁体差异将永磁同步电机分类,并且详细罗列了永磁同步电机的优点,确定选用电机。然后介绍了传统永磁同步电机矢量控制模型,重点介绍了滞环电流控制和PI电流控制,同时介绍了SVPWM系统,并对其进行了仿真分析。
第4章介绍了永磁同步电机的矢量控制系统,了解传统高频注入法对其基于dq轴注入电压信号,并在此基础上,将连续的电压信号注入转换为周期性电压信号注入,最终得出了正反电压信号注入法,在避免滤波器的使用外,进一步补偿逆变器存在误差,使实验结果更精确。
第5章是总结与展望,对本文进行总结并对系统中仍存在的问题进行展望。
第2章 永磁同步电机的数学模型
2.1 ABC坐标系数学模型
永磁同步电机是以永磁体励磁产生同步旋转磁场的同步电机。建立合适的永磁同步电机模型,有助于永磁同步电机的算法优化。
为了更好更全面的了解永磁同步电机,对永磁同步电机进行了分类。永磁同步电机根据同步电机的转子磁路结构可分为表面式,嵌入式和内装式三类,如图2.1所示。

图2.1 永磁同步的电机转子结构
根据图2.1(a),我们可以看出这种表面式转子永磁体在转子的表面,因此这种转子的结构简单,相应的成本较低,但是其缺点也尤为明显,由于永磁体在转子表面,所以其机械强度较差,一般运用于电机转速要求不高的场合。而由图2.1(b)(c)的嵌入式和内装式两种电机结构比较复杂,对应的其机械强度较好,可以被应用在高速电机场合。表面式永磁电机的气隙可以被看作均匀的,而后两种结构的气隙是不均匀的。
我们可以将永磁同步电机当作一种理想的电机,电机工作时不会产生涡流和磁滞损耗;转子磁路中没有阻尼绕组;电感线性且恒定;电流为对称的三项正弦波电流的理想永磁同步电机模型,用于简化永磁同步电机数学模型。
在ABC坐标系下建立其数学模型,电压方程为:
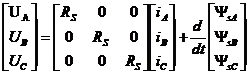 (2.1)
(2.1)
其中, ——定子三相电压(V);
——定子三相电压(V);
 ——定子三相电流(A);
——定子三相电流(A);
 ——定子电阻();
——定子电阻();
 ——定子三相的全磁链(Wb)。
——定子三相的全磁链(Wb)。
磁链方程为:
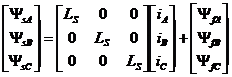 (2.2)
(2.2)
其中,——三相绕组的磁链(Wb)。
 ——定子同步电感(H)。
——定子同步电感(H)。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



