电动叉车控制系统设计毕业论文
2020-02-18 11:05:39
摘 要
叉车是工业生产的有力工具,其转向控制系统则是像其大脑一样的存在,本文对比国内存在的转向系统的种类的优缺点,决定研究电动助力转向系统方面的设计。
然后先主要先学习、阅读了大量的有关助力转向的策略方面的文献,对叉车控制系统有了基本的了解;接着犹如控制系统对叉车一样,电机对控制系统也是无比重要是部分,对比了市面上常见的电机种类,选择了可靠性高,性能更优的无刷直流电机作为助力电机;然后结合常见的控制设计方案,改进了硬件部分和软件部分的设计。
关键词:电动助力转向系统,无刷直流电机,硬件设计
ABSTRACT
Forklift truck is a powerful tool for industrial production, and its steering control system exists like its brain. This paper compares the advantages and disadvantages of the steering system existing in China, and decides to study the design of electric power steering system.
Therefore, this paper mainly studies and reads a large number of literature on power steering strategy, and has a basic understanding of the design; then, like the control system for forklift, motor to control system is also a very important part, compared with the common types of motor on the market, choose the brushless DC motor with high reliability and better performance as the power motor; Combining with common control design schemes, the design of hardware and software parts is improved.
Key words: electric power steering system, brushless DC motor, hardware design
目录
摘 要 I
ABSTRACT II
第1章 绪论 1
1.1引言 1
1.2课题研究意义 2
1.3电动助力转向系统国内外研究现状 2
1.4主要研究内容 3
第2章 叉车电动助力转向系统控制原理研究 4
2.1设计要求和指标 4
2.1电动助力转向系统的工作原理 4
2.2助力控制策略 5
2.2.1基本助力控制 5
2.2.2补偿控制 5
2.2.3回正和阻尼控制 5
2.2.4电机最大电流控制 5
2.3电动助力转向系统电机研究 6
2.3.1有刷直流电动机 6
2.3.2交流感应电机 7
2.3.3无刷直流电机 8
2.4本章小结 10
第3章 控制器硬件设计 11
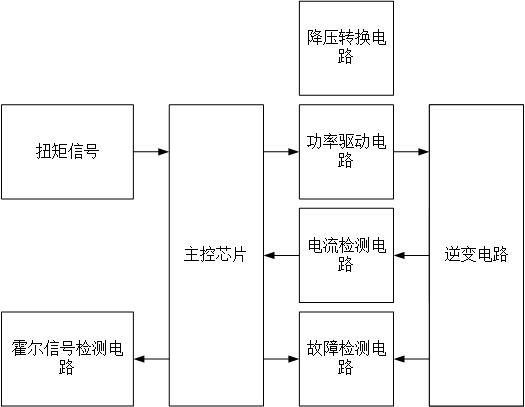
3.1 EPS控制器硬件设计方案 11
3.1.1总体结构 11
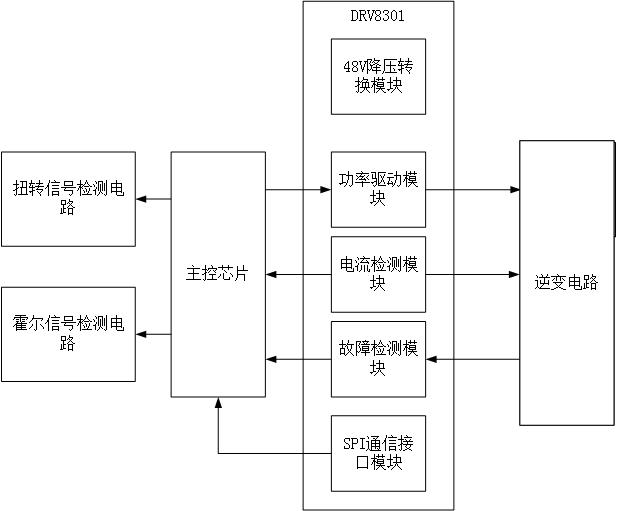
3.1.2 EPS控制器硬件方案设计 11
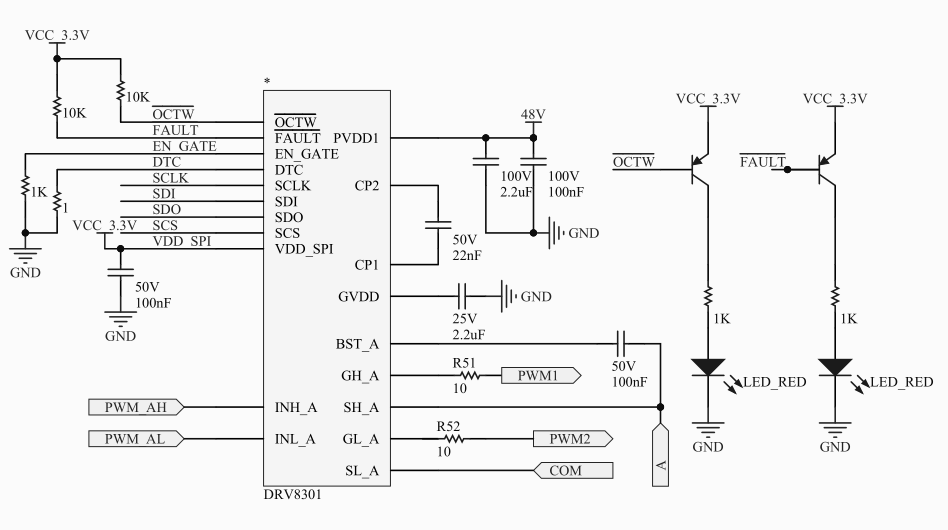
3.2功率驱动电路 13
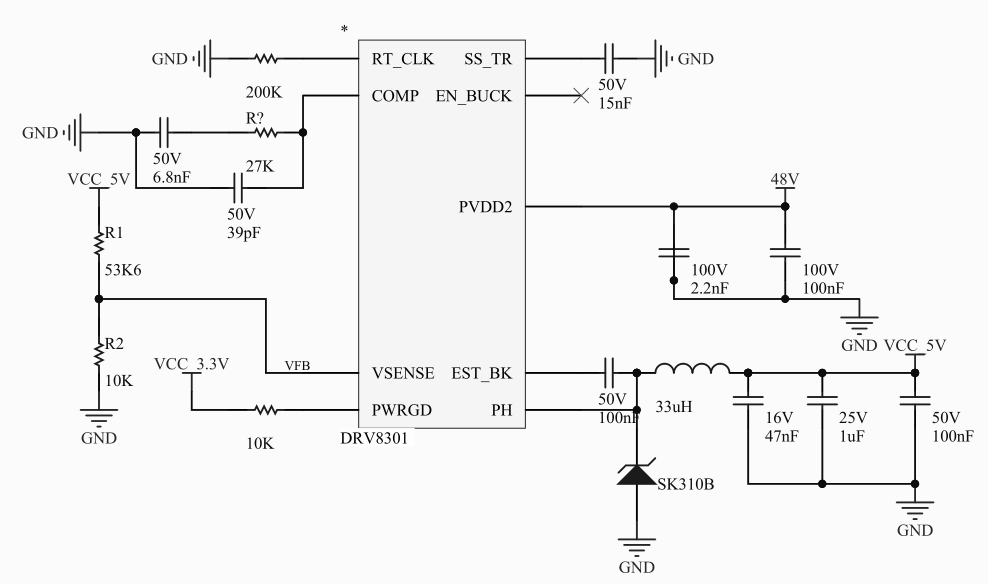
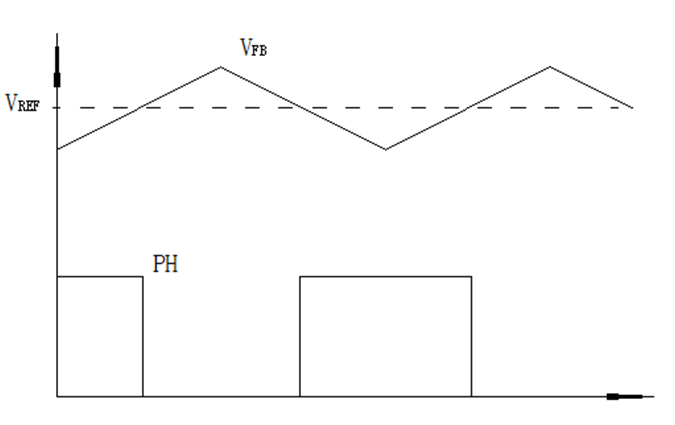
3.3降压转换电路 14
3.4电流检测电路 15
3.5主控芯片研究 16
3.5.1助力转向系统的控制要求 16
3.5.2数字信号处理器的优势和DSP最小系统 16
3.6总体方案确定 17
3.7本章小结 18
第4章 电动叉车助力转向控制器软件设计 19
4.1软件控制流程 19
4.2系统主程序 19
4.3周期性定时中断 20
4.4系统准确性 21
4.5本章小结 21
第5章 总结与展望 22
5.1总结 22
5.2展望 22
参考文献 23
附录A 24
附录B 25
附录C 26
致谢 27
第1章 绪论
1.1引言
叉车是一种广泛应用于物流设备的物料搬运机械,叉车控制系统的研发对世界物流设备的发展具有重大意义。本课题是研究电动叉车控制系统,要求在分析和研究电动叉车控制系统的相关技术的基础上,确定电动叉车控制的整体方案,完成电动叉车控制系统的硬件设计,绘制出系统控制电路图。
叉车的工作的场所和道路都比较窄,路况不像汽车那么好,转向的需求也比较多,而且经常需要完成许多高难度的转弯,叉车是工业搬运车辆,对于转向特性要求比其他车辆更高[1],对叉车的效率和安全行驶至关重要。
下图1-1表明了现在转向系统的主要分类和它们之间的关系。由图可以看出电子液压助力转向系统和机械液压助力转向系统组成了液压助力转向系统,然后又和电动助力转向系统组成了助力转向系统,机械转向系统和动力转向系统是现在转向系统的主流组成成分。前者没有阻力转向,只需要靠人力进行车辆转向,长时间操作对体力的消耗非常的大。后者借助动力来操作转向系统,是在前者的基础上加了动力装置。有了动力的帮助,可以明显的减轻驾驶员的体力消耗。
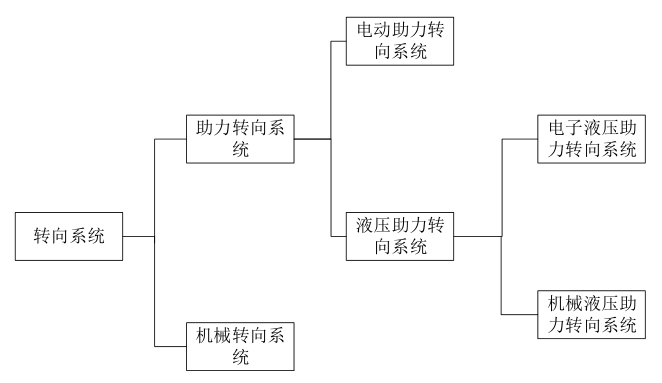
图1-1 常见叉车转向系统
机械液压助力转向系统:液压助力转向系统是保证汽车行驶安全的关键部件, 能够降低驾驶操舵力, 改善驾驶性能[2]。这种助力形式非常的常见,在生活中也广泛应用,他的助力来源于一部分发动机的动力 。因为长时间的研究发展,现在在国内应用非常普及。但是这套系统还是存在不环保等问题。
电动助力转向系统:电动助力转向系统将最新的电力电子技术和高性能的电机控制技术应用于叉车转向系统,能够明显地改善动态性能和静态性能、提高舒适性和安全性、建设环境污染。电动助力转向系统具有减轻自重、可移植性好、结构简单、布置灵活等特点[3]。
电子液压助力转向系统:电子液压助力拥有机械液压助力的大部分优点,不过稳定性不够,成本也高,将成熟的电机控制技术与液压助力转向技术结合[4]。
1.2课题研究意义
叉车在物流行业中发挥着巨大作用,近些年来,传统的内燃叉车也向电动叉车转型。除了更加环保节能,物美价廉也是人们选择电动叉车的原因。但是我国电动叉车还处于起步阶段,国内企业的电动叉车其电机和控制系统都要靠进口。且电动机作为电动叉车的核心部件,国内主要使用的电机有着比较明显的缺陷,有刷直流电机有电刷,需要不断维修更换,交流异步电机虽然没有电刷,但是它的功率因素低,高效区较窄。
所以本文研究的目的:一提出永磁无刷直流电机的控制理论,二以实现电动叉车控制系统国产化为目标。
1.3电动助力转向系统国内外研究现状
上个世纪八十年达末,在转向系统研究上有了大的突破,就是诞生了电动助力转向系统,意义重大在于它结合了电子技术和电机控制技术,由于使用电能作为能源,转向系统变得操作轻便且环保[5]。
提到电动助力转向系统首先要说的就是日本。铃木公司在1988年首次在奥拓这款汽车上试验这个系统[6]。几年后,Honda也在这个领域取得了突破。使装载着系统的汽车受到了全球消费者的欢迎。随着电动助力转向系统在世界上得到了广泛的认可,越来越多的公司开始对电动助力转向系统投入研究。
2002年,Ji-Hoon Kim等人采用硬件在环仿真的方法对电动助力系统的控制策略进行了研究[7]。Roy McCann通过在电动助力转向系统中增加了横摆角速度传感器,并且更具该传感器信号修正电动机的助力大小,改善了汽车转向的稳定性[8]。Toshio Konhno等应用理论对系统进行了研究,以提高系统鲁棒性为目标,建立了电动助力转向系统的数学模型[9]。
国内的相应研究起步较晚。国内最早使用的电动助力转向系统是昌河北斗星,之后开启了国内转向系统的变革。与国外的先进技术相结合,国内的转向系统飞速发展[10]。
作为科研项目,从1998年开始我国就开始了对电动助力转向系统的研究,其中吉林大学,清华大学等已取得较大的突破。作为公司产品,国内近几年才开始了研究,像福林国润株洲易力达等一系列企业在从事相应的研究工作[11]。虽然发展快速,但是也暴露出了很多的问题,比如噪声大,系统可靠性低等。作为生产制造业,由于国内对对其产业标准定义不清晰,各厂家之间产品也不匹配。
1.4主要研究内容
本文的主要研究内容:
- 对比分析了三种常用电机的优缺点,选择出本文要用的电机种类;
- 研究了控制策略;
- 设计了简单可靠的硬件方案;
- 软件设计。
第2章 叉车电动助力转向系统控制原理研究
电动助力转向系统是直接靠电机提供辅助扭矩的助力转向系统,它具有很多优点:它没有液压回路,这样就不仅环保而且结构相对会简单;采用电子控制技术控制,这样不同的车型不需要全部重新设计,给设计者大大减负;仅在转向时电机产生助力,减少了燃油消耗;不存在漏油问题,更加环保。所以相比于传统液压助力转向系统更加的有优势。
2.1设计要求和指标
叉车是在物流领域中非常重要的工具,电动叉车更具有节能环保等的优点。设计高性能的转向系统对物流行业的创新发展具有很大意义。
本课题要求设计电动叉车控制系统的整体的方案,然后完成电动叉车控制系统的硬件设计,绘制系统的控制电路图,然后进行软件设计。
电机的指标如下表2-1。
表2-1 电机指标
指标 | 额定电压 | 额定功率 | 额定转速 | 额定电流 | 输出扭矩 |
数据 | 48V | 440W | 3000r/min | 10A | 1.4N.m |
 2.1电动助力转向系统的工作原理
2.1电动助力转向系统的工作原理
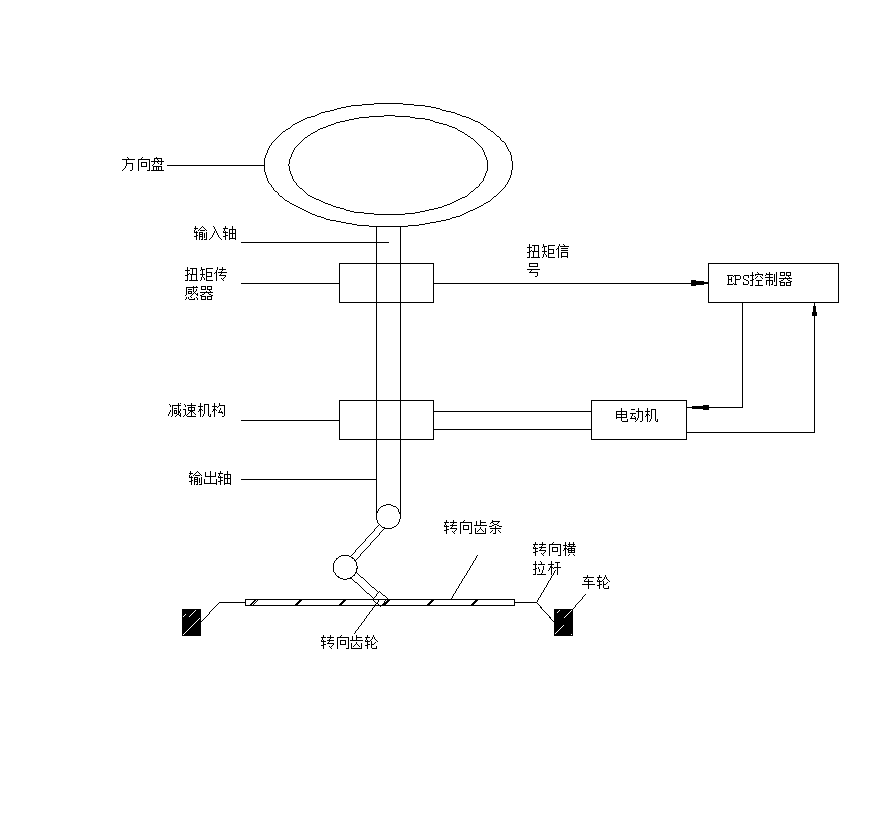
图2-1 叉车助力转向系统结构示意图
系统的结构示意图如图2-1所示,首先驾驶员在转弯的时候控制方向盘转动,这时候转动方向、转矩就通过扭矩传感器传到EPS控制器,控制器再综合其他信号,命令电动机输出需要的转矩,方向盘不动的时候,电动机不工作,由此达到控制的效果。由于车速等因素是反馈的元素,所以无论是低速还是高速还是其他车况都能做到让驾驶员有很好的驾驶体验。
2.2助力控制策略
助力特性指是指当车速和路面状况不同时输出最佳辅助扭矩特性。 通常,它由电动机电流,方向盘扭矩和车辆速度之间的关系表示。 所以只需要对电流进行控制达到控制的目标,则主要的内容包括以下四个。
2.2.1基本助力控制
基本助力控制策略对于控制系统来说是一个重要的部分,是整个转向系统的基础。所以说一个合适,优秀的基本助力控制算法是至关重要的,与驾驶员的驾驶体验也是息息相关的。常常来说,应当是低速的时候驾驶员用大力以便转向能够轻松方便;高速的时候转向力气小些,这样驾驶员就会有很好的路感。
2.2.2补偿控制
补偿控制的出现主要是为了解决一些实际应用中可能会出现的问题,而做的一种改进的算法,像实际的系统中,有很多负面因素影响着控制系统的运转,比如摩擦力矩和转动惯量,还有转向滞碍等问题。所以其实补偿控制是对基本助力控制的一个辅助修正。
2.2.3回正和阻尼控制
和补偿控制类似,实际过程中存在着许许多多的因数导致着系统无法正常运行,就比如在转向盘回正的时候,就会可能有摩擦力矩的损失,或者系统间的间隙等等,导致回正力矩过小,无法使转向盘回正。
这种状况在叉车低速行驶的时候会更加的明显,严重地导致了叉车无法正常的行驶,回正不足。在高速情况下,又会导致回正过度。无论是回正不住还是回正过度都使得叉车没办法正常的工作了。
2.2.4电机最大电流控制
电子器件正常运行的条件有着最大电流、最大温度的限制,但是在电子器件工作的时候难免会有各种情况导致电流过大,导致器件温度升高。所以,需要对电流的最大值进行限制,进行电机的最大电流控制。
2.3电动助力转向系统电机研究
目前在叉车助力转向系统中在国内主要被应用的电机有三种,本文接下来对下面三种电机:有刷直流电机、交流感应电机、无刷直流电机进行对比。
2.3.1有刷直流电动机
有刷直流电动机顾名思义,就是有电刷的直流电动机,它把电能转换为机械能。在工业发展的历史上,由于电刷这个优秀的设计用电池作为电源的直流电机先被发明了出来。虽然之后发明的交流电机有抢了有刷直流的风头,但是1)调速范围广,易于平滑调速;2)启动、制动和过载转矩大;3)易于控制,可靠性高。由于有刷直流电机的这些优点,工业上一些机械对调速要求很高的机械就可以用到有刷直流电机。
有刷直流电机的主要的问题还是容量被限制了,电刷换向器需要不断去修理,检查。还会相互滑动,会摩擦碳刷,造成损耗,需要定期更换碳刷[13]。
下图2-2是有刷直流电机的机械特性曲线,可以看到这是转速和转矩的关系,是一条向右下倾斜的直线,他的倾斜程度只和电枢电阻相关。如图2-2这条直线的斜率只和电枢电阻有关系。
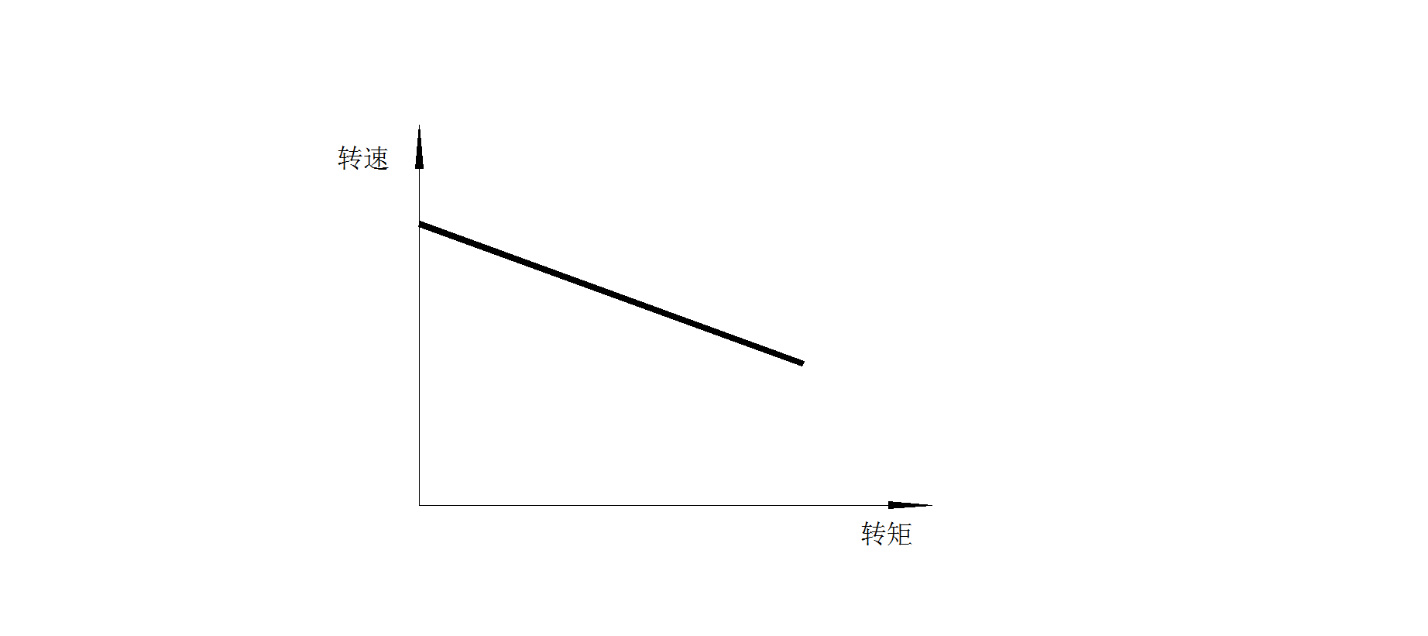
图2-2 有刷直流电机机械特性图
所以从图上可以看出来,当转矩从0增大时,转速由最大不断变小。因此,如果叉车负载过高,则速度可能太低并且可能发生转向延迟或转向偏差。
有刷直流电机在很多时候都是比较有优势的,电刷和换向器这个设计在我看来是个很优秀的设计,但是成也萧何败萧何。因为电刷和换向器的问题,它一直有着容量的瓶颈,电流过大温度过高等的问题导致它不能长时间工作,过载能力也不行,7/10的有刷直流电机出现的故障都直接间接和电刷和换向器相关。但是这样的麻烦在无刷直流电机
那里就迎刃而解了。下表2-1是这两种电机的特性的比较。
表2-1 无刷直流电机与有刷直流电机特性比较
特性 | 无刷直流电机 | 有刷直流电机 |
换向 | 根据霍尔位置传感器进行电子换向 | 电刷换向 |
维护 | 基本不需要 | 需要定期维护 |
转子惯性 | 小,转子上有永磁体,改进了动态响应 | 较大的转子惯量限制了动态特性 |
寿命 | 长 | 短 |
转速/转矩特性 | 平坦 | 中等平坦 |
效率 | 高 | 中等 |
输出功率/体积 | 高 | 中等/低 |
制造成本 | 较高 | 低 |
控制 | 复杂且昂贵 | 简单且便宜 |
2.3.2交流感应电机
交流感应电机结构是转子动,定子静止。由于绕组在定子上,所以散热能力要强于有刷直流电机。同时有制作方便、价格便宜、运行方便等优点[14]。
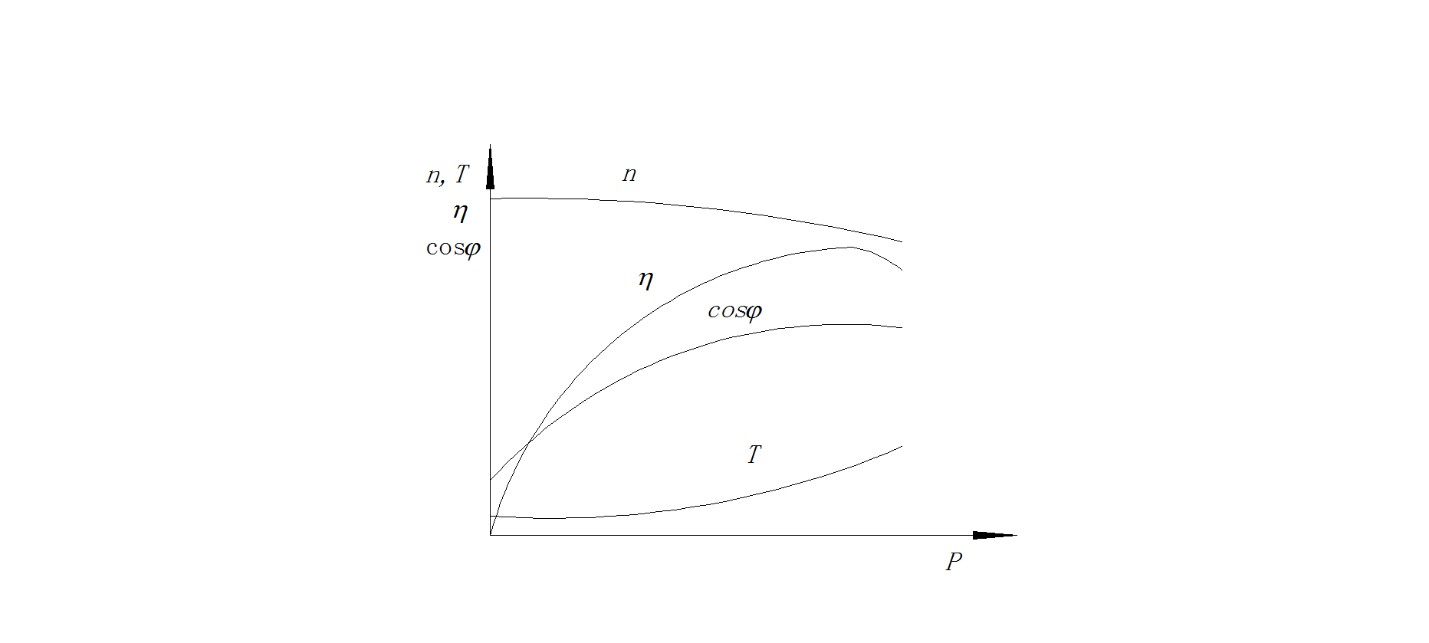
图2-3 交流感应电机的工作新特性
上图2-3可以看出:(1)可以看出来当功率由零增大的时候,交流感应电机的转速就会慢慢下降,整体表现为一条向右下倾斜的一条曲线,这一点和有刷直流电机有点相似;(2)电磁转矩T随着输出功率的增大而增大,近似于一条直线;(3)电机的调速和启动特性不是很理想;(4)由于只有当负载等于额定负载的时候,交流感应电机的效率才会最高,其他时候效率都会很低,所以只有运行在额定转速,但是转向的时候会需要其他的转速,这时候为了得到合适的转速就得附加多级减速器,但是我们知道级数越多,中间损耗就越多。在这点上交流感应电机的效率就要比无刷直流电机低了;(5)效率在外部负载和额定负载相等时达到最大值,其他时候电机效率较低。所以在负载恒定的场合它才能发挥它的作用;(6)转速越低越节能。
则下表2-2对这两种电机之间进行了比较。
表2-2 无刷直流电机与交流感应电机特性比较
特性 | 无刷直流电机 | 交流感应电机 |
转速/转矩特性 | 平坦 | 非线性 |
输出功率/体积 | 高 | 中等 |
转子惯性 | 小-动态特性佳 | 大-动态特性差 |
启动电流 | 额定值-无需专门启动电路 | 大约是额定值的7倍-谨慎选择合适的启动电路 |
控制要求 | 始终需要控制器 | 固定转速不需要;需要改变转速时才需要控制器 |
差频 | 定子和转子磁场的频率相等 | 转子频率要低于定子,差值就是差频,负载增加差频也增加 |
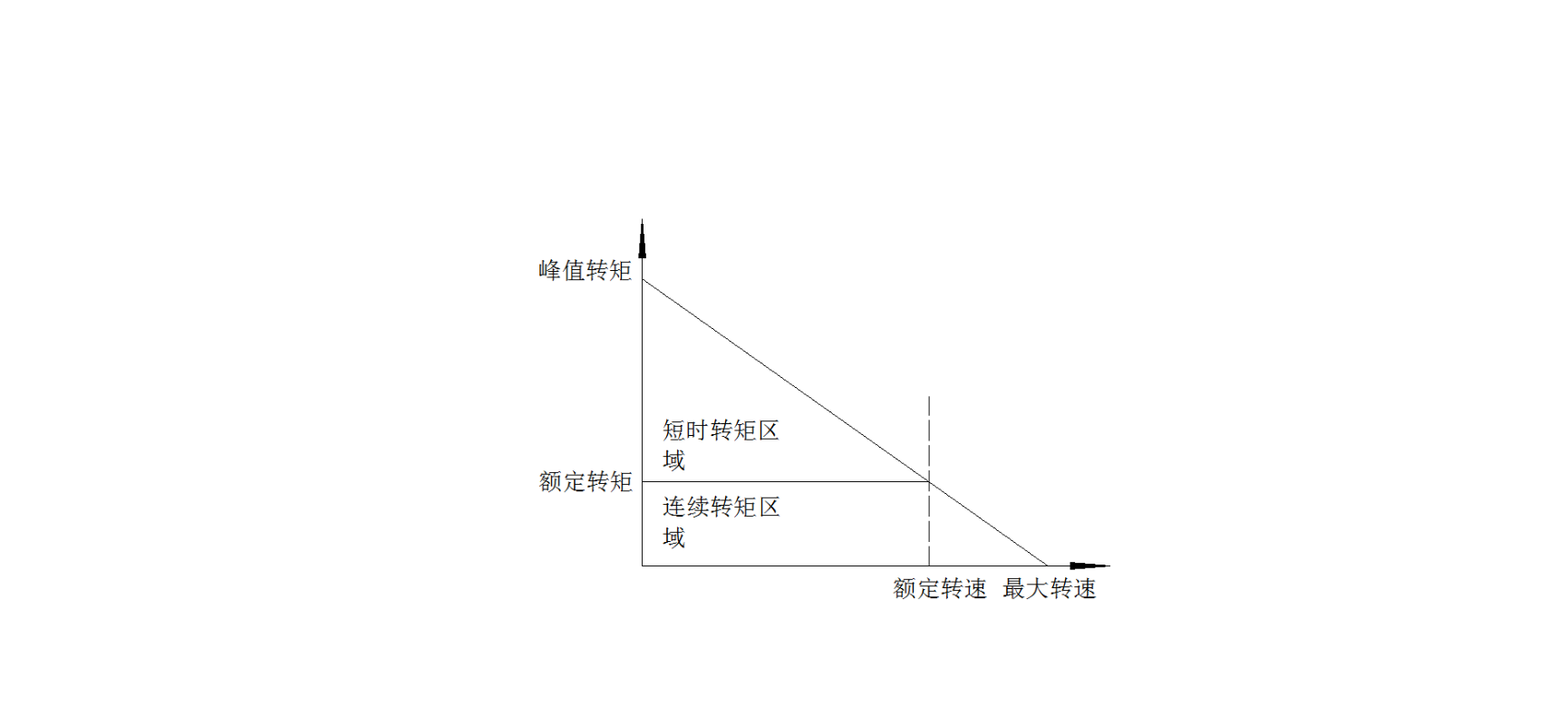
2.3.3无刷直流电机
说起无刷直流电机的发明,就不得不提半导体电子技术的发展,随着它的发展,将电力电子技术,控制技术和电机技术相结合,创造出了无刷直流电机。从发明的时间长短来看无刷还远远比不上有刷。无刷直流电机的初始是1955一群人的一款有关电刷替换的专利;然后他真正意义上的诞生是在1962年“固体换相直流电机”的专利的申请。几十多年来,在能想到的各种领域都逐渐有了它的身影,它的优秀性能已经让越来越多的人喜爱它了。
虽说从名字上来看,它好像是直流电机,但是在电动机结构方面,无刷直流电机竟然是和交流同步电机相似的。无刷直流电机其实是通过除电动机之外的另一重要部分电子驱动器来进行逆变来对电动机进行驱动。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



