新能源并网逆变器分数阶控制策略研究毕业论文
2020-02-18 10:59:29
摘 要
近些年来,化石、煤炭等传统能源日渐枯竭,新能源的开发和利用成为人们关注的对象。然而,伴随着新能源并网发电系统的迅速发展,一些问题也亟待解决,例如并网逆变器的并网电流波动较大以及观测器电压不稳定等。这严重阻碍了新能源的推广。针对这些问题,本文提出了一种基于分数阶控制的新能源并网逆变器控制策略,并利用simulink进行了仿真。
首先,利用广义积分器构建正交滤波器,并在此基础上搭建电压观测器,以此来观测电压,利用PR控制对并网逆变器进行控制,得到并网电流、直流电压等波形。
其次,基于simulink搭建分数阶PID控制器,并用分数阶控制器取代PR控制器来控制逆变器,将得到的并网电流等波形与PR控制进行对比,对比可得分数阶控制下的并网电流、直流电压等的峰值都比较小,比PR控制有更好的控制效果。
最后,将控制对象参数上调10%,再次进行仿真对比,得出分数阶控制比PR控制有更好的鲁棒性;之后分别加入阶跃扰动和白噪声,观察并网电流、观测器电压等对象的谐波畸变率。得出分数阶控制比PR控制有更好的抗干扰效果的结论。
关键词:PR控制;分数阶PID控制;并网电流;电压观测器电压;新能源;三相逆变器;并网逆变器
Abstract
In recent years, fossil, coal and other traditional energy sources are increasingly exhausted, and the development and utilization of new energy sources has become the focus of attention. However, with the rapid development of new energy grid-connected power generation system, some problems need to be solved urgently, such as the large fluctuation of grid-connected current of grid-connected inverters and the unstable observer voltage. This has seriously hindered the promotion of new energy sources. To solve these problems, a Fractional-order Control Strategy for grid-connected new energy inverters is proposed in this thesis.
Firstly, an orthogonal filter is constructed by using generalized integrator, and then a voltage observer is built to observe the voltage. PR control is used to control the grid-connected inverters, and the waveforms of grid-connected current and DC voltage are obtained.
Secondly, the fractional-order PID controller is built based on simulink, and the fractional-order controller is used to replace the PR controller to control the inverters. The waveforms of the grid-connected current and the DC voltage under the Fractional-order Control are compared with those under the PR control. The peak values of the grid-connected current and the DC voltage under the Fractional-order Control are smaller, and the control effect is better than that of the PR control.
Finally, the parameters of the control object are increased by 10%. The simulation results show that fractional order control has better robustness than PR control. Then step disturbance and white noise are added to observe the harmonic distortion rate of grid-connected current and observer voltage. It is concluded that fractional order control has better anti-jamming effect than PR control.
Key Words:PR control, fractional order PID control, grid-connected current, the voltage of observer, new energy sources, three-phase inverters, grid-connected inverters
目录
第1章 绪论 1
1.1课题研究背景和意义 1
1.2并网逆变器控制策略国内研究现状 1
1.2.1双模PI控制 1
1.2.2以PR控制器为基础的无交流电压传感器控制 3
1.3本文结构安排 3
第2章 PR控制 4
2.1 PR控制器的设计 4
2.2 仿真模块 5
2.2.1 正交滤波器 5
2.2.2 电压观测器 6
2.2.3 坐标变换模块 6
2.2.4 PI控制模块 8
2.2.5 VSC模块 9
2.3 控制总框图 9
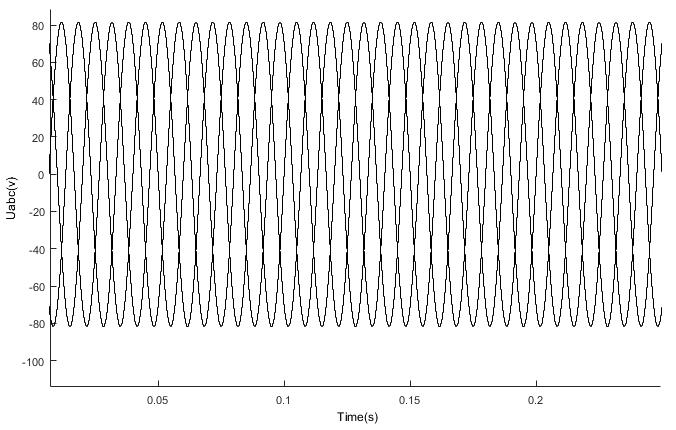
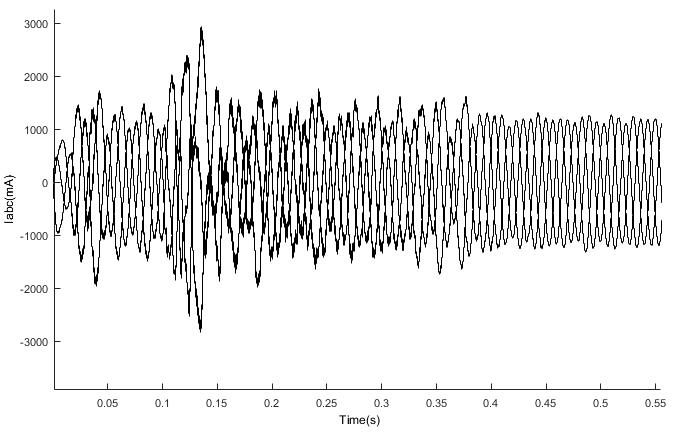
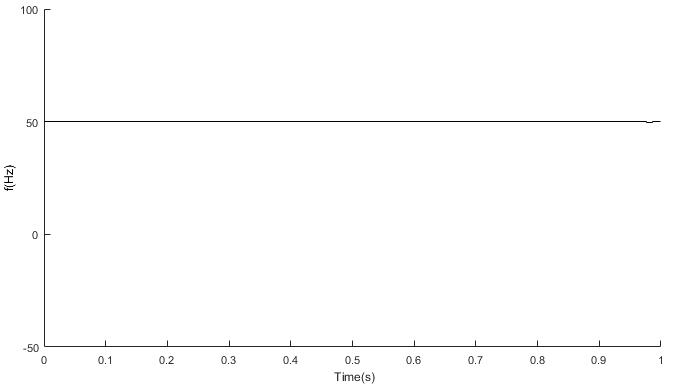
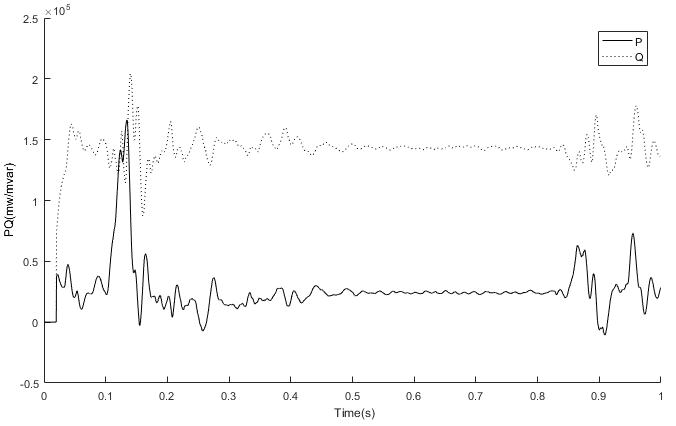
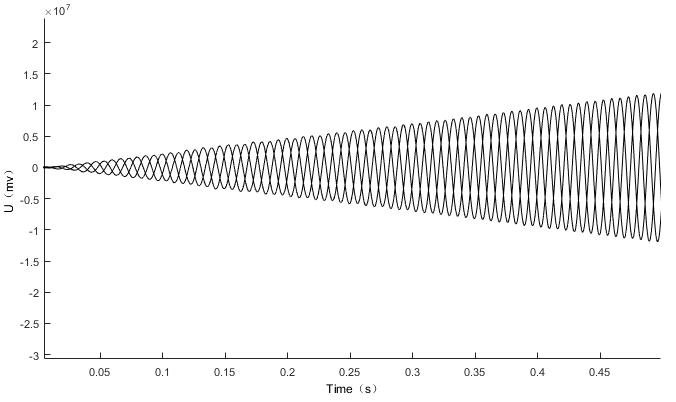
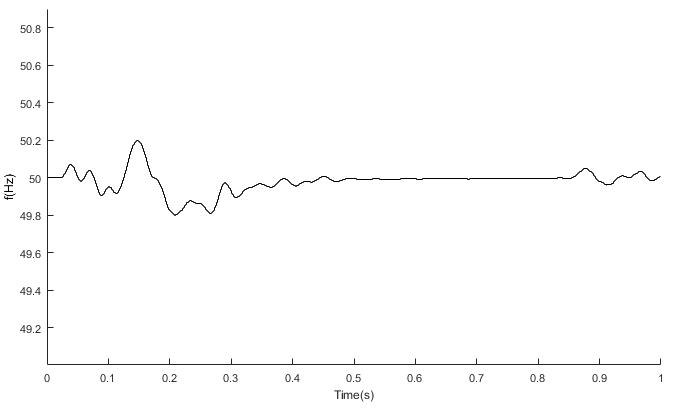
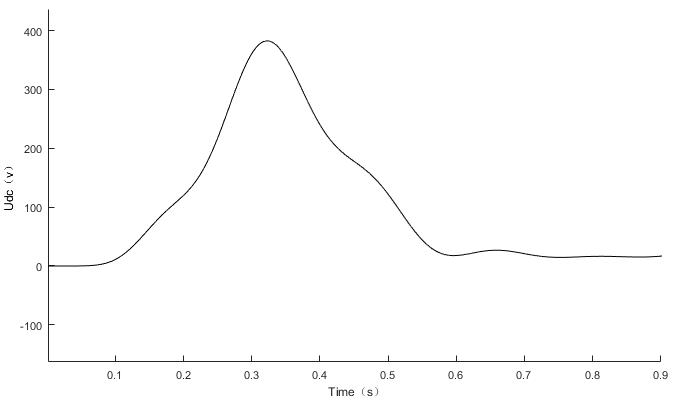
2.4 仿真波形图 11
2.5 本章小结 14
第3章 分数阶PID控制 15
3.1 分数阶背景 15
3.2 国内外成果和现状 15
3.3 分数阶控制器设计 16
3.4 仿真结果 18
3.5 波形参数对比 22
3.6 本章小结 22
第4章 PR控制与分数阶PID控制比较 23
4.1 谐波分析 23
4.2 扰动信号干扰 25
4.3 鲁棒性比较 30
4.4 本章小结 35
第5章 总结与展望 36
参考文献 37
致谢 39
第1章 绪论
1.1课题研究背景和意义
最近些年,石油、煤炭等燃料日渐枯竭,而且传统能源所带来的环境污染问题也越来越得到人们的关注。在这种形势下,新能源的开发和利用已成为当下主流。然而,一些新能源例如风能、太阳能等在接入电网时仍然存在着很大问题。太阳能、风能等极不稳定,干扰因素太多,因此在接入结构较薄弱的配电网的时候,就很有可能会出现并网电流不稳定和谐波畸变率太大等问题 [1-2]。为了得到较稳定的并网电流和观测器电压,需要实时得到电网电压信息,锁相环是目前采用的最多的一种方法,但是锁相环控制容易受到一些因素的影响,例如电网电压不稳定等,而且很有可能会降低接入电网的电能质量[3][4]。
现有的并网逆变器的控制方法其实有很多种,其中比例积分(Proportional Integral,PI)控制、比例复数积分(Proportional Complex Integral,PCI)控制、重复控制、无差拍控制、滞环控制及模糊控制等逆变器控制策略各有优缺点。其中 PI 控制虽然算法简单,可靠性较高,动态响应也比较快,而且可以消除直流稳态误差,但是对于交流稳态误差却没什么太大的作用;相比之下,重复控制是通过基波周期来达到误差校正的作用,虽然稳态性能较好,但是暂态性能较差[5]。
基于上述原因,本问研究了基于分数阶PID控制的并网逆变器控制,期望较好解决并网电流不稳定、观测器电压波动大等问题,并希望提升并网逆变器的抗干扰能力。
1.2并网逆变器控制策略国内研究现状
1.2.1双模PI控制
PI 控制器是逆变器控制中应用最多的一种控制,但是PI控制有很多的缺点,就比如它易产生静差,而且对谐波的抑制的效果也没有想象中那么好。因为并网逆变器的控制信号和扰动信号一般是周期信号,所以可以对周期信号实现无静差控制的控制器就会收到国内外研究者的密切关注。满足这一特点的控制器有很多,其中就包括谐振控制器以及重复控制器。
PI控制器的优点很明显,那就是它可以对一些特定的交流信号实现无静差控制,除此之外,它的动态响应特性也比较好。于此同时,它也存在一些劣势,那就是它的适用范围不大,而且它起不到抑制各次谐波的作用[6]。复合控制器(包含重复控制)不仅具有较好的控制效果,而且它还弥补了重复控制动态性能差这个缺点,但是复合控制器的设计比较复杂。以上所述的控制器虽然都有自己的优点,但它们的不足也很明显,单独使用某种控制可能难以达到理想效果,所以有学者就提出了并网逆变器的双模PI控制,它同时拥有PI控制和重复控制的优点,而且基于此理论设计的控制器能有效抑制奇次谐波和偶次谐波[7]。
在这,我们不详细叙述该控制的设计方法以及其传递函数和一些参数的设定,只是作一些大概的介绍。
双模PI控制器如图(1.1)所示:
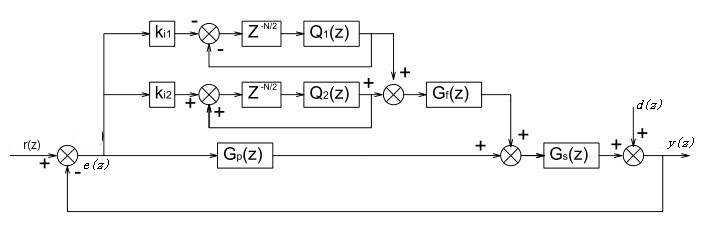
图1.1 双模PI控制器结构
其中,r(z)是给定的参考信号,e(z)是系统误差,d(z)是外部扰动,y(z)是输出信号,是积分环节,是比例环节,是相位补偿环节,主要用于补偿因参数不确定而引起的相位滞后的问题,和是低通滤波器,是受控对象[8]。
双模结构重复控制器如图(1.2)所示:
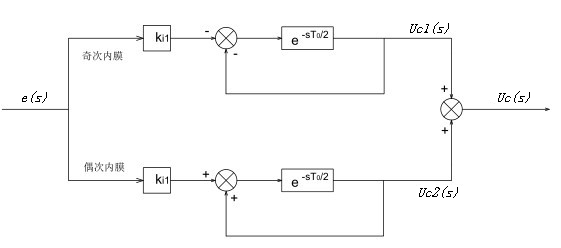
图1.2 双模结构重复控制器
其传递函数为:
通过仿真和实验证明,双模PI控制器对于并网逆变器有很好的控制效果。它设计简单而且响应快,更重要的是鲁棒性好。另外,双模PI控制还能有效抑制谐波,对于提高电能质量的作用也很明显。
1.2.2以PR控制器为基础的无交流电压传感器控制
无交流电压传感器控制方法不依赖电网的电压信号,所以不会受到电网电压波动的影响,这个优点是锁相环控制所不具备的。因此对比之下,无交流电压传感器控制就毫无疑问的得到了诸多国内外研究者的关注。
现有的无交流电压传感器控制为了计算电网电压角度,需要在同步坐标系下对电流进行积分。这种方法容易受到干扰而且精度也不高,除此之外还要用到低通滤波器,低通滤波器本身也存在很多诸如零点漂移等的缺点,所以系统的响应速度并不好。
而接下去要论述的控制方法是一种以正交滤波器和PR控制器为基础的。基于二阶积分器来构建正交滤波器,在此基础上构建电压观测器来观测电压,最后利用PR控制器实现对并网逆变器的控制。
本次毕业设计就是通过simulink仿真平台对该控制方法进行仿真,并在此基础上用分数阶PID控制代替逆变器PR控制,进而比较两种控制的优缺点。
1.3本文结构安排
第1章:介绍本文的研究目的、背景和意义,以及介绍几种并网逆变器的控制策略。
第2章:利用simulink搭建框图中的各个模块,介绍PR控制器并利用PR控制器来实现对逆变器的控制,得到观察对象的波形图。
第3章:介绍分数阶控制,搭建分数阶PID控制,用其取代PR控制器来实现对逆变器的控制,得到对象的波形图,并与PR控制进行波形对比。
第4章:比较分数阶控制和PR控制的鲁棒性,以及对比两种控制的抗干扰效果。
第5章:总结全文并展望。
第2章 PR控制
2.1 PR控制器的设计
PI控制(比例微分控制)是有效值的调控为基础的,它可以使输出量的有效值保持恒定,而且PI控制器对高频信号的增益会较低,而对低频信号会有较大的放大作用。假如使用PI控制器对50Hz及以上(角频率314rad/sec)的正弦波进行跟踪,系统的跟踪特性会较差,而且会把低频噪声放大。在直流控制系统中,常用的控制器就是PID控制器了。然而,在交流系统中,整数阶PID控制器无法对高频率信号进行实时跟踪,所以并不能满足设计要求[9][10]。而PR控制器(比例谐振控制),能有效追踪某种特定频率的信号。因此,我们可以用PR控制器来实时控制交流信号。
PR控制器的传递函数如下:
这是理想的PR控制器的传递函数,这种理想的PR控制器只对单一的频率起作用。但实际上,例如逆变器,参考波形可能在频率上有正负1Hz的变化,或者由于测量采样的不确定性,因此在运用中,会用以下的变形来替代上面的理想控制器。实际PR控制器传递函数为:
其中,是截止频率,引入的好处是可以改善PR控制器的频带特性,加宽它的高增益频带,但是引入不会改善PR控制在频率点处的最大增益特性。一般来说,越小,选频特性会越好,但其增益波动会比较大,可能会影响到系统的稳定性。这里我们可以让取。
选择比例系数和积分系数的时候也有一些需要注意的地方。在选择比例增益系数时,应该首先保证系统的稳定性及良好的瞬态响应,在系统稳定的前提下,可以适当增大增益系数;积分系数用来改善基频特性,保证一定的相位裕度,不至于太小,应该在达到消除静态误差的条件下合理选择[11-13]。这里,我们选择,,,,利用simulink对实际PR控制器进行模型搭建,得到其仿真模块如图(2.1)所示。
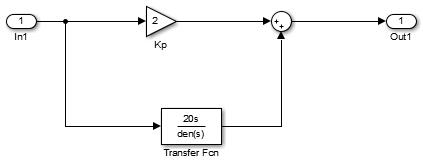
图2.1 PR控制器
其传递函数为:
仿真模块
2.2.1 正交滤波器
正交滤波器能够实现对交流信号跟踪,其基于simulink的仿真如图(2.2)所示。
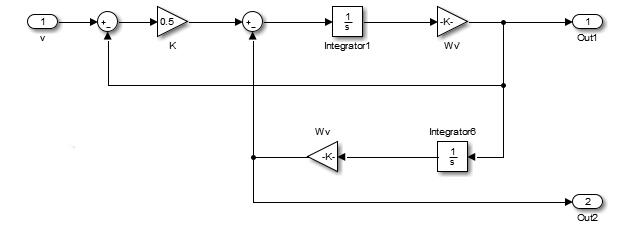
图2.2 正交滤波器
其中,v为输入信号,是待观测交流信号的角频率,因为设定电网电压为50Hz的三相电压所以,K为滤波器的增益系数,设置为0.5,两个输出Out1和Out2代表一对正交信号和,其中与v的相位是相同的,与此同时的相位比v的相位落后90度。
其传递函数:
2.2.2 电压观测器
基本的电压观测器模型可以根据三相并网逆变器的模型推导得出:
但是寻常的电压观测器的模型中存在电流的微分项,这容易引起干扰。而基于二阶广义积分器的正交滤波器可以较好地解决电流微分运算问题,并能有效降低谐波干扰,基于正交滤波器的无交流电压传感器控制具有较好的动态响应速度,上式就可以改写成实用的电压观测器。
如图(2.3)所示,是以正交滤波器为基础而搭建的电压观测器仿真模块:
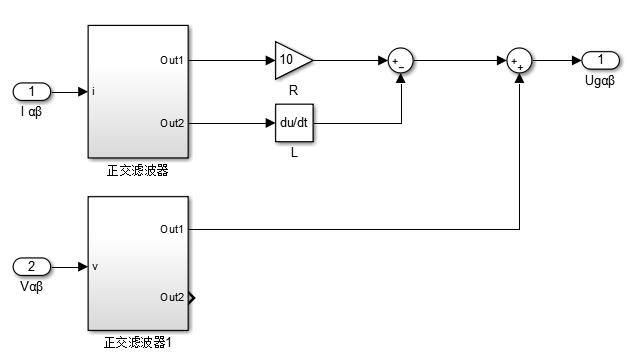
图2.3 电压观测器
2.2.3 坐标变换模块
abc坐标转化为坐标(Clark变换):
式中,表示坐标轴与坐标轴a的夹角;
当坐标轴与坐标轴a重合时,,有
在simulink中仿真模块如图所示:
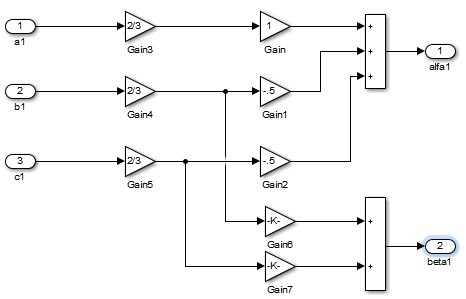
图2.4 abc转
坐标转化为abc坐标(Clark反变换):
在simulink中仿真模块如图所示:
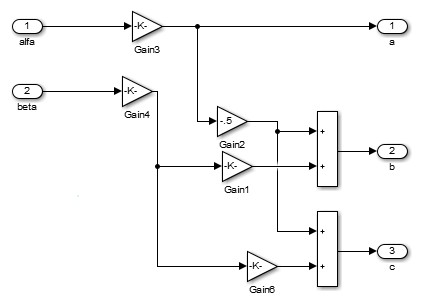
图2.5 转abc
dq坐标转化为坐标(park反变换):
在simulink中仿真模块如图所示:
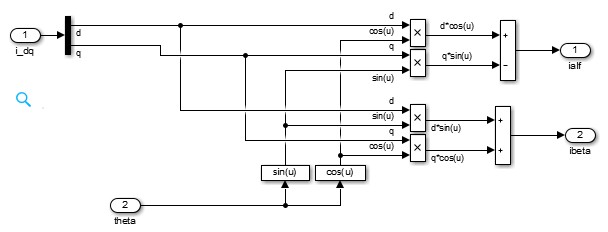
图2.6 dq转
2.2.4 PI控制模块
控制框图中需要得到有功电流信号和无功电流信号,具体的方法是将整流后的直流电压与给定的直流电压指令作差,将差值进行PI控制得到有功电流信号;将测得的无功功率与给定的无功功率指令作差,将差值进行PI控制得到无功电流信号。所以,这里的PI控制就直接调用的simulink中的PID Controller模块,模块的参数设置如图所示[14]:
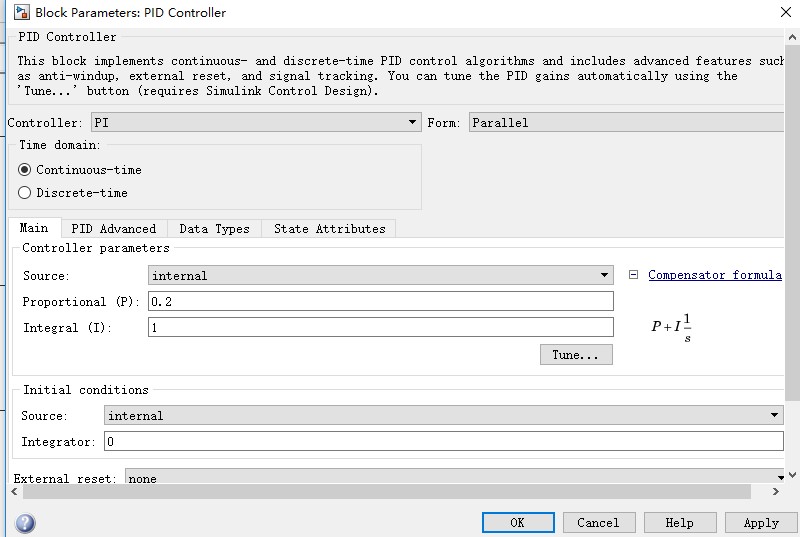
图2.7 PI模块参数设置
2.2.5 VSC模块
VSC即电压源换流器,它是由具有关断能力的器件,例如绝缘栅双极晶体管(IGBT)组成的换流器。实际上它是由单个或多个换流桥组成的进行交直流转换的设备,所以换流器可以分为整流器和逆变器两类,我们利用PWM来控制其导通或是关断。在这里,主要是利用它来得到我们需要的直流电压,我们可以调用simulink库中的Three-level Bridge模块,其一些参数的设置如图所示。
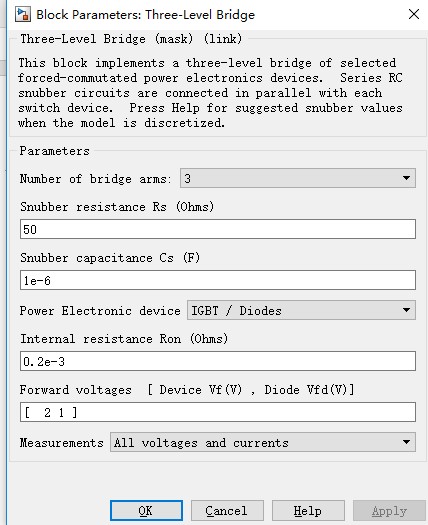
图2.8 VSC参数设置
2.3 控制总框图
基于上述电压观测器、坐标变换模块以及PR控制器可以搭建图(2.9)所示系统总框图:
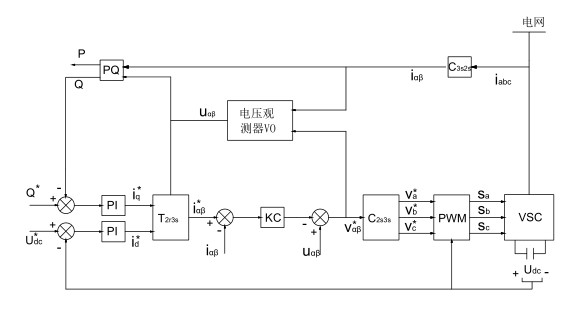
图2.9 控制总框图
其中KC就是基于PR控制的电流控制器;C3s2s、T2r2s、C2s3s是坐标变换模块;VSC为整流/逆变模块,为更贴近实际,在电网和整流/逆变模块之间添加了一个变压器。此次仿真设置电网电压为相电压是100V,频率为50Hz的三相电压。
包括以下步骤:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



