基于智能算法的新能源汽车驾驶行为分析与预测毕业论文
2020-04-09 14:08:57
摘 要
近年来数据挖掘的相关算法与技术发展迅速,行业相关的数据迅速积累,将数据挖掘技术应用到车辆行驶安全问题的改进之中,有效的提高行车安全度已经成为新能源汽车应用领域的重要课题。本文根据车辆行驶的动态过程与实时数据,对车辆危险驾驶行为作出微观程度的分类,对超速驾驶行为、偏离车道驾驶行为、剧烈变速驾驶行为的主要特征进行分析;基于车辆行驶实时数据,分别采用机器学习中的决策树算法、人工神经网络与支持向量机构建驾驶行为识别预测模型,使用车辆行驶数据对不同模型的预测准确度进行测试,从收敛速度、模型复杂度、泛化性能等方面对比分析不同模型的特点;基于python语言对车辆驾驶行为识别系统框架进行设计,对系统服务的实现的需求进行分析,总结系统实现需要的技术与具体方法。
关键词:危险驾驶行为;数据挖掘;scikit-learn;分类
Abstract
In recent years, related data mining algorithms and technologies have developed rapidly, industry-related data have been rapidly accumulating, and data mining technologies have been applied to the improvement of vehicle safety issues. Effectively improving traffic safety has become an important issue in the field of new energy automotive applications. . Based on the vehicle driving process and data, this paper classifies the dangerous driving behaviors of vehicles as speeding behaviors, driving behaviors that deviate from lanes, and drastic speed changing behaviors from the microscopic perspective, and analyzes the main characteristics of dangerous driving behaviors; based on the real-time data of the vehicles, the machines are used respectively. The decision tree algorithm, artificial neural network and support vector machine are used to construct a driving behavior recognition and prediction model. The prediction accuracy of different models is tested by using vehicle driving data. The convergence speed, model complexity and generalization performance are compared and analyzed. The characteristics of different models; Based on the Python language, the vehicle driving behavior identification system framework is designed, the requirements for the realization of system services are analyzed, and the technologies and specific methods required for system implementation are summarized.
Key Words:risky driving behavior; data mining; scikit-learn;classify
目录
摘要 I
Abstract II
第1章 绪论 1
1.1研究背景与意义 1
1.2国内外研究现状与综述 2
1.2.1国内外研究现状 2
1.2.2国内外文献研究综述 3
1.3主要研究内容与技术路线 3
1.3.1研究内容 3
1.3.2技术路线 4
第2章 危险驾驶行为分类与分析 6
2.1超速驾驶行为 6
2.2偏离车道行为 7
2.3剧烈变速行为 8
第3章 驾驶行为识别算法与建模 9
3.1决策树算法 9
3.1.1算法分析 9
3.1.2构建决策树 10
3.1.3 模型评估 12
3.2 神经网络 13
3.2.1 算法分析 13
3.2.2 构建神经网络 15
3.2.3 模型评估 17
3.3支持向量机 17
3.3.1 算法分析 17
3.3.1构建支持向量机 19
3.3.2 模型评估 21
3.4总结分析 22
第4章 驾驶行为识别系统建立与部署 24
4.1系统总体框架 24
4.2后端服务实现 24
第5章 总结与展望 28
5.1全文总结 28
5.2研究展望 28
参考文献 30
致谢 31
第1章 绪论
1.1研究背景与意义
近几年来,随着物联网与云计算技术的发展与广泛应用,在许多行业中其特定系统运行所产生的数据量都在以极快的速度增长着,海量数据潜在的巨大价值的越来越受到人们的重视,社会已经步入了大数据时代。在这样的背景之下,如何充分有效地利用海量数据、通过适当的大数据分析方法获得更直接更有效的信息己经成为社会各个行业都十分关注的未来发展策略,本设计聚焦于新能源汽车的交通安全问题,通过数据挖掘相关算法分析车辆行驶大数据,构建危险驾驶行为识别预测模型。
在国民经济水平快速提高与交通运输行业快速发展的同时,我国道路交通状况也面临着越来越多的挑战,营运车辆大幅增加,道路交通日益繁忙,交通事故的数量也在持续增长。造成交通事故的原因往往是多个方面的,但驾驶员的人为因素常常占据重要的部分。在许多重大交通事故之中,驾驶员的不良驾驶习惯和危险驾驶行为都被证明是主要的诱因,并且不恰当的驾驶行为也造成了车辆行驶的能源消耗加大、车辆部件的非必要磨损增加等资源浪费情况的发生,如果能够通过车辆的驾驶数据将这些异常驾驶行为进行实时分析加以识别,并向驾驶员发出危险驾驶行为警报,提醒驾驶员注意自身的驾驶状态,就能够在一定程度上更正驾驶员的不良驾驶行为,降低道路交通事故以及其他不利于节能减排等事件的发生概率,有助于车辆保持较好技术状况。
在交通运输行业,得益于车辆及其相关设备生产商大数据应用意识的提高以及车联网技术的广泛应用,车辆驾驶行为大数据已经得到了大量的积累并且仍在快速的增长之中。在车辆驾驶过程中,车辆各部分设备的运行状态参数由对应的检测装置获取,车辆的位置信息可以由完备的卫星定位系统提供,驾驶员的操作行为及生理状态可以直接通过计算机视觉相关技术获取或通过对操作部件的检测进行分析估计,随着智慧城市的规划部署,道路交通中的外部环境信息也可以参与到驾驶行为大数据的分析之中,使相关系统的准确度与实用性都有了很大的上升空间,对车辆驾驶数据的数据挖掘会带来同时惠及车辆生产商、运营商与用户的巨大帮助。
本设计依托于开源驾驶行为数据集对驾驶行为作出分类,分析危险驾驶行为特征,分别通过决策树、神经网络和支持向量机算法模型对新能源汽车驾驶行为数据进行分析,通过监督式学习建立对应的车辆驾驶行为识别模型,建立并部署驾驶行为实时识别服务,这一系统的实现,对驾驶员行车安全与规范化有重要实际意义,对新能源汽车技术的改良与发展方向具有启发意义。
具体来说,驾驶行为识别系统实时接收车辆的驾驶数据,在远程服务器完成数据分析,对驾驶行为类别做出判断,将判断结果实时反馈给车辆驾驶者,对驾驶员的危险驾驶行为做出警示,降低交通事故的发生几率。同时,车辆驾驶行为大数据的积累为进一步的数据分析提供了数据来源,有助于对新能源汽车驾驶行为特征的进一步分析,帮助交通管理部门更好的掌握交通信息,制定更有针对性的措施以改善交通状况,提高道路行车的安全性与效率。
基于智能算法建立的新能源汽车驾驶行为识别分析与预测系统同时也是新能源汽车车辆驾驶辅助系统重要实现方式,在本次设计中对不同的驾驶行为做出分析,通过不同的智能算法建立驾驶行为识别模型,通过数据测试,对模型的准确度、复杂度与泛化性能等特征做出对比分析。
1.2国内外研究现状与综述
1.2.1国内外研究现状
在上个世纪末,Oliver Pentland首先提出了驾驶行为识别问题,并引入了模式识别的方法实现驾驶行为识别,在驾驶行为识别的命题基础上进一步发展出了驾驶员意图识别、驾驶场景理解、驾驶模式识别等方向。驾驶行为识别主要是在分析各类驾驶行为之间相互影响的关系的基础上对车辆外在的行驶状态进行判定,其中对于危险驾驶行为的研究始终是驾驶行为识别中的重要方向。
在危险驾驶行为的分析预测方法中,模式识别的理论方法是国内外学者主要采用的方法,首先对驾驶行为做出人为分类,在此基础上采集相应的分类数据,选择适合的分类器模型算法训练和测试识别模型。
在国外学者的研究中,基于数理统计方法的隐马尔可夫模型(HMM)凭借其识别时序特征的数据时具有的独特优势,得到了广泛的应用。许多学者也采用了人工神经网络、支持向量机、高斯混合模型以及贝叶斯网络等分类方法对驾驶行为进行识别,同时,在建模过程中使用几种算法理论的组合也是许多研究人员的思路并取得了出色的成果。还有不少学者通过对驾驶场景的深入分析建立了特定的驾驶行为识别规则,在此基础上建立了特定的识别模型,也取得了不错的成果。
受到国外学者成果的启发,国内研究人员在驾驶行为辨识方面也获得了许多成果,运用的方法主要是模式识别的方法。在已有的相关学术研究报告文献中,除了基于GPS和北斗卫星定位系统的位置信息外,车辆速度、加速度,使用图像采集装置记录的驾驶员生理特征、车辆外部路面信息等都是众多研究人员进行数据分析的数据来源,在获取数据上常常采用的是实际车辆行驶数据或模拟驾驶器等仿真装置生成的行驶数据。
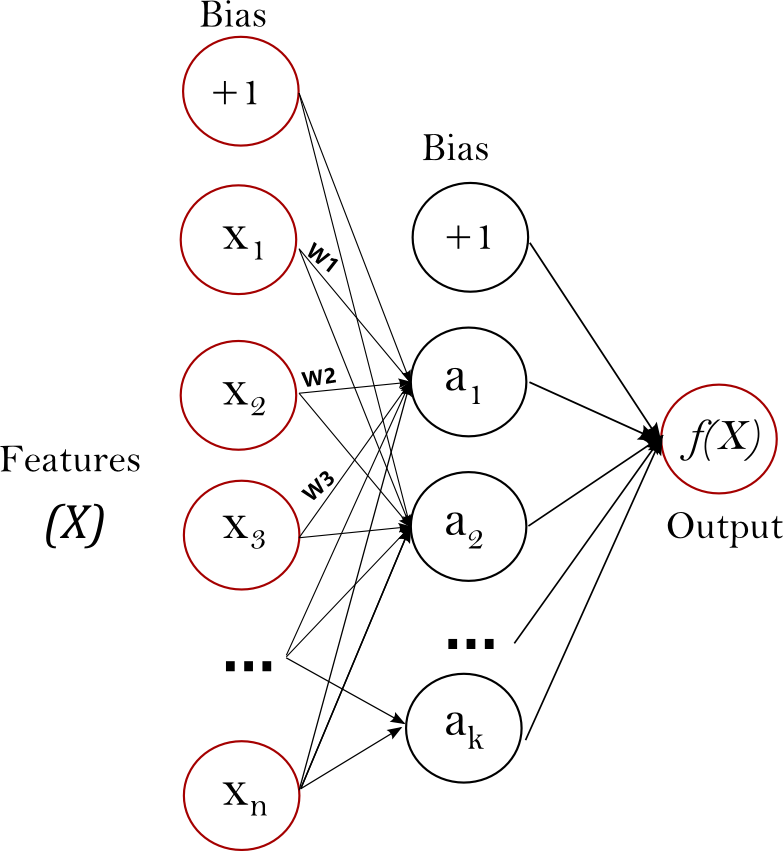
与国外学者的思路类似,国内研究者们在建立车辆驾驶行为分析预测模型时广泛应用了在处理时序数据时表现出色的隐马尔科夫模型,部分学者通过HMM与其他方法组合的新颖算法取得了更好的模型性能。神经网络以其独特非线性映射的能力在驾驶行为识别中也得到了应用,基于统计学习理论的支持向量机在一部分驾驶行为识别的研究中也表现出了优越的性能。
1.2.2国内外文献研究综述
目前国内外对于驾驶行为识别和预测均取得了较多的成果,驾驶行为识别及预测目前运用的方法多种多样,隐马尔可夫模型在处理具有时间序列特征的车辆驾驶行为数据时优势突出,神经网络、支持向量机等算法也展现了巨大的应用价值。在不同的研究中,学者们通常根据自己研究目的对驾驶行为进行人为分类,分类的方法和驾驶行为名称也不尽一致,模型实现的驾驶行为识别准确率也具有差异。
综合来看,目前大多数文献都采取了优先针对个别或部分特定驾驶行为建立分析预测模型的方式,在特定的驾驶行为识别中也往往能取得可靠的准确率,而实现驾驶行为识别模型的实用化,仍然需要将驾驶行为进行更细致更规范的分类,考虑更多的驾驶环境,实现不同驾驶行为的识别;在大多数研究中,驾驶行为识别特征参数主要是来源于车辆本身和驾驶员的数据,对实际驾驶条件下周围其他车辆对本车行驶的影响没有进行充分的考虑,同时要达到更准确的分析预测,还需要在驾驶行为识别时引入能够表征车辆周围交通环境的参数,充分考虑外部环境对车辆驾驶行为的影响。
1.3主要研究内容与技术路线
1.3.1研究内容
本文基于实际车辆行驶数据,对车辆危险驾驶行为进行分类,重点分析危险驾驶行为的特征参数,通过决策树、神经网络和支持向量机算法建立不同的驾驶行为识别模型,对模型进行数据测试,分析不同模型应用于驾驶行为识别预测的优缺点。本文的主要研究内容包括以下几个方面:
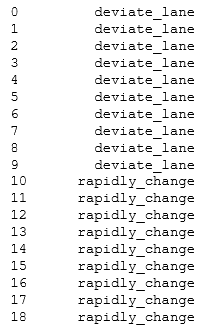
(1)危险驾驶行为分类。本文根据车辆行驶的实际数据,对危险驾驶行为分为超速驾驶行为、偏离车道行为、剧烈变速行为。超速驾驶行为被证实为在许多交通事故中都是主要诱因,也是许多驾驶员在有意无意中经常表现出的危险驾驶行为。偏离车道的驾驶行为干扰了正常的交通秩序,剧烈变速行为不仅是具有安全风险的驾驶行为,还对车辆的行驶部件造成了不必要的损耗。
(2)危险驾驶行为特性分析。超速驾驶行为、偏离车道行为以及剧烈变速驾驶行为是最为常见的危险驾驶行为,大多数交通事故的发生初期都开始于这些简单而常见的具有风险的驾驶行为,不同的驾驶行为在不同的特征参数上具有各自不同的表现显著性。
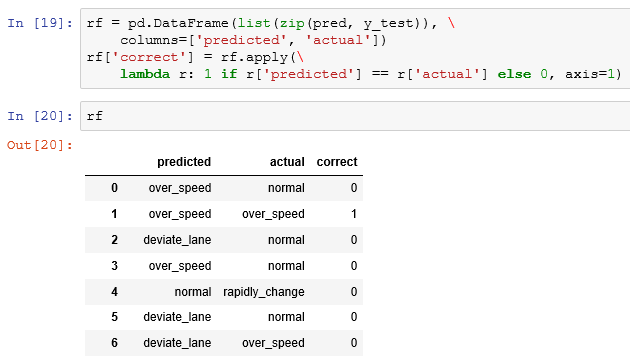
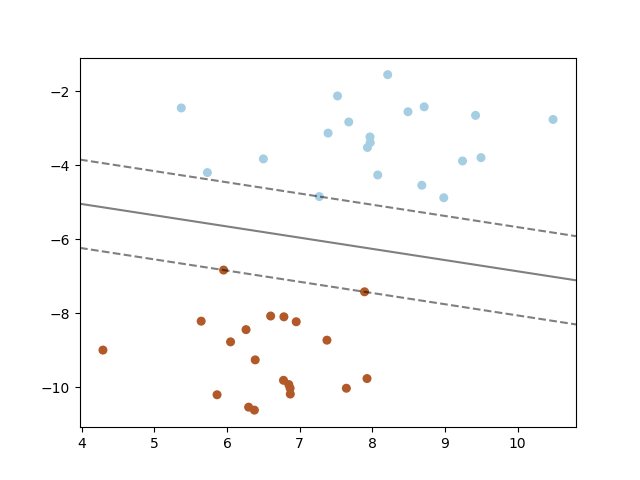
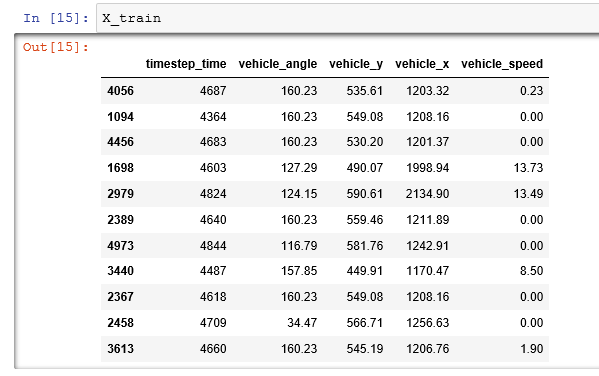
(3)驾驶行为识别预测模型构建。本文中分别采用了决策树、神经网络与支持向量机算法建立驾驶行为识别预测模型,对三种模型进行了算法分析,采用了python支持的scikit-learn算法库进行训练,模型的构建基于相同的训练数据集,以便于三种模型的对比分析。
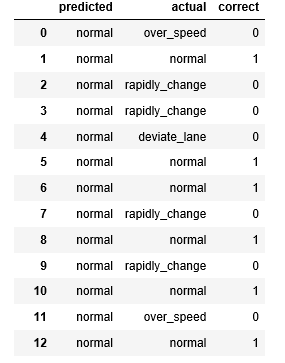
(4)模型测试和评价。在通过不同算法建立驾驶行为识别预测模型的基础上,使用来自相同数据集的相同规模的测试数据对模型的预测准确度进行测试,对三种算法建立的模型性能进行比较,分析模型复杂度、预测准确度、训练模型的成本、模型的泛化性能等。
1.3.2技术路线
本文依托于真实车辆驾驶数据将常见的危险驾驶行为分为超速驾驶行为、偏离车道行为与剧烈变速行为,分析车辆行驶状态在不同危险驾驶行为中的特征参数,通过python语言环境下的scikit-learn机器学习算法库建立危险驾驶行为分析预测模型,比较决策树模型、神经网络模型与支持向量机模型在驾驶行为分析预测中的表现,对训练完成的模型通过joblib保存后在服务器端进行模型部署,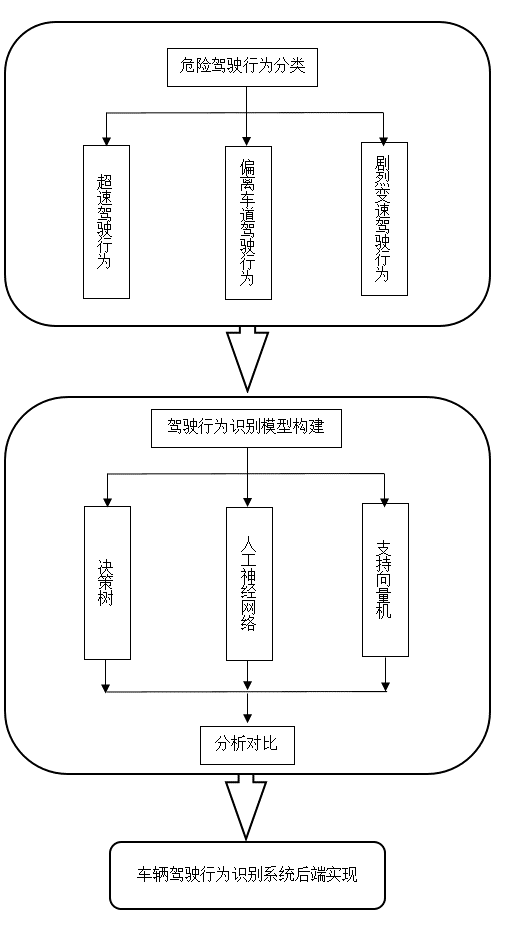 采取python的网络编程技术实现车辆与服务器端的数据交换。
采取python的网络编程技术实现车辆与服务器端的数据交换。
图1.1 技术路线
第2章 危险驾驶行为分类与分析
驾驶行为是驾驶员对车辆行进控制操作的外在表现,当车辆行驶时,驾驶员通过对外界的道路环境和交通环境等信息的感知,对行驶环境的信息进行综合分析然后做出决策,最后通过操作改变驾驶车辆的速度和方向,使车辆按照自己的期望快速通行。在目前,驾驶行为分类没有确定的、权威的标准,大多数研究者倾向于根据自己的研究目的与实际进行分类,在较高层面上可以将驾驶行为分为宏观驾驶行为和微观驾驶行为。疲劳驾驶、酒后驾驶等是常见的宏观驾驶行为,而微观驾驶行为是驾驶员对车辆基本操作的外在表现,宏观驾驶行为往往包含了多种和多次的微观驾驶行为,对微观危险驾驶行为的识别预测有助于及时发现驾驶员的危险驾驶行为,避免造成严重事故。
2.1超速驾驶行为
超速驾驶行为在行车过程中是常见的危险驾驶行为,特别是在没有有效监控路段,驾驶员容易采取过高的驾驶速度。在对超速行为的判别中,瞬时速度参数并不是判断车辆行驶是否超速的标准,违章超速行为在过高速度下行驶的持续时间较长,而非违规超速行为,如正常超车行为持续时间较短,故算法模型经过训练学习的分类规则需要区分两种超速行为,使得算法正常识别驾驶员是否处在违章超速驾驶之中。
在判定行驶的车辆是否超速时,主要的特征参数是车辆在过高速度下驾驶的持续时间。在当前车载卫星定位终端应用的环境下,对车辆行驶中的当前道路有预设的速度阈值,终端对车辆驾驶速度进行实时采样,当检测到采样值 超过时开始对过高速度的持续时间进行计时,为了合理地区分违章的超速驾驶行为和正常的超车行为,需要对的合法时长设定一个合理的阈值,当对的计时超过时车辆被认为产生了违章的超速驾驶行为,终端对车辆驾驶员发出超速报警信息;在对的计时中,在到达阈值之前若车辆驾驶速度降低到以下则暂停对的计时,从行车安全的角度考虑,对于两次间隔时间很短的超速行为合并成一次超速行为可以更好的避免违章超速驾驶行为的发生,因此对连续两次过高速度行驶的合法时间间隔设定一个阈值,在对的计时暂停后,对车速在以下的持续时间进行计时,若在到达之前车辆重新回到过高速度驾驶的状态,则将对的计时恢复并继续判断其是否超过允许的时长,若的计时超过阈值,则对的计时被清零,最近的一次持续的过高速度形式被认为是合法的超速行驶,并且对过高速度持续时间的计时在下次出现过高车速时才被重新触发。
类似的,考虑车辆在不同行驶速度下安全的超速持续时长是不同的,在越高的车速下保证车辆不出现违章的超速驾驶行为需要的计时阈值越短,相比于预设时间阈值的方式,采用预设行驶距离阈值的方式具有更理想的准确性,在合法超车中的超速行驶距离相比于违章的超速驾驶行驶距离通常短得多,采用与测量超速时间判断是否违章的方法类似的流程,将对过高速度持续时间的测量改为对过高速度持续行驶距离的测量并设置合理的阈值,可以得到实用性更好的超速驾驶行为判断方法。
2.2偏离车道行为
相关统计显示统计在大量汽车交通事故中约有50%是由汽车偏离正常的行驶车道引起的,在疲劳驾驶、酒后驾驶等宏观驾驶行为中驾驶员不能正确地操作车辆,往往存在偏离车道的微观驾驶行为。在当前常见的车载车道偏离预警系统之中预防车道偏离行为主要运用了计算机视觉技术,在车辆前端中轴位置装置摄像头,通过摄像头捕捉前方道路的车道示意标记,在图像分析中定位出路面的车道标记线,确定车道相对于行驶车辆的位置,比较行驶车辆中轴线与车道标记线的距离,判断车辆是否偏离了正确的行驶路线,并对偏离车道的驾驶行为发出报警信息。
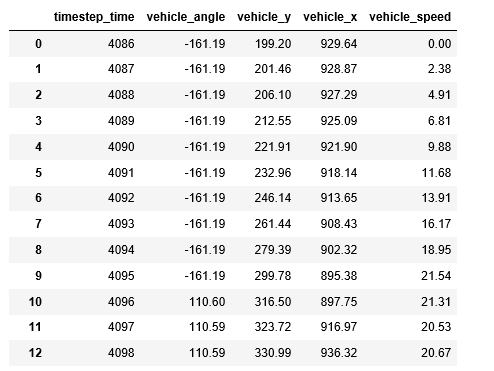
除通过图像数据对偏离车道驾驶行为的进行识别之外,判断车辆是否偏离车道的主要特征参数也可以选择车辆在短时间间隔中在与道路垂直方向上的偏移,即车辆在相对于自身水平的方向上产生的位移是否超过了在正确车道中行驶的正常偏移范围,或转化为车辆在短时间间隔中非直行方向上行驶的距离是否超过了正常行驶中的距离。在普通的驾驶过程中,车辆在一个较短时间内的前进方向是近似于直行的,车辆在水平方向上的位移比较小,当车辆行驶偏离到错误的车道时,车辆在一个较短的时间间隔内产生了较大程度的水平位移,通过对这一数据的判断可以对偏离车道的驾驶行为做出预判。
在具有卫星定位终端的车辆上,可以通过定位数据对车辆的水平位移进行计算,通过对相隔一个短时间间隔的车辆经纬度位置采样可以推出车辆在当前时刻的行驶方向,记此时车辆行驶方向与正北方向的在正方向上的夹角为,同样地,在经过下一个时间间隔后可以得到车辆新的行驶方向为与正北方向的在正方向上的夹角为,从而可以得到行驶车辆在这一段时间内行驶方向的变化为。取、和、为前后两次采集到车辆经纬度的弧度值在已知车辆在这一段时间内的位置变化的情况下可以通过球面上两点距离的计算得出车辆的行驶距离D为
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



