基于自抗扰控制的铁路静止功率调节器毕业论文
2020-03-23 09:31:27
摘 要
当前铁路静止功率调节器在电气化铁路中愈发受到重视。铁路静止功率调节器确保了电力机车能够正常运行,基本消除了由其引发的牵引网系统的电能质量问题。但是,由于电力机车的特殊性,功率调节器的效果不够理想。本文在铁路静止功率调节器的基础上引用了新颖的自抗扰控制理论,并且采用了电压电流双环控制框图,进一步改进了功率调节器。
功率调节器的稳定正常工作的关键,在于确保直流侧电压稳定以及内环电流跟踪性能。一方面,保持直流侧电压稳定工作是非常重要的,将功率调节器的结构、工作原理与能量平衡原则相结合,针对直流侧电压采用新颖的自抗扰控制方法,达到了平稳控制直流侧电压的目的和效果;另一方面,内环电流跟踪的性能对调节器来说也是很关键的,本文在双滞环控制方法的基础上结合了递推积分,这种复合控制方法有效融合了这两种控制方法的性能和特点,完成了这两种控制方法的优势与劣势的互补,电流跟踪的精度和速度得到了很大提升。本文所提出的控制方法,通过大量的仿真与实验,证明了其科学性与正确性,达到了改进功率调节器的控制性能和治理效果的目的,并且牵引供电系统网络的电能质量问题得到了极大的改善。
关键词:电气化铁路;铁路静止功率调节器;电能质量;双滞环控制;递推积分;自抗扰控制
Abstract
At present, railway static power regulator is paid more and more attention in electrified railway.Railway static power regulator ensures the normal operation of electric locomotives and basically eliminates the power quality problem caused by the traction network system.However, due to the particularity of electric locomotive, the regulating effect of power regulator is not ideal.Based on railway static power regulator, this thesis introduces a novel self-anti-disturbance control theory, and uses a voltage and current dual-loop control block diagram to further improve the power regulator.
The key to the stable and normal operation of power regulator is to ensure the stability of dc side voltage and the tracking performance of inner ring current.On the one hand, it is very important to maintain stability of the dc voltage to work, the structure, the working principle of the power regulator combined with energy balance principle, aiming at dc side voltage using novel since the immunity control method, to achieve the purpose and effect of the steady control of dc side voltage;Inner ring, on the other hand, the current tracking performance is a key for the regulator, based on the double hysteresis control method combines recursive integral, on the basis of the compound control method effectively combines the performance and characteristics of the two control methods, to complete the two control methods of complementary advantages and disadvantages, the current tracking precision and speed greatly ascend.In this thesis, the proposed control method, through a lot of simulation and experiment, and proved its scientific nature and validity, to improve power regulator control performance and governance effect, the purpose of the network and traction power supply system of power quality problems are improved greatly.
Key words: electrified railways; railway static power regulator; power quality; double-hysteresis control; recursive integration; ADRC
目录
摘要 1
Abstract 2
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 综合治理电气化铁路电能质量的现状 2
1.3 本文主要研究内容 2
第2章 铁路静止功率调节器的结构与控制策略 3
2.1 RPC的拓扑结构 3
2.2 RPC的控制策略 4
2.3 本章小结 4
第3章 基于递推积分的双滞环电流复合控制方法 5
3.1滞环电流控制策略 5
3.1.1 基于电压矢量的滞环电流PWM控制的实现 6
3.1.2 双滞环电流的控制策略 9
3.2 递推积分PI控制方法 10
3.3 本章小结 12
第4章 自抗扰控制研究 13
4.1 传统 PID 控制器的优缺点 13
4.2 跟踪微分器 15
4.3 扩张状态观测器原理 17
4.4 状态误差反馈 18
4.5 自抗扰控制器的总体结构 19
4.6 本章小结 20
第5章 基于自抗扰控制的双滞环控制方法设计 21
5.1 综合补偿控制图 21
5.2 直流侧采用自抗扰控制方法 21
5.3 基于递推积分的双滞环电流控制方法 24
5.4 本章小结 27
第6章 论文仿真 29
6.1 内环电流的仿真 29
6.2 直流侧电压的仿真 31
第7章 结论 33
参考文献 34
致谢 36
第1章 绪论
1.1 课题研究背景及意义
最近几十年间,我国经济的高速发展给电力机车的迅猛发展提供了机会。作为一种全新的铁路运输方式,电力机车有诸多的优点,牵引装载大、牵引速度快、环保无污染且能源利用率高。目前电气化铁路发展势头良好,大力发展电气化铁路是当前所必须的,发展前景十分看好。
但是电气化铁路在运行中产生了很多问题,给电力系统和电网用户造成了很大影响。由于电力机车的负载性质很特殊。其牵引电网[1] 存在一些不理想之处,影响了公共电网的电能质量[2]。
(1)电流谐波含量较高。电力机车需要经过其牵引系统连接到公共电网,并且受控相位整流器技术用于功率输入部分。电能经过降压变压器传递至电力机车,而大量的谐波电流将被馈入到电车牵引供电网络中,使得电气设备无法正常工作,电气元件出现其他额外损耗,导致谐波过电流,甚至导致自动装置与继电保护的失误,从而导致设备损坏,线路损坏和其他恶性事件。而且由于其接触网与牵引网的电压水平、布线、比例参数等不同,加大了电气化铁路谐波的复杂性。
(2)功率因数偏低。牵引负载电流相角大小与工作状况息息相关,工作状况改变,相角也会相应地产生很大的变化,那么这就会造成电力机车平均功率因素偏低。电力机车为AC-DC型时,,功率因数比较低。除此之外,牵引网上存在阻抗,使得牵引网上的负载有功损耗和无功损耗的比值小于1,所以功率因数在原有基础上减去0.01~0.05。而且,牵引站110KV侧的变压器不是理想变压器,那么功率因数还要减小0.05。在AC-DC-AC型电力机车中,较前者有了较大提升,功率因数有所提高。功率因数对电气化铁路的稳定工作与安全行车[3]有着很大影响。功率因数偏低妨碍了电气化铁路的稳定工作与安全行车。
(3)电压波动大。国内外许多有关文献和参考资料都显示,电力机车的类型与牵引重量,或机车行驶速度这些内因影响着电气化铁路,使电力负荷存在随机波动的现象,当然也与外在因素有关,比如自然天气、轨道状况等等外因。随机波动导致牵引负荷在空间与时间上的分布呈现不均匀性、波动性很强的现象[4,5]。这种现象将带来大量无功冲击,让电压波动很剧烈,使综合治理电气化铁路的电能质量加大了难度。当前,国内的电气化铁路的负荷很大,高达80MVA,未来负荷将达到120MVA,并且电气化铁路在建设的时候考虑过载能力为最大容量的一倍。所以最大负荷可高达160-240MVA[6]。由于一些地区电网相对较弱,大负荷将导致电压快速起伏与波动等问题。
(4)负序电流严重。当与三相对称的电网连接时,拓扑结构的不对称,将会导致牵引变压器系统侧有幅值比较大的负序电流产生。不同的变压器连接方法会导致负序电流[7,8]也不同。三相不平衡负载与变压器能量损耗增加、铁芯磁路发热加剧以及电力变压器容量利用率下降等现象息息相关。
1.2 综合治理电气化铁路电能质量的现状
当今社会科技和工业高速发展,社会愈发重视和关注电能质量。然而电能作为一种特殊产品,需要通过供、用电双方来共同确保其质量,与双方利益密切相关 [9,10]。所以,如何抑制谐波与负序等故障电流注入牵引电网,解决电车牵引网不够稳定的问题,需要我们深层次地研究电车牵引网以及解决电能质量问题。
近年来,国外一些国家对此进行了研究,德国、澳大利亚、日本等国家构造并采用了铁路静止功率调节器[11],(英文:Railway SaticPower conditioner,简称:RPC),是一种新颖的柔性变电装置,通过RPC来整体补偿电气化铁路中产生的谐波和负序 [12,13] 。很大程度上化解了其带来的电能质量问题。RPC的拓扑结构、补偿原理方面及其信号检测方法 ,在一些参考资料和相关文献[14,15]中作了详细分析。但是,RPC是否能够达到预期效果,除了按照工作原理合理设计主电路外,控制方法的科学性与合理性也是很重要的,但是目前对RPC的技术不够成熟。
1.3 本文主要研究内容
通过学习RPC的相关知识后,本文将RPC与一种新的双环控制方法相结合。
对于直流侧电压方面,平稳工作和关键。将功率调节器的结构、工作原理与能量平衡原则相结合,针对直流侧电压采用新颖的自抗扰控制方法,达到了平稳控制直流侧电压的目的和效果。
对于电流跟踪方面,无差和快速是非常关键的,所以递推积分与双滞环控制相结合的复合控制方法就应运而生了。递推积分的优势是无差特性[16],劣势是调节时间长;双滞环控制的优势是快速特性[17],劣势是误差较大。复合控制使得这两种控制方法优势相结合,克服了彼此的劣势,有机巧妙地结合到一起。经过研究,在双滞环控制的基础上结合递推积分的复合控制方法,合理地利用这两种方法的优势,使得内环电流快速无差跟踪。为了使得递推积分达到最佳的控制效果,通过工程方法,合理地对控制器参数实行三阶最佳整定。
第2章 铁路静止功率调节器的结构与控制策略
2.1 RPC的拓扑结构
图2.1 为SCOTT牵引机构的综合补偿系统构照图。SCOTT变压器有很多优势:容量利用率高、结构简明并且能够有效地抑制负序电流含量,维持三相平衡稳定等,在国内电气化铁路中的电车牵引供电系统中运用广泛。如图2.1所示,牵引供电臂有左右两侧,那么右侧为相,左侧为相,相电流为,相电流为。SCOTT变压器的、、为220kV电网电流。
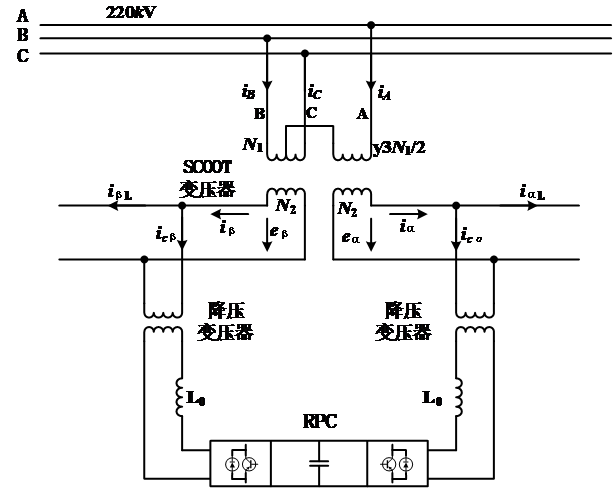
图2.1 SCOOT牵引系统结构图
三相电压经过三相SCOTT 降压变压器,降压成单相电压,实现对两供电臂机车的供电。中间的DC电容与两边相对的变流器相连接,共同构造成RPC,RPC与两侧供电臂相连接的枢纽是位于两侧的降压变压器。因此只要应用合理的控制方法,应用两侧背靠背相对的逆变器,实现牵引系统有功功率的有效转移,而且也能实现各自补偿谐波和无功。
2.2 RPC的控制策略
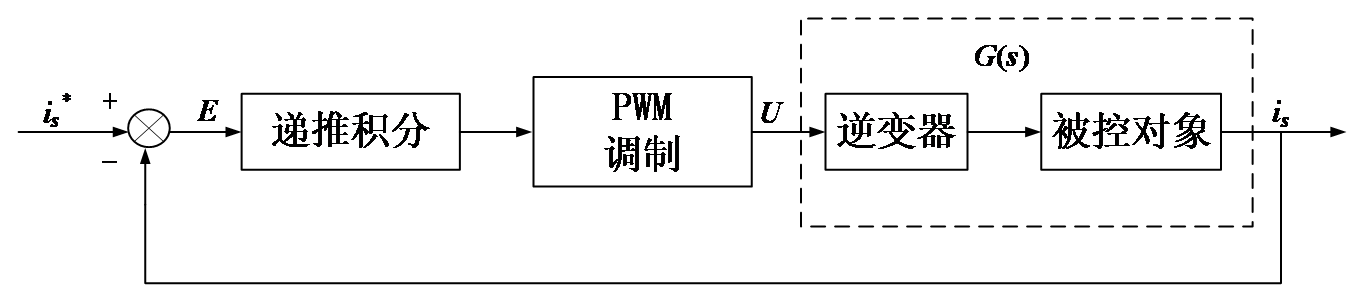
将RPC与一种新的电压电流双环控制相结合。一方面直流侧电压平稳工作很关键,将功率调节器的构造、工作原理与功率平衡原则相结合,提出一种新的自抗扰控制方法,使得直流侧电压能够平稳;另一方面,内环电流跟踪的性能对调节器来说也是很关键的,本文在双滞环控制方法的基础上结合了递推积分,这种复合控制方法吸纳了这两种控制方法的特性,完成了这两种控制方法的优势与劣势的互补,提升了电流跟踪的精度和速度。本文将对自抗扰控制、递推积分控制以及双滞环控制进行研究,将其与RPC相结合,改进功率调节器。
2.3 本章小结
本文将RPC与一种新的电压电流双环控制相结合。将对自抗扰控制、递推积分控制以及双滞环控制进行研究,将其与RPC相结合,改进功率调节器。
第3章 基于递推积分的双滞环电流复合控制方法
在电流控制方法中,滞环控制比较普遍,其快速响应且精度较高的优点使得其深受欢迎,但是仍需要改进,无法对设定信号进行无静差跟踪,波动较大。本文采用了双滞环控制技术,利用内外滞环有效地改善了波形,但是依然属于有静差控制。除此之外,本文还进行了改进,提出了基于电压矢量控制的双滞环电流控制,提高了消除误差的性能,但稳态误差依然存在,需要进一步处理。
按照控制方法的惯例,拥有积分模块的控制器不但可以消除误差,而且还能实现无静差控制。传统PI控制方法是对每一个采样点进行逐点积分计算,参考信号是一个直流信号或者其他变化过程很缓慢的输入量时,传统PI控制器尚且可以实现无静差控制,系统输出没有稳态误差。但是当参考信号是频率为n倍50HZ的多种谐波信号叠加起来的正弦波,那么传统的PI控制就会出现稳态误差。本文采用的递推积分控制方法不但算法简单,而且稳定不存在波动。
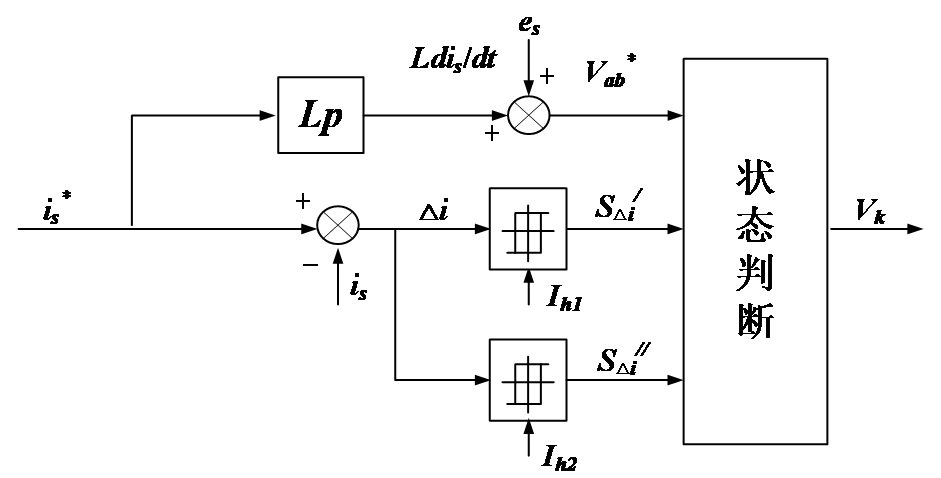
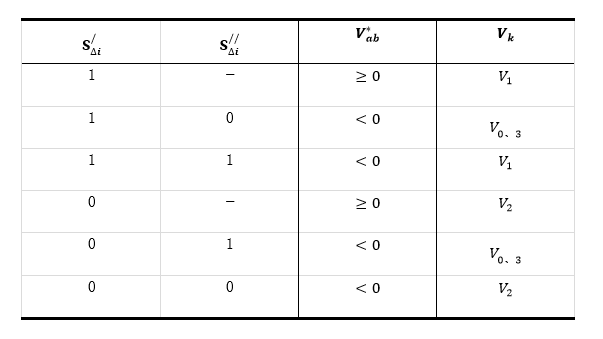
在双滞环控制方法的理论上结合递推积分控制方法,这种方法能够有效地处理。当较大时,采用双滞环电流控制方法。其中,大于外环设定值时,内环和外环都起作用,这样误差电流不会继续增大,而是减小;大于内环设定值,但小于外环设定值时,只有内环起作用,外环不作用,可以快速减小电流误差以及其所带来的损耗。当较小时,小于内环设定值,那么采用递推积分控制方式,可以实现无静差控制,使得误差电流减小至0,且很稳定。
3.1滞环电流控制策略
滞环电流控制策略,主要目的是抑制误差电流的增大,并且尽可能地减少由其带来的损耗等问题。控制系统中含有多种供电方式,分为单相转变成三相对称供电模式和三相转变成单相平衡补偿供电模式,均含有电流整流器模块,其电流整流器模块需要承担多种功能,实现传递有功功率,以及抑制和补偿线路中的无功和谐波分量的目标。
上述结构是由位于直流电容两侧的两个单相变流器背向构成,它们之间相互独立,可以单独进行控制。因此在控制策略上,一个单相变流器可以近似看作成对一个单相PWM整流器(VSR)的控制。如图3.1为其结构图。在这个拓扑结构中,设定其直流侧的电压值是不变的,已知输出的参考电流信号为。
根据电压矢量控制与滞环控制的特性,提出在后者的基础上结合前者的复合控制方法。该复合控制方法在单相系统[18,19]中合理运用。这个方法结合了二者的优点,不但可以限制误差电流,而且可以降低开关频率。
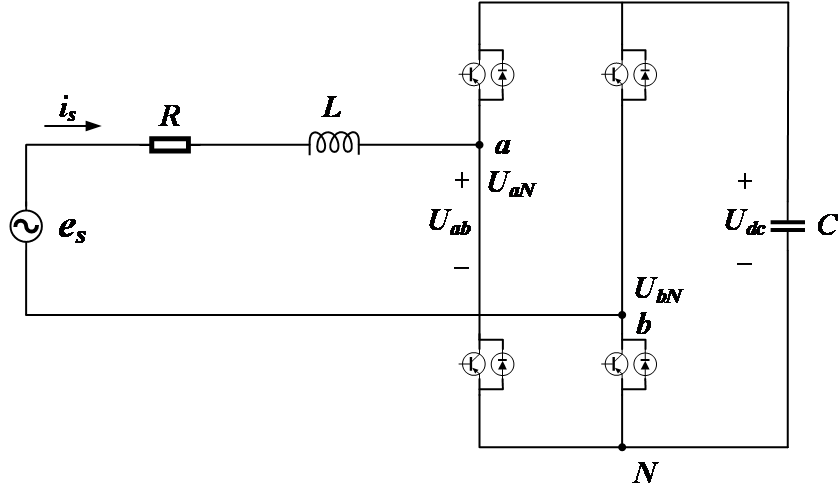
图3.1 单相VSR的拓扑结构
3.1.1 基于电压矢量的滞环电流PWM控制的实现
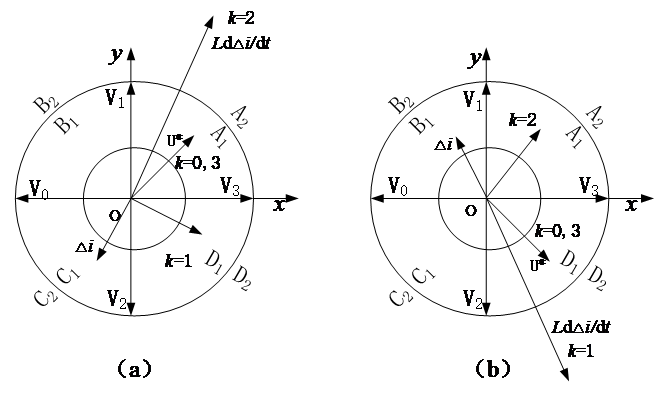
图3.1以直流电压参考点N为参考电压,每个桥臂相对于N点输出两种电压矢量,分别为、,且、有两种电压值,值为、 0。所以,想减后得:
(3.1)
下式为两桥臂的单极性逻辑开关函数
(3.2)
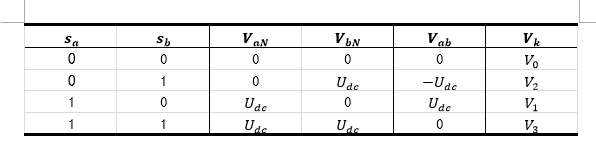
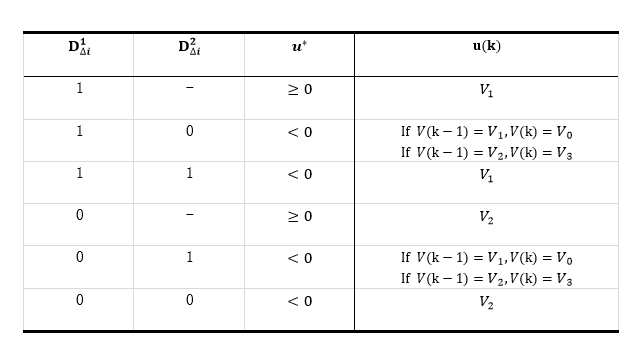
表3.1记录了所有的可能的情况以及对应的电压值(、、、)。
表3.1 两桥臂变流器开关函数及其电压组合
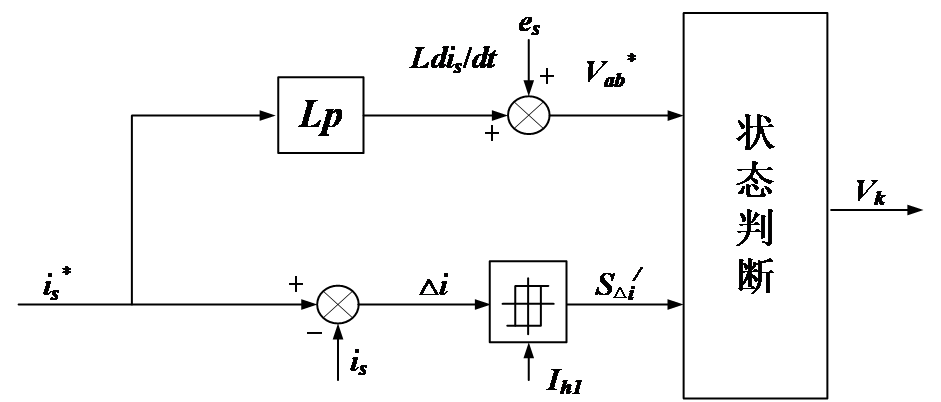
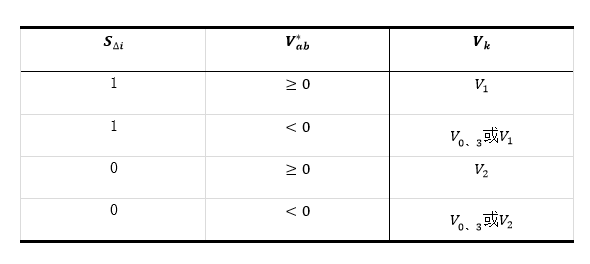
在滞环电流控制的理论上结合电压矢量控制的复合控制方法,可以根据实际情况输出相应的电压值,保证电流误差在一个设定值内,这样可以保证控制电流的在理想范围内。
已知的设定电流为,且实际电流为,在一定精度内,通过比较实际电流与设定电流得到。
(3.3)
由图3.1的拓扑结构可知,电压回路方程为
(3.4)
式中一一变流器交流侧输出电压;
一一变流器输出电流;
一一交流电源。
因为交流侧电阻R的值较小,所以忽略不计,上式可以改为
(3.5)
将代入式,可得
(3.6)
式(3.6)显示:的变化率与很多因素有关,比如实际电源的电压值、参考电流值的变化率以及电压。要想使得电流误差为0,就必须满足以下关系:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



