多目标电流的研究与设计外文翻译资料
2021-12-17 22:36:49
英语原文共 7 页
2014年0届国际电机与系统会议 (icems), 2014年10月22-25日, 中国杭州
多目标电流的研究与设计
级联 H 桥静态叶片发电机的跟踪控制策略
于延南1, 2, 徐电国1, 吴健1, 徐荣1, 于勇1,荣峰1, 严继一1
1中国哈尔滨工业大学电气工程与自动化学院,哈尔滨工业大学电气与控制工程学院
2
中国黑龙江科技大学电气与控制工程学院
电子邮件: yyannan@126.com
摘要--本文介绍了一种改进的级联H桥静态无级量发生器(SVG) 电流跟踪控制策略。这种控制策略不仅可以提高动态响应速度和电能质量, 还可以提高电网的可靠性。分析了无功补偿的工作原理, 建立了级联H桥SVG的数学模型,该模型是离散的离散数学模型。构造了离散时间静态观测器和一个提出了证明的目前的控制策略。通过比较死区控制和电流前馈耦合控制,该死区控制具有多目标的优点。通过对一个10kv2mvar无功补偿系统的试验,验证了死拍电流跟踪控制的优越性。仿真和实验结果表明,该控制策略可以提高波形的动态性能和正弦度。
第一。.简介
由于绿色电力越来越受到重视,电力质量也越来越重要。由于使用了大量的非线性负载和端子,电能质量不能满足要求。为了提高电能质量和净化电网电力,主要方法是使用几种动态无功补偿装置和有源电力滤波器。在所有的措施中, 级联H桥SVG已成为主流,对它的研究得到了广泛的关注和讨论 [1].
SVG的特点是整体损耗低、动态响应快、谐波电流低、储能装置小、成本低。级联 H桥 SVG 的优点是模块化拓扑, 即需要级别的数量通过更改,可以通过添加与每个阶段连续连接的完全相同数量的电源单元来实现。级联H桥SVG采用模块化设计,具有较好的安装能力和可维护性。此外,当输出与其他手段相比,级联H桥SVG保持的组件较少,谐波电流更少, 成本更低 [2-3]。
|
本论文由国家自然科学青年基金会(项目编号:51407043)、电力电子科学与教育资助 三角洲环境与教育基金会(dreg2014015)和黑龙江教育d发展计划科学和技术研究 (项目编号: 12531594)。 978-1-4799-542-8/14/$31.00 copy;2014 ieee |
当前控制策略是决定SVG静态和动态性能的关键。SVG 的电流控制方法包括三角形波比较、滞后控制、电流前馈解耦控制、重复控制、滑模变结构控制、模糊控制、神经网络控制、专家控制系统、拍控制和死拍控制。由于系统控制目标的不同,将不同的方法混合起来,以获得互补的优势,并提出了一些复杂的控制方法 [4-10]。
三角波比较控制策略存在相位角误差。虽然滞后控制的动态性能较好,但其过宽的开关频率范围已成为级联h桥拓扑[11]应用的最大障碍。然而,PI调节器的延迟是三角波比较控制和滞后控制的一个常见缺点。不同电路参数的影响带来了控制不正确的问题。电流前馈解耦控制在抑制谐波时,会使动态响应速度变慢[2,12]。滑模变结构控制具有鲁棒性强、响应速度快等优点,但采用这种方法补偿后,电源电流中含有较高的谐波。
死拍控制可与载波相移脉宽调制(cpsPWM)技术相结合在级联H桥SVG中的应用。它使整个系统具有快速的动态响应和确认的频率。死拍控制是一种数学控制策略,跟踪精度高, 动态响应快 [3, 13-18].
在参考[3]的基础上,设计了一种新的死拍控制策略,并与模型预测控制相结合。该控制可以实现SVG系统中直流电容的平衡。它还可以降低开关损耗,使系统具有较宽的带宽。控制计算简单。在参考[13]中,通过在切换周期的中间时刻采样得到新的输出变量,并对观测器误差进行校正。该方法消除了时延的干扰,既提高了系统的稳定性,又充分实现了电流环的无差拍控制。但是控制策略很复杂,使得计算量更大。在参考[14]中,该方法采用重复控制来预测电网未来两个控制周期的平均电压,以获得较好的动态控制效果。该控制条件受电网电压畸变影响。但本文没有考虑电网电压的畸变。在参考[17]中,这种死拍控制不受源电压畸变的影响。但这种控制受开关频率的影响很大。如果频率很低,电流波形的影响就不好。
本文提出了一种基于瞬时功率理论的死拍控制方法。首先,分析了无功补偿的原理。建立了级联H桥的数学模型。那么它在数学上就是离散的。然后推导了一种新的死拍控制策略。该控制可以使补偿电流很好地跟踪电流命令。控制效果不受源电压畸变的影响。实际THD很小,精度很高。它还可以减少总损失。在基本无差拍控制策略中加入预测因子,避免了由于耦合电路参数的影响而导致参数之间的相互影响。给出了基于该控制策略的仿真和实验结果。其稳定性和动态性能良好。
第二。 系统结构及原理
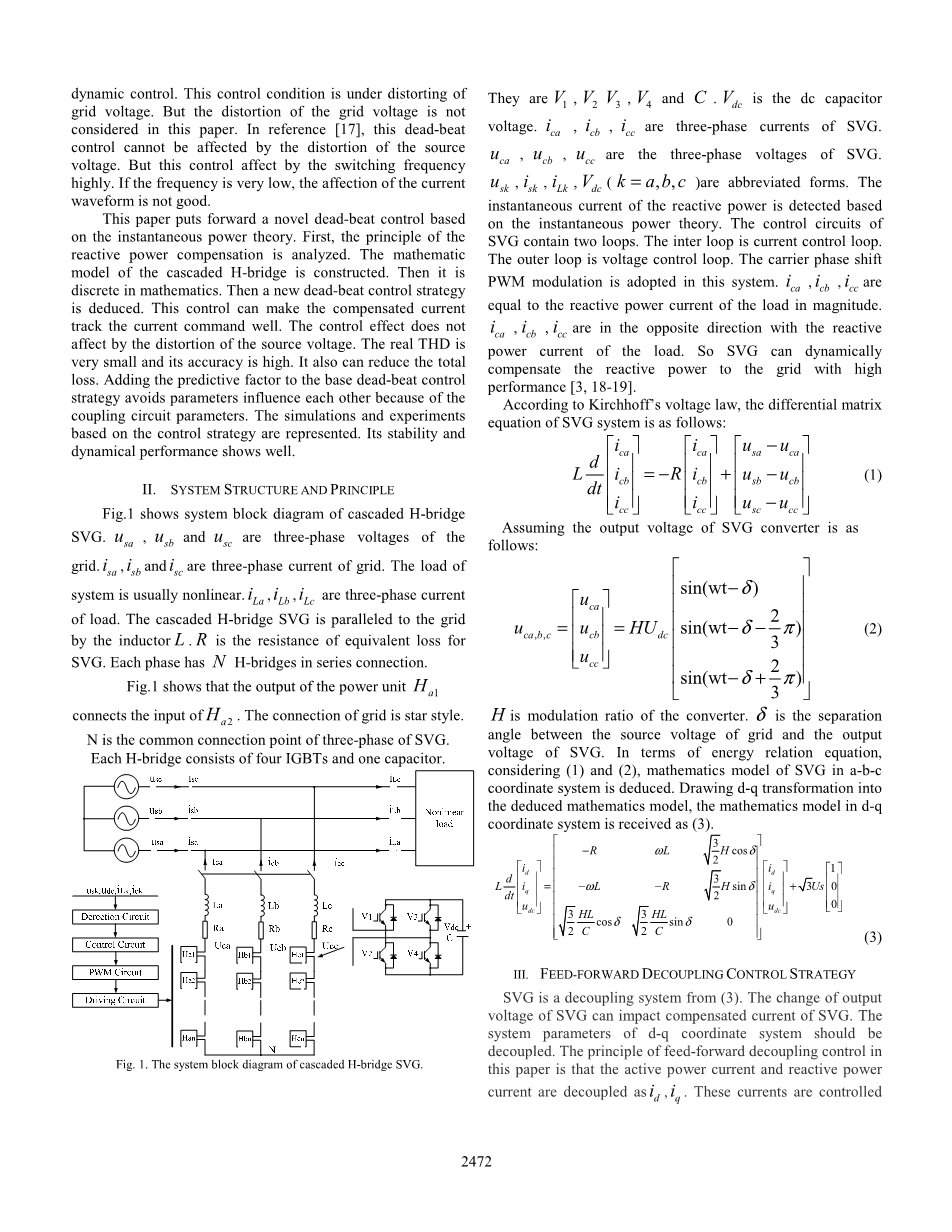
图1显示了级联 H 桥 SVG 的系统框图。,和 是电网的三相电压。,和是电网的三相电流。系统的负载通常是非线性的。,,是负载的三相电流。级联H桥SVG通过电感L与电网并联。R是SVG等效损耗的电阻。每相串联N个H桥。
图1显示了功率单元HA1的输出连接HA2的输入。n 是 SVG三相的共同连接点。每个H桥由四个igbt和一个电容器组成。
图1。级联H桥SVG系统框图。
它们是、、 、和。
是直流电容器电压。。,和是SVG的三相电流。,和是 SVG 的三相电压。,和,(k=a,b,c)是缩写形式。在瞬时功率的基础上检测无功功率的瞬时电流。SVG的控制电路包含两个回路。内部回路是电流控制回路。外部回路是电压控制回路。该系统采用载波相移PWM 调制。,和等于负载的无功功率电流的大小。
,和与负载的无功功率电流相反。因此,SVG可以动态补偿电网的无功功率,具有较高的性能[3, 18-19].
根据基什霍夫的电压定律, SVG 系统的微分矩阵方程如下:
(1)
假设 SVG 转换器的输出电压如下所示:
(2)
H是转换器的调制比。delta;是电网源电压与SVG输出电压的分离角。在能量关系方程方面, 考虑 (1) 和 (2), 推导了 a-b-c坐标系中SVG的数学模型。将dq变换绘制为推导出的数学模型,得到了dq坐标系中的数学模型 (3)。
(3)
第三。前馈解耦控制策略
SVG是一个从(3)解耦系统。SVG输出电压的变化会影响SVG的补偿电流。dq坐标系的系统参数应解耦。本文的前馈解耦控制的原理是电源电流和无功功率电流被解耦为,.这些电流是单独控制的。是决定 SVG 直流电容电压的有源元件。是在SVG 和网格之间流动的反应分量电流。本文改进了经典的前馈解耦电流控制策略,增加了阻力因子,使控制性能得到提高。图2显示了块 d一种新型前馈解耦电流控制 [20]。
图2。一种新型前馈解耦电流控制的框图
图2显示了该系统中的两个循环。它们是外部电压和内部电流回路。电压回路公司电压。总直流电容电压的参考值之间的差异和实际的电容器电压是 PI_1 控制器的输入。PI控制器的输出电流是有源电源电流参考值。SVG 的三相电流转化为瞬时电流和通过 d-q 转换。
然后,这些命令分别与它们的瞬时电流值进行比较。命令和瞬时电流之间的差异是输入 PI_2 或 PI_3。因为电流或的存在,这种差异增加了电感中的解耦电压。为了提高控制精度,在PI_2或PI_3的输入中加入了电阻因子。然后是SVG的输出电压命令,是通过两个加法器计算的。这两个参考电压反向转换为三相电压参考值,,些信号转化为 PWM控制信号驱动SVG的电源开关[2,12,20]。 这种解耦电流控制有一个问题,即有三个PI控制器和一个直流电压控制器。这可能会影响系统的动态速度。SVG的输出电流缓慢地跟随当前命令。电压回路和电流回路之间的PI参数相互影响。与 d-q 坐标系的解耦是局部的。如果d-q 坐标系完全解耦,系统不可能稳定。第五部分介绍了解耦电流控制的仿真和实验。在将解耦电流控制与一种新型的无差拍控制进行了比较。
四。 一种新的死区电流控制策略
无差拍原理是利用带电流误差的电压回路方程计算SVG的三相电压基准。然后三角载波与1kHz由每个相位的调制比生成。通过在 d-q 坐标系中变换(3), 控制电压矩阵方程如下:
(4)
,是 d-q 坐标系中 SVG 的瞬时补偿电流。,是 SVG 的有功和无功电压。,是电网电压命令。从 (4) 推导出的离散方程是:
(5)
SVG 在时刻的输出电压指令是通过采样,,计算的。无差拍电流控制由于数学控制的存在而导致数学系统的滞后。计算电压指令的时刻实际上滞后于采样时刻一个开关周期。因此, 时刻的电压值令是通过采样时刻的电压计算的。然后 (5) 被推断为 (6) [11, 18, 21-22]。
(6)
构造离散时间状态观测器。的电流采样用于预测时的指令电流.公式 (1) 转换为 (7), 如下所示:
(7)
将方程(7)进行dq变换,使其具有dq坐标下的数学模型。派生过程如下所示:
(8)
根据 d-q 变换的定义, (8) 改为 (9)。
(9)
公式 (9) 更改为 (10)。
(10)
根据工程,方程式(10)离散为(11)连续时间系统的离散方法。
(11)
方程 (11) 改为 SVG [18] 的离散时间数学模型。
(12)
SVG的输出电流设置为状态变量。SVG离散时间数学模型如下:
(13)
比较 (12) 和 (13), (14) 实现。
,
, ,
(14)
基于 SVG 的状态可控性, 建立了离散时间状态观测器。
^ ^ ^
(15)
公式 (13) 被拖入公式 (15)。
^ ^
^ (16)
在 (16) 中,是离散时间状态观测器的状态变量。是观察者的输出变量。是观察者的误差反馈矩阵。设置得出观测器的误差反馈矩阵。根据对线性系统的稳定性理论, 对于预测误差为零, 最后, (17) 如下:
(17)
SVG 的电压方程是:
^
(18)
在经典的无差拍电流控制中加入了无差拍控制的预测因子。理想因素是通过许多模拟得到的。是时的电压指令。是切换时间。是时刻瞬时电流指令。是时刻的电流。是介于和中间时刻的瞬时电压
是介于和中间时刻的瞬时电压.本文提出的电流环离散状态观测器的死区控制结构如图3所示
图3。离散状态观测器的无差拍控制结构
在经典死拍电流控制的基础上,对新型死拍控制进行了改进。它可以实现多目标控制。它是使无功电流很好地跟随电流命令。死拍控制的另一个目标是减少转换器的损耗。在测试中,THD被这个控件减少。此外,这种死拍控制使SVG具有广泛的带宽。最重要的是,此控件只关心当前采样值。这极大地提高了动态性能。它还可以缩短计算时间和计算量。
五。 模拟与实验结果
在MATLAB仿真条件下建立了SVG 仿真模型用于验证控制方法的正确性和高性能。仿真参数如下所示。每个阶段有三个H桥动力装置。网格频率为50Hz。总功率单元的直流电压基准为350v。等效损耗的电阻为5Omega;.
A. 解耦电流控制仿真
为了验证改进的解耦电流控制策略,系统负载为有功负载和无功负载。
图4。解耦电流控制中SVG实际有功电流和有功电流指令的波形
图4显示解耦电流控制中SVG的实际有源电流和活动电流指令。图4显示了是小的。1.5秒后, 瞬时活动电流很好地跟随当前命令。调整时间比死拍电流控制长。
图5显示了解耦电流控制中SVG的实际无功电流和无功电流指令的波形。为了反映遵循反应命令的性能,对负载条件的变化进行了仿真。
当时间为0到0.3时,有源功率负载为100kw。工作频率为50Hz。当时间为0.3至1秒时,有功功率负载为500kw,电容无功功率为300kvar。即使负
资料编号:[4660]
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



