300X72型仓库堆垛机行走机构及旋转机构的设计毕业论文
2020-04-15 18:04:32
摘 要
本文首先对自动化立体仓库进行了介绍;并根据课题要求仓库所需容量,对堆垛机进行初步设计,堆垛机根据所需运动方向可以分为行走机构,旋转机构,升降机构以及伸缩机构,本论文涉及的是行走机构和旋转机构的传动部件及导轨的设计以及电动机的选择;完成计算说明书后运用三维建模软件proe,完成各个零件的建模并装配,并进行运动仿真。
文中涵盖了行走机构和旋转机构的主要传动件的机械设计过程,主要包括齿轮,齿条,蜗杆蜗轮,并进行了轴的结构设计以及键链接的强度校核,讲述了主要零部件的建模和装配的方法,叙述了如何在proe中进行机构运动分析并将结果录制的过程;最后对本次设计还存在的问题进行总结,并进行经济分析,同时对该设计产品进行展望
关键词:自动化立体仓库 堆垛机 行走机构 旋转机构 建模
The design of Running Mechanism and Rotation Mechanism for Retrieval in Automatic Warehouse
Abstract
First,the AS/RS is briefly introduced about its characteristics and development, then according to the capacity required in the subject, the stacker is initially designed ,including transmission mechanism in different directions, track and the choice of motor. After the calculation, the model of designed component was produced and assembled in Pro-e, which is convenient for later simulation.
In this report, the process of designing for mechanism will be explained, the components being designed contain gears, shafts, worm and worm gears, in addition, the ways of modeling and assembling will also be illustrated. In the end, conclusion, economic analysis and expectation to this product will be made.
Key Words: AS/RS; stacker; transmission mechanism
目 录
摘 要 I
Abstract II
目 录 III
第一章 引言 1
1.1 自动化立体仓库概述 1
1.2 自动化立体仓库的特点 1
1.2.1 自动化立体仓库的优点 1
1.2.2 自动化立体仓库的缺点 2
1.3 自动化立体仓库的发展 2
第二章 总体设计 3
2.1 设计内容概述 3
2.2 方案介绍 3
2.2.1 行走机构的方案 3
2.2.2 旋转机构的方案 4
第三章 行走机构的设计 5
3.1 计算传动装置总效率 5
3.2 电动机的选择 5
3.2.1电动机的选择 5
3.2.2确定传动装置的传动比 6
3.3计算传动装置的运动和动力参数 6
3.4 蜗杆传动的设计计算 7
3.4.1 选精度等级、材料 7
3.4.2按接触疲劳强度设计 8
3.4.3几何尺寸计算 8
3.4.4蜗杆传动效率 8
3.4.5 蜗杆的热平衡计算 9
3.5 齿条传动的设计 11
3.5.1 选精度等级、材料及齿数 11
3.5.2按齿根弯曲疲劳强度设计 11
3.5.3几何尺寸计算 14
3.5.4 校核接触疲劳强度 14
3.5.5 主要设计结论 16
3.6 轴和轴承的选择及结构设计 16
3.6.1 轴的材料选择及最小直径的估算 16
3.6.2 输入轴的结构设计 17
3.7 键联接的选择及校核计算 20
3.7.1 输入轴键选择与校核 20
3.7.2 输出轴键选择与校核 21
第四章 旋转机构的设计 22
4.1 计算传动装置总效率 22
4.2电动机的选择 22
4.2.1 电动机的选择 22
4.2.2 分配传动比 23
4.3 计算传动装置的运动和动力参数 23
4.4 一级减速箱的设计计算 24
4.4.1 选精度等级,材料 24
4.4.2按齿面接触强度设计 25
4.4.3 几何尺寸计算 27
4.4.4 按齿根弯曲强度校核 27
4.4.5几何尺寸计算 29
4.5 蜗轮蜗杆的设计 29
4.5.1 选精度等级、材料 29
4.5.2按接触疲劳强度设计 29
4.5.3 几何尺寸计算 30
4.5.4 蜗杆传动效率 30
4.5.5 蜗杆的热平衡计算 32
4.6 轴和轴承的选择及结构设计 32
4.6.1 轴的材料选择及最小直径的估算 32
4.6.2 减速箱输入轴的结构设计 33
4.6.3 减速箱输出轴的结构设计 34
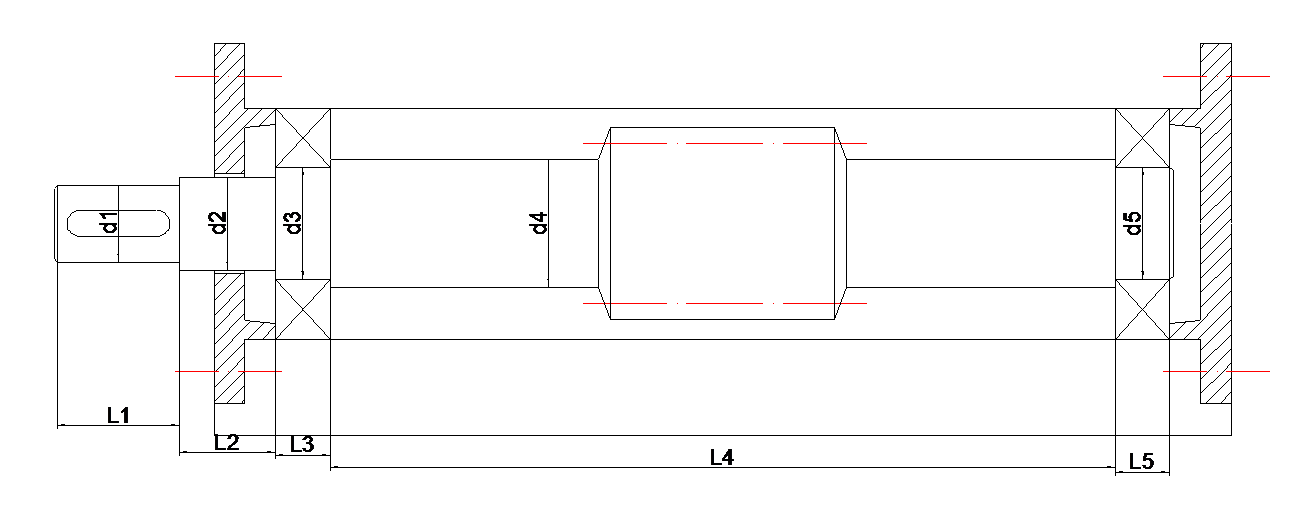
4.6.4 蜗杆轴的结构设计 36
4.6.5 蜗轮轴的结构设计 38
4.7 键连接的选择及校核计算 39
4.7.1减速箱输入轴键选择与校核 39
4.7.2 减速箱输出轴键选择与校核 40
4.7.3 蜗杆轴上的键选择与校核 40
4.7.4 蜗轮轴上的键选择与校核 41
第五章 机构的三维建模 42
5.1 PRO-E介绍 42
5.2 旋转机构零件的三维建模与装配 42
5.2.1 关键零件的建模 42
5.2.2 其他零件的建模 47
5.2.3 旋转机构的装配 51
5.3 行走机构零件的三维建模与装配 52
5.3.1 关键零件的建模 52
5.3.2 其他零件的建模 53
5.3.3 行走机构的装配 55
5.4 运动仿真 57
5.4.1 拖动元件记录初始位置 58
5.4.2 创建伺服电机 59
5.4.3 机构分析 59
第六章 总结与展望 62
6.1 毕业设计总结 62
6.2 对本次设计产品的展望 62
6.3 经济分析 63
参考文献 64
致 谢 66
第一章 引言
1.1 自动化立体仓库概述
如今作为利润源泉之一的物资流通领域,自动化立体仓库在其中就扮演者十分重要的角色。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: