高精度三轴运动平台设计及控制(5kg负载)毕业论文
2020-04-15 17:46:19
摘 要
三轴是指把定位观察的目标设置为坐标原点:正东方面为X轴,正北方向为Y轴,重直方向为Z轴,说通俗点,就是与你正前方与你身体左右平行的横线为X轴,与你身体前后竖直的线为Y轴,与你身体上下垂直的为X轴。称之为三轴。三轴运动是指:X轴上实现左右直线运动,Y轴实现前后直线运动,Y轴实现上下直线运动[1]。而三轴运动平台是指:在一个平台上建立绝对坐标XYZ三轴,通过三轴直线运动作业,这就是三轴运动平台。本文主要对高精度三轴运动平台进行了设计以及控制,测定计算出了平台的传动刚度以及稳定性等参数信息,也对其寿命进行了估算。为其选定了合理高效的控制系统,更好的对运动平台进行控制,达到高精度高效率的要求。
关键词:三轴运动平台;直线滚动导轨副;步进电机;工作台;
Abstract
Three axes refer to setting the target of positioning observation as coordinate origin: the Oriental plane is X axis, the northward direction is Y axis, and the vertical direction is Z axis. Popular point is that the horizontal line parallel to your body is X axis, the vertical line before and after your body is Y axis, and the vertical line is X axis perpendicular to your body. It is called triaxial. Three-axis motion refers to the realization of left-right linear motion on the X axis, the straight forward and backward motion on the Y axis, and the straight upward and downward motion on the Y axis. The three-axis motion platform refers to the establishment of an absolute coordinate XYZ three-axis on a platform, through the three-axis linear motion operation, which is the three-axis motion platform. In this paper, the design and control of high-precision three-axis motion platform are mainly carried out[1]. The transmission stiffness and stability of the platform are measured and calculated. The service life of the platform is also estimated. A reasonable and efficient control system has been selected for it, which can better control the motion platform and meet the requirements of high accuracy and efficiency[6].
Key words: three-axis motion platform; linear rolling guide pair; stepping motor; worktable;
第一章 绪论
1.1选题的背景及其研究的意义
 随着科技的发展和社会的进步,在机械的领域方面也出现了许许多多的问题,比如是当前的工厂工作的工人的工作成本逐渐变高,衍生出了招工难用工荒等等的问题,所以大部分的机械制造企业都需要转型,用一些新型的设备来代替人工工作,使工厂向少人化甚至无人化发展。但是,可以高效率达到工作质量和效率的机器人器材,例如机械手臂等,可是这类器材的非常昂贵的资金,使得很多工厂放弃了这种自动化的生产方式。
随着科技的发展和社会的进步,在机械的领域方面也出现了许许多多的问题,比如是当前的工厂工作的工人的工作成本逐渐变高,衍生出了招工难用工荒等等的问题,所以大部分的机械制造企业都需要转型,用一些新型的设备来代替人工工作,使工厂向少人化甚至无人化发展。但是,可以高效率达到工作质量和效率的机器人器材,例如机械手臂等,可是这类器材的非常昂贵的资金,使得很多工厂放弃了这种自动化的生产方式。
 这种大环境的影响下,三轴运动平台的作用就十分的明显了。三轴运动平台是把所观测的地方看做为坐标中心,三轴运动是指:X轴上实现左右方向的运动,Y轴实现前后直线运动,Z轴实现上下垂直于xy平面的运动。而三轴运动平台是指:在一个空间里模拟监理处XYZ三轴的一个坐标系,通过三轴直线运动作业,称之为三轴运动平台。这用平台中了同步电机驱动,在很多机械比如各种机床,3d打印机之类的都是三轴运动平台的应用。
这种大环境的影响下,三轴运动平台的作用就十分的明显了。三轴运动平台是把所观测的地方看做为坐标中心,三轴运动是指:X轴上实现左右方向的运动,Y轴实现前后直线运动,Z轴实现上下垂直于xy平面的运动。而三轴运动平台是指:在一个空间里模拟监理处XYZ三轴的一个坐标系,通过三轴直线运动作业,称之为三轴运动平台。这用平台中了同步电机驱动,在很多机械比如各种机床,3d打印机之类的都是三轴运动平台的应用。
三轴运动平台有很多实际的优点,购置一台只需要一两万的资金,而不是其他的机械臂之类的几十万的设备。一个三轴运动平台可以代替两到三个工人的作业工作,而且工作的准确度以及效率都远远高出人工甚至有人工的三倍以上。而且三轴运动平台的用途非常之广泛,可以进行各种的机械加工工作,例如喷漆作业,组装作业,3d打印作业,锁螺丝作业等等。
1.2机械平台在机械制造中的发展
 在源远流长的机械制造的历史中,各种各样的机械设备都起到了巨大的作用,它们都代替了大部分的人类劳动力,节约了很多的劳动而且提升了生产效率到了一个非常高的水准,作用重要程度不言而喻。
在源远流长的机械制造的历史中,各种各样的机械设备都起到了巨大的作用,它们都代替了大部分的人类劳动力,节约了很多的劳动而且提升了生产效率到了一个非常高的水准,作用重要程度不言而喻。
运动平台的出现,把机械制造带到了一个新的时代。首先有各种各样的二维的运动平台首先投入到了各种机械中,例如切割和磨削等等机床中,大大的提升了此类加工方式的速度以及精准度,加工周期变长而加工时间变短,生产出来的产品也符合要求。但是这种二维的运动平台有一定的局限性,他只能进行一些平面的加工,而很多机械零件是需要进行三维加工的,这时候三轴运动平台就应运而生。
三轴运动平台顾名思义,它含有XYZ三个轴,可以实现三个方向的零件的机械加工,在之前只有XY两个方向的基础上,增加了一个垂直于加工平面的Y轴方向的加工臂。目前,大部分的机床都使用的是此种运动平台。所以,就可以加工各种的立体零件,更大的拓宽了切削和磨削等加工方式的范围,操作起来更加的方便,也解放了更多的人力劳动,在不断的发展中,三轴的空间定位不断的精准,使得零件更加的完善[7]。
为了实现更加大量的生产,从十九世纪开始,各种类型的机床被制造出来并投入生产。但是也需要保障它的精确度,人们制造了很多的更精确的测量工具例如千分尺和螺纹等等,而且不止于此,机械制造开始逐渐的向全机械自动化方向发展。人们将机床与各类的计算机或制器结合,而且伴随着电子科技技术的蓬勃发展,很多新兴的电子元件也被应用于其中,1952年,世界上的第一台真正的数字控制的机床在美国诞生,由美国的帕森斯公司制造。而这一时期,出现了对自动化对重要的发明,也就是电脑,电脑也应用到了控制系统中,极大地加强了系统的自动化程度。
1.3三轴运动平台在国内外的发展
在科技迅猛发展的当前国内机械领域,三轴运动平台已经被广泛的应用到了各个机械加工的技术中,明显提高了国内的生产水平。各大生产机械的企业和工厂,都可以生产出用于不同种类的机械加工的机床,而这些机床的原形就是高精度三轴运动平台。本来,这一产业在世界上由日本和德国独占鳌头,是有史以来机械生产的强国,但是三轴运动平台这一产业在这两个国家由于经济危机,使得发展受到了严重的阻碍,而中国就在这一时间段迅猛发展,就机床这一产业来说,中国在今年成为了世界上生产率最高的国家,并把这一头衔一直保留到了当前,机床生产空前繁荣。
近年来,三轴运动平台越来越多的与数字化控制相结合,出现了数控机床,这一机床能够更大的车加速了生产率,可以使得加工精度更进一步。而且可以实现很多人力难以实现的复杂操作,加工出很多复杂的零件,还可以保证其精度达到所需要求。现如今,数控机床基本成为了现代化生产的主要设备。
随着社会的不断发展,人们的生活的品质也不断地提升,所以更多的制造业也随之兴起。精密电子的生产需求增多,所以数控机床的也投入到了这一行业中,可以制造出很精密的机械以及电子元件。城市的发展也带来了大量汽车的需求,越来越多的汽车流水线也投入使用,而三轴机械平台就可以很好的制造出汽车的外壳以及内部的中大型零件,对汽车行业的飞速发展贡献了巨大的作用,现在的由完全的自动数控机床生产出来的汽车不但在外观上吸引消费者,它的质量也可以得以保障。
3D打印是近年来新型的一项技术,3D打印机就应用了三轴运动平台。这种打印机突破了以前只能打印二维的打印机,可以打印出各种设计好的零件或者模型。三轴运动平台的三个方向的加工轴就可以发挥最大的作用,由计算机控制,精准的将3D打印机的喷头定位到空间中的任意一点,以达到打印出立体物件的效果,此领域在国内迅猛发展。
德国的机床行业一直处于世界的领先地位,生产出的产品出口到全世界各地,靠的就是过硬的机械机床实力和精密的控制系统。以前,我国的机床行业分支较多,大部分的原型机都是进口德国的。但是,近年来,我国的这一行业得到了迅猛的发展,进口比率大大的减少。无论是从生产的速度效率还是机械的加工精度都可以达到世界前列,已经赶超了德国,成为世界第一大生产强国。
据统计:中国的机床消费金额为221亿美元,美国为62.57亿美元,德国为60.43亿美元,日本为52.24亿美元,韩国为36.32亿美元,我国遥遥领先其他国家[2]。
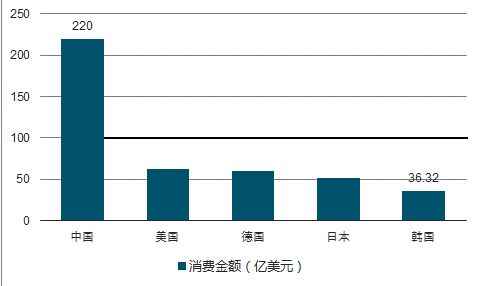
图1-1世界机床消费国消费金额
第二章 三维运动平台总体设计方案
2.1 系统运动的确定与驱动系统
三维运动平台需要实现对随意一个曲面的X,Y,Z三个方向,其坐标轴方向的运动可以联动,实现加工,功能秀要有急停和越位报警,控制速度,平稳运动,自动切换象限,故选用连续控制系统。对工作台的大小进行考究,确定其工作的工作范围,加工的材料为毛坯料,所以可以不需要考虑误差的补偿,开环控制系统就十分符合要求。高端的伺服电动机的造价十分昂贵,但是一些步进电动机电机的性能十分优越,所以可以舍弃前者,这样的话不但可以降低了预算成本,性价比也十分的高。
2.2 机械传动方式
为了使得设计达到所需要的分辨率,就必须使用由步进电机的旋转导螺杆运动。 选择滚珠丝杠螺母对,这么选择的目的是减少摩擦,确保一定的传递精度和传动稳定性。 为了大大的削减传动间隙,实现对传动刚度的要求,这里使用预加载结构。
2.3 计算机系统选择
对计算机系统的选择按照所有给的要求,八位微机是十分适合的。单片机就选择又十分多优点的 MCS-51系列单片机,这种单片机性能很好,集成度也不错,处理数据和系统的性能强大,且速度很快,对各种状况的干扰的抵抗能力很强,性价比和性能比都十分优秀等特点, MCS-51系列8021就完全符合要求。控制系统的组成:微机部件,显示器和I/O接口,光隔离电路和键盘,键盘的操作可以控制系统的命令,例如控制工作加工的命令以及程序中的各个语句命令,机器和机床的工作信息,状态信息都可以在显示器上得以表现。
2.4 总体方案的确定
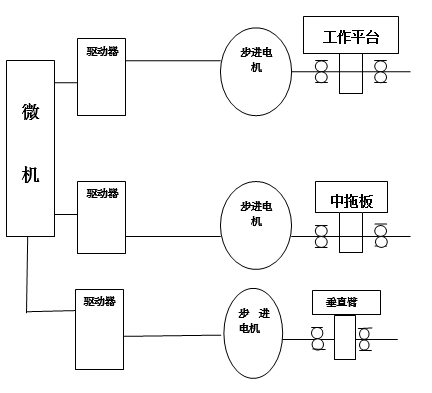
图2-1 工作台总体方案设计
第三章 三轴运动平台机械部分的设计和计算
3.1 要求
首先查看高精度三轴运动平台的设计要求,用Solidworks或者其他三维软件做出虚拟样机,画出机械图纸。控制系统选型设计,选择电机,导轨,控制器,光栅尺。编写控制系统方案,要求对载物台进行运动规划,能够实现三轴运动平台运动范围内,载物台的空间轨迹的任意控制,编写相应的控制程序。
3.1.1 技术参数
1、运动平台面尺寸:400×300;
2、平台移动行程:X×Y=250×200;
3、夹具和工件总重: 50N;
4、切削负载:X向50N;Y向50N;Z向50N
3.1.2 设计要求
1、实现XYZ三坐标联动;
2、步进电动机或者交流伺服电动机作为驱动元件比较合理;
3、需要设置一些紧急的开关,作用为越位报警响应中断,并处理紧急事故;
4、象限可以自动进行切换,可以达到对任意一个曲平面进行加工;
5、平台具有快速驱动功能;
3.2 滚珠丝杠螺母副的计算与选型
3.2.1 X向进给丝杠
1、计算进给牵引力
滚珠丝杠上所受到的作用力主要有切削刀走刀的时候的反作用力,在工作台上的物件的本身所受到的重力,由于在各方向产生了分力也衍生出了摩擦力。在此模型中,选中了加有导轨块的滚动导轨,则选用矩形导轨作为计算模型。
其公式如下:

式子中的 、
、 、
、 、---切削分力(N);50N,50N,50N.
、---切削分力(N);50N,50N,50N.
 ---移动部件上的重量(N);G=50N
---移动部件上的重量(N);G=50N
 ---导轨上的摩擦因数,随导轨型式而不同;=0.15
---导轨上的摩擦因数,随导轨型式而不同;=0.15
 ---影响系数;K=1.1
---影响系数;K=1.1

- 计算最大动载荷

为了确保滚珠丝杠副在一定的轴向载荷作用下,丝杠回转了10000000转后使得点蚀这种现象不发生在滚刀上,需要选取合理的直径 。在这个轴向负载的
。在这个轴向负载的
最大值也就是所能承受的最大动能负载 [3]。
[3]。
公式如下

 为滚珠丝杠副的寿命,
为滚珠丝杠副的寿命, 为其硬度系数令其数值为1,
为其硬度系数令其数值为1, 是运转系数取其数值为1.2,n是丝杠的转速,
是运转系数取其数值为1.2,n是丝杠的转速, 为进给速度
为进给速度 ,
, 是丝杠的导程,
是丝杠的导程, 是使用寿命取12000h。
是使用寿命取12000h。
 =5
=5
 带入公式中
带入公式中



3、滚珠丝杠螺母副的选型
应使其额定动载荷 ,选取山东博特精工有限公司制造的G系列2504-4滚珠丝杠副。
,选取山东博特精工有限公司制造的G系列2504-4滚珠丝杠副。
规格代号 | 公称直径 | 导程 | 滚珠直径 | 丝杠底径 | 丝杠外径 | 循环列数 | 螺母安装尺寸 | 油杯 | 额定载荷/N | 刚度 | ||||||||
2504-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 | 4 | 2.381 | 22.1 | 24.2 | 4 | 40 | 66 | 53 | 44 | 11 | 6 | 5.8 | 10 |
| 7674 | 20423 | 287 | |



















表3-1 G系列滚珠丝杠副尺寸参数
4、传动效率计算
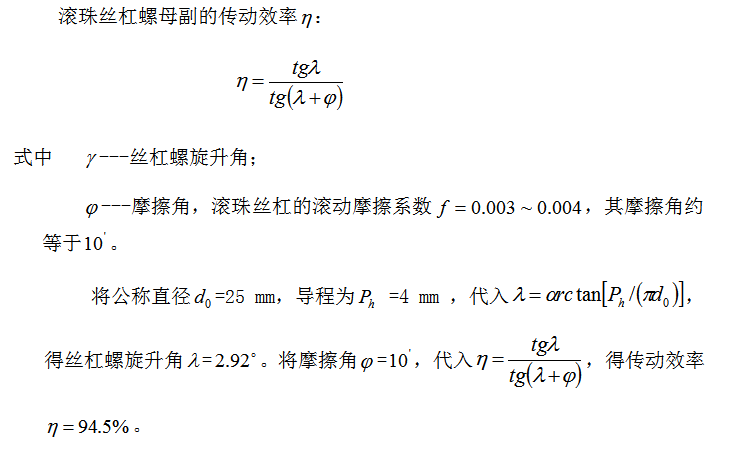
卧式机床的道家的纵向和横向进给运动,对机械传动的系统进行了设计,使用广钢或者丝杠带动刘扮床安以及装滑板产生移动可以用危机控制可以独立 运动的紧急私服系统 卧式
5、刚度计算
最大牵引力为77.5N,由螺母装配总长度为44mm,丝杠螺纹长度取328mm,预计长度为480mm,丝杠螺母及轴承均进行预紧,预紧力为最大轴向负载的1/3。
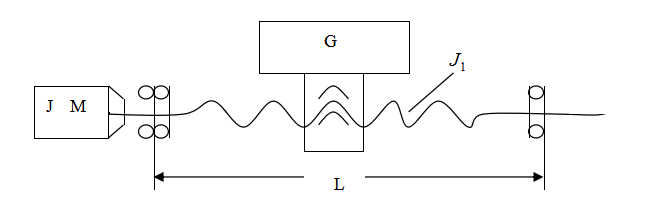
图3-1 X向进给系统计算简图
滚珠丝杠副的变行会影响到紧急系统的定位精度平稳,所以要考虑此因素。
- 丝杠的拉伸或压缩变形量


在这项研究中,机器人运动性能平台是为使用基于记忆的技术实现机器人运动规划的自动化而开发的。这可用于具有各种手臂和腿部形式的机器人。开发的机器人运动性能平台用于通过名称基础到运动命令的运动性能。在本文中,描述了具有两种或更多种不同类型的控制系统的机器人中的运动的实现。为了证明这一点,进行了使用两种类型的机器人进行运动的实验。用于实验的机器人之一是双足机器人。另一个是手臂机器人。此外,在本文中,还讨论了运动混合使用少量运动数据来实现更多运动的方式。它检查了可以使用两个运动数据执行运动混合。结果检查了通过运动混合执行新运动。
将数据带入式子中,得
- 滚珠与螺纹滚道间的接触变形量

有预紧时 
以执行更多的运动。在避免机械手,机器人运动等的操作中,操作命令通过各种技术计算。因此,机器人的控制方法将仅存在操作命令的计算方法的数量。在这种情况下,可以仅通过一种控制方法将机器人控制到一个所提出的机器人因此,将存在许多控制方法,并且存在控制方法变得复杂的问题。因此,在该研究中,进行了以操作指令的计算结果的形式呈现角度信息的机器人的控制基础开发。
公称直径,滚珠的直径

公式
单圈的滚珠数为10,代入
,得出滚珠数的总量120,预紧力=25.8N


丝杠的最大工作载荷=77.5N

代入
计算得。
(3),计算得


有效行程对于四级精度的滚珠丝杠来说,250毫米小于等于315毫米时,可以使之的偏差可以达到16,所以X方向的的刚度是合理的。

3.2.2 Y向进给丝杠
1、计算进给牵引
公式如下:
式子中的、、、---切削分力(N);50N,50N,50N.
---移动部件上的重量(N);G=50N
---导轨上的摩擦因数,随导轨型式而不同;=0.15
---考虑颠覆力矩影响系数;K=1.1
2、计算最大动载荷
为了保证滚珠丝杠副在一定的轴向载荷作用下,丝杠回转了1000000转后使得点蚀不发生在滚道上,需要选取合理的直径。在这个轴向负载的最大值也就是所能承受的最大动能负载[3]。
公式如下:

为滚珠丝杠副的寿命,为其硬度系数令其数值为1,是运转系数取其数值为1.2,n是丝杠的转速,为进给速度,是丝杠的导程,是使用寿命取12000h。
=5 带入公式中
3、滚珠丝杠螺母副的选型
应使其额定动载荷,选取山东博特精工有限公司制造的G系列2504-4滚珠丝杠副。同X方向相同。
4、传动效率计算
因此,机器人灵活地响应人类给出的命令。例如,当请求未知动作时,机器 通过执行类似的已知动作进行响应。实施这些方法后,机器人可以在危险区 进行自主工作。这使得机器人在操作或工具选择期间不再依赖于操作人员。此外,还建议简化机器人开发。在运动生成期间,不必创建新的运动形式划痕。例如,可以从类似的运动创建运动。
5、刚度的验算
由上可知, ,
,

有效行程对于四级精度的滚珠丝杠来说,250毫米小于等于315毫米时,可以使之的偏差可以达到16,所以刚度也满足了要求。
6、压杆稳定性校核
 ≥
≥
方式选择单推-单推的形式,所以
 ≥
≥
所以压杆的稳定性满足要求。
3.2.3 Z向进给丝杠
1、计算进给牵引
公式如下:
式子中的、、、---切削分力(N);50N,50N,50N.
---移动部件上的重量(N);G=50N
---导轨上的摩擦因数,随导轨型式而不同;=0.15
---考虑颠覆力矩影响系数;K=1.1
2、计算最大动载荷
为了保证滚珠丝杠副在一定的轴向载荷作用不产生点蚀,需要选取合理的直径。在这个轴向负载的最大值也就是所能承受的最大动能负载[3]。
公式如下:
为滚珠丝杠副的寿命,为其硬度系数令其数值为1,是运转系数取其数值为1.2,n是丝杠的转速,为进给速度,是丝杠的导程,是使用寿命取12000h。
=5 带入公式中
3、滚珠丝杠螺母副的选型
应使其额定动载荷,选取山东博特精工有限公司制造的G系列2504-4滚珠丝杠副。同X方向相同。
4、传动效率计算
机器人运动性能平台是一个使用基于内存的伺服电机控制平台技术。该系统的结构由运动数据部分和运动执行部分组成,如图1所示。基于存储器的技术是一种通过选择情况并执行运动来预先准备运动数据的方法[42]。机器人运动性能平台包含两个或多个基本运动模式的运动数据,并相应地执行运动。该系统允许混合基本运动模式以产生更多运动。因此,可以使用少量运动数据执行更多运动。该系统包括连接运动数据部分和运动执行部分的接口。该接口可以通过编码在伺服电机上添加关于角度信息的通信方法的信息。因此,基于用于传递角度信息的不同方法,机器人可以使用伺服电机执行运动。
5、刚度的验算
由上可知,,
有效行程对于四级精度的滚珠丝杠来说,250毫米小于等于315毫米时,可以使之的偏差可以达到16,所以刚度也满足了要求。
6、压杆稳定性校核
≥
方式选择单推-单推的形式,所以
≥
所以压杆的稳定性满足要求。
3.3 滚动导轨的计算与选择
滚动导轨在各种机械设备上均有应用,在我们的三轴运动平台中也用到滚动导轨,滚动导轨虽有不少缺点,比如刚度较低,轨面的作用效果很容易被灰尘等赃物影响,而且制造较难成本高,也有很多优点,它使得摩擦阻力更小,对机械效率有很大的提升,而且不易磨损使用寿命很长,几乎不存在爬行现象。所以本设计使用滚动导轨。
3.3.1 滚动导轨副的额定寿命
滚动导轨副会在使用一定的时间后,由于使用时的摩擦以及材料的滚动疲劳,造成了部分零件的失效或者损坏,导致了表面剥落,而在此时导轨所行走的总距离就是其寿命。
1、滑块承受工作载荷 的计算及导轨型号的选取
的计算及导轨型号的选取
在本节中,我们将介绍类似于基础技术的RT中间件。 RT中间件是用于机器人系统开发的软件基础技术,其目的是技术共享和重用。 RT中间件模块化机器人的功能组件,例如传感器,伺服和电机。它用于组合模块化的功能组件。因此,设计师可以构建一个新的机器人系统,更有效地满足用户的广泛需求[ - [25]。使用该技术开发的系统示例包括移动机器人系统,通信系统和操纵系统[26] - [28]。 RT中间件项目针对RT中间件的技术共享和重用。关于RT中间件项目的几篇报道已经发表[29] - [41]。
其中,载物台所载物件的重力G=50N,外加载荷F=50N
得出Fmax=62.5N。
根据所算出来的最大工作载荷,可以初步选出直线滚动导轨副,选取海特SBG 15 FL。
本研究开发了机器人运动命名规则的新概念,以促进机器人运动规划的自动生成。运动命名规则允许使用名称库生成运动。因此,它在技术上与RT中间件不同。


表3-2 直线滚动导轨副参数
本设计的三轴运动平台的平面尺寸为400×300,但是工作的时候一定要留出一定的工作余量,所以选择长700mm的直线滚动导轨。
2、距离额定寿命L的计算
距离额定寿命计算公式:
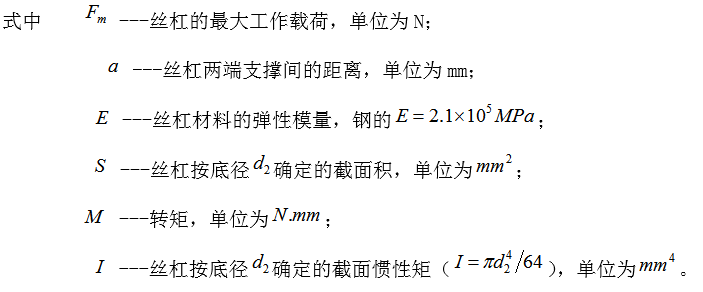
式中  ---距离额定寿命,单位为
---距离额定寿命,单位为 ;
;
 ---额定动载荷,
---额定动载荷, ;
;
 ---滑块上的工作载荷,单位为
---滑块上的工作载荷,单位为 ;
;
 ---温度系数,
---温度系数, ;
;
 ---接触系数,
---接触系数,  ;
;
 ---载荷系数,
---载荷系数,
 ---硬度系数,滚道硬度不得低于HRC58故通常取
---硬度系数,滚道硬度不得低于HRC58故通常取
 ---精度系数,精度等级4级,
---精度系数,精度等级4级, =0.9
=0.9
= =4550.8km
=4550.8km
由计算可知,距离额定寿命符合要求。
3.4 步进电机的计算与选择
在选择步进电机时,需要计算在负载的条件下,电机轴上的等效惯量,在各种的共况条件下,需要计算出其等效力矩。最后根据电动机最大的转矩来选择步进电机。
3.4.1 步进电动机减速箱的选用

 ,选择步进电动机的步距角
,选择步进电动机的步距角
可以由公式

所以本设计不加减速箱。
3.4.2 转动惯量与转矩的计算
计算每个零件的转动惯量:



代入公式可算出滚珠丝杠的转动惯量:

其转动惯量为

根据所算数值,可以初步选用90BYG2502为步进电动机。


代入公式可得
1 计算加在步进电动机转轴上的等效负载转矩
计算电动机转轴在最大工作负载的条件下的转矩:
最大工作负载转矩由三部分组成,其一是在最大工作负载的条件下,转轴为电动机提供了一个最大转矩, ,电动机轴上的摩擦转矩,其三是预紧了滚珠丝杠后在电动机的转轴上面附加的摩擦转矩。但是此转矩
,电动机轴上的摩擦转矩,其三是预紧了滚珠丝杠后在电动机的转轴上面附加的摩擦转矩。但是此转矩 ,所以这里不计入计算。
,所以这里不计入计算。
公式为
首先计算最大工作负载转矩
X轴方向的最大进给载荷 ,代入公式可得
,代入公式可得

在Y轴方向承受最大的工作服在,电 的转轴的摩擦转矩
的转轴的摩擦转矩

可得

步进电动机转轴上的最大等效负载转矩应为:
2 步进电动机最大静转矩的选定
所计算出来的最大等效负载转矩 ,代入安全系数,安全系数取
,代入安全系数,安全系数取
则需要满足等式:

由选择的步进电机型号查表可得,该电机的

所以初选的步进电机90BYG2502满足所需要求。
3.5 联轴器
3.5.1联轴器的选择
此外,运动混合可以使用低运动数据执行更多运动。这在实验中检查了使用 两个运动数据执行的新运动。从现在开始,机器人运动性能平台已经过改进,可以使用运动命名规则决定生成运动。主要内容如下。首先,机器人运动性能平台中包含了可以处理机器人自主工作所需的传感器反馈处理的结构。并且,通过与PC和微型计算机的通信来扩展系统。此外,机器人运动性能平台还可以使用虚拟世界作为目标;因此,机器人运动性能平台可以在虚拟世界中实现。在未来的研究中,我们计划在现实世界和虚拟世界中降低机器人运动编程的成


表3-3 联轴器的参数型号
本设计联轴器初选SRJ-40C,各参数也如表3中所示。
3.5.2计算转矩
T为传动轴的公称转矩,计算公式如下:

在计算的时候,还需要将工作情况系数 考虑进去。
考虑进去。

经过代入计算,可得:

所以可确定联轴器选择SRJ-40C。
第四章 控制系统电路设计
4.1 控制系统
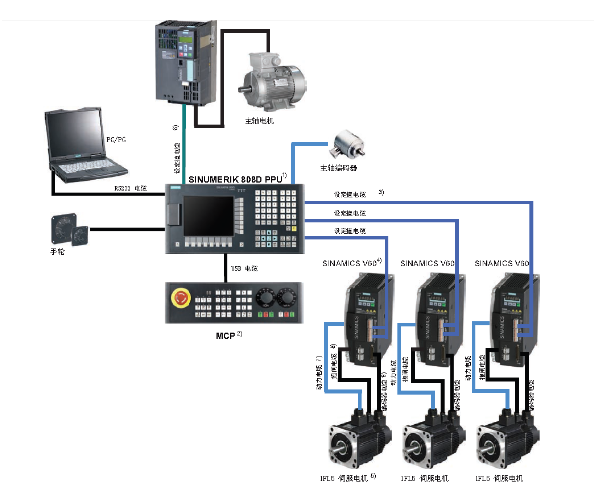
三轴运动平台的应用需要考虑它的安全性和可靠性,三维运动就采用了工控机配合运动控制卡组成的耳机主从式控制的结构。考虑到设备的种种特点,系统可以使用全数字控制结构,也就是pc加运动控制卡,组合起上位机的高精度定时器以及pid控制器,组合出一个性能完善,有更广阔的控制方式的一种伺服系统。
伺服系统的的工作效率可以提高,传来的各种待处理的数据的处理速的也可以调高,因为这个控制运动卡,它以DSP为核心。把PCI总线和pc里面的CPU进行通信,接到了来自pc机的控制指令,经过了内部电路的逻辑运算,给动力的执行专职提供了精确地控制信号,来实现了运动的控制功能。
 对于三轴运动平台在机器人方面的应用,运动混合可以使用低运动数据执行更多运动。这在实验中检查了使用两个运动数据执行的新运动。从现在开始,机器人运动性能平台已经过改进,可以使用运动命名规则决定生成运动。主要内容如下。首先,机器人运动性能平台中包含了可以处理机器人自主工作所需的传感器反馈处理的结构。并且,通过与PC和微型计算机的通信来扩展系统。此外,机器人运动性能平台还可以使用虚拟世界作为目标;因此,机器人运动性能平台可以在虚拟世界中实现。在未来的研究中,我们计划在现实世界和虚拟世界中降低机器人运动编程的成本。这将有助于在现实世界和虚拟世界中实现无缝的机器人运动性能平台。我们使用运动命名规则来增强机器人运动性能平台。机器人运动性能平台可根据工作要求促进功能的生成(尤其是运动的生成)。该平台是运动控制器的二次开发平台设计理念的技术革新,具有很高的理论研究前景和应用价值[8]。
对于三轴运动平台在机器人方面的应用,运动混合可以使用低运动数据执行更多运动。这在实验中检查了使用两个运动数据执行的新运动。从现在开始,机器人运动性能平台已经过改进,可以使用运动命名规则决定生成运动。主要内容如下。首先,机器人运动性能平台中包含了可以处理机器人自主工作所需的传感器反馈处理的结构。并且,通过与PC和微型计算机的通信来扩展系统。此外,机器人运动性能平台还可以使用虚拟世界作为目标;因此,机器人运动性能平台可以在虚拟世界中实现。在未来的研究中,我们计划在现实世界和虚拟世界中降低机器人运动编程的成本。这将有助于在现实世界和虚拟世界中实现无缝的机器人运动性能平台。我们使用运动命名规则来增强机器人运动性能平台。机器人运动性能平台可根据工作要求促进功能的生成(尤其是运动的生成)。该平台是运动控制器的二次开发平台设计理念的技术革新,具有很高的理论研究前景和应用价值[8]。
机器人运动性能平台包含两个或多个基本运动模式的运动数据,并相应地执行运动。该系统允许混合基本运动模式以产生更多运动[11]。因此,可以使用少量运动数据执行更多运动。该系统包括连接运动数据部分和运动执行部分的接口。该接口可以通过编码在伺服电机上添加关于角度信息的通信方法的信息。因此,基于用于传递角度信息的不同方法,机器人可以使用伺服电机执行运动。该系统可以用包括各种伺服电动机的两种或更多种不同类型的机器人执行运动。此外,机器人运动性能平台的结构分离了运动数据部分和运动执行部分[9]。因此,仅对于每个运动数据输入的一个运动执行部分,可以执行运动。这使得系统具有内存效率。
4.2 单片机硬件电路设计
4.2.1控制系统框图
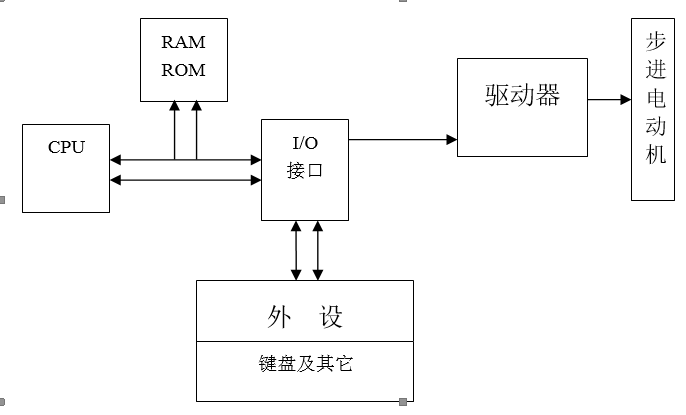
图4控制系统框图
控制系统的硬件如图所示。
4.2.2 CPU的选型
综合考虑设计的要求以及种种其他例如经济性和实用性的要求,本三轴运动控制系统的CPU选择
4.3 I/O接口电路的设计
针对本控制电路的使用要求,在应用的控制系统中需要扩展I/O口芯片,所以本设计扩展
4.4 控制系统实现的功能
设计出的控制系统,需要实现对XYZ三个轴的方向的运动控制,以及三个方向上运动的协调控制;还要实现对系统出现紧急情况进行应急处理;以及高精度三轴运动平台的工作参数在屏幕上的显示[5]。
4.5 PLC梯形图
以应用在机床中的高精度三轴运动平台工作为例,机床卡爪夹住方形工件为例,从开始夹住工件移动到指定位置放下工件,然后卡爪回到原位的工作过程的具体梯形图如
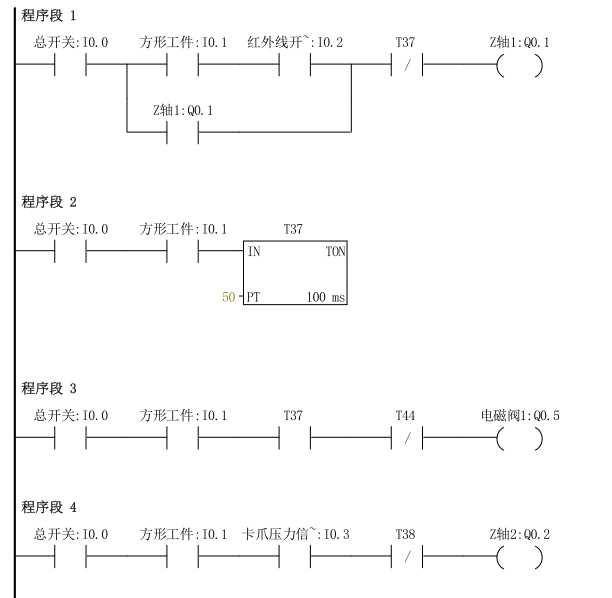
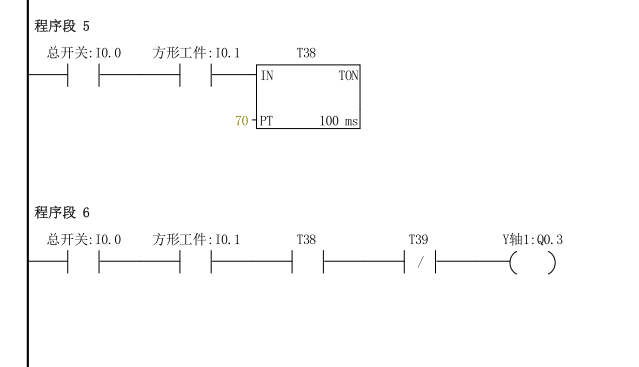
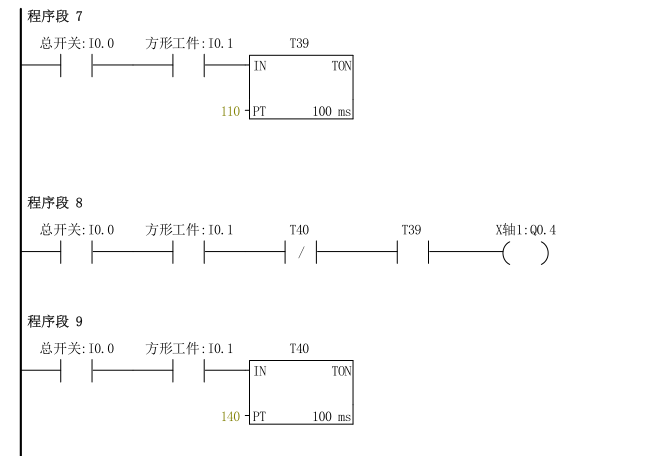
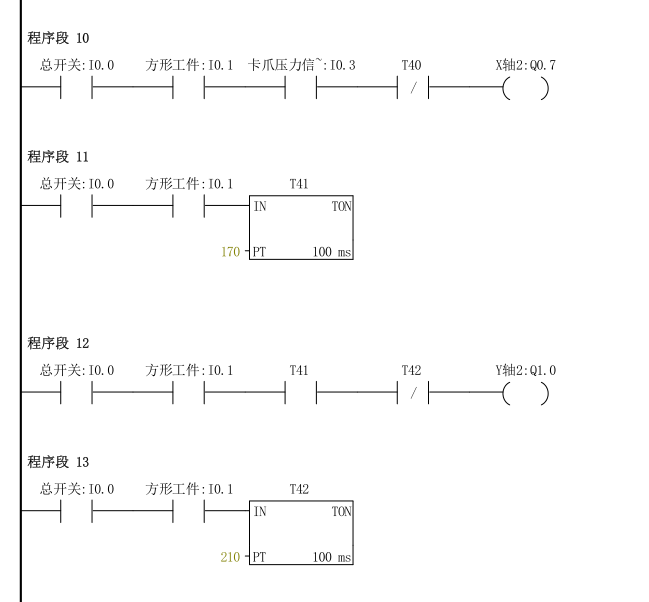
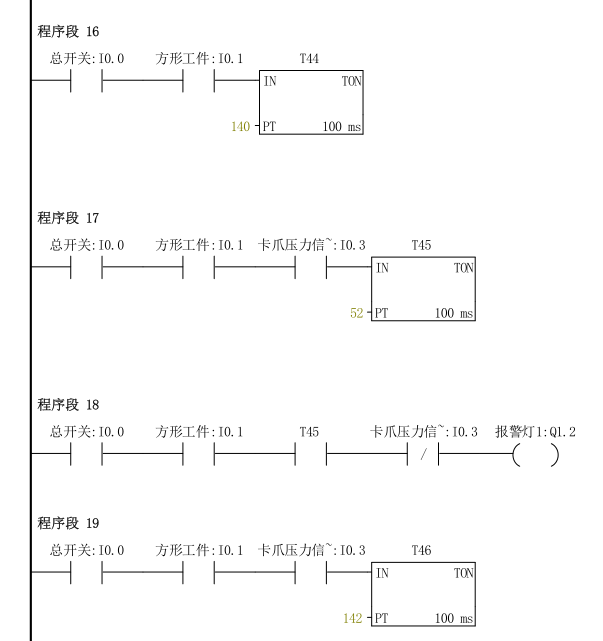
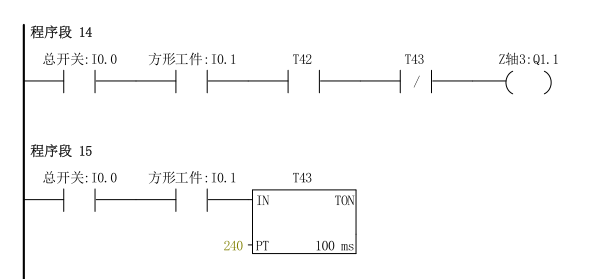

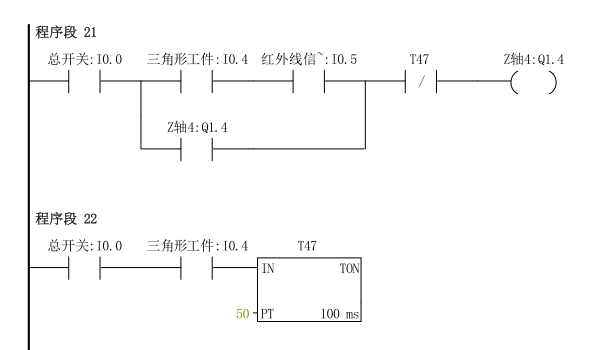
这就实现了自动抓起工件移动以及自动复位的功能。
第五章 总结及展望
本文对于高精度三轴机械平台进行了详细的设计,能够使改平台可以实现XYZ三个轴方向的运动的,以实际的机床工作原理为基础,针对对被加工物件的加工方式,设计了该运动平台的运动方式。使之可以实现对所载物件最高达到5KG。而且需要使之达到一定的加工精度,为了保证机器工作的正常运行,本文校核了所选的机械零件,使所选的部件可以达到设计所需的要求,还需要保证机器的正常运行。
本文针对高精度三轴运动平台的电动机的选型进行了一系列的计算,根据设计所需的要求,计算了所选的电动机90BYG2502的最大转矩在最大负载的情况下,还计算了它的最大静转矩,得出的数值可以分析出,该电动机可以满足本设计的要求[10]。
本文也针对该高精度三轴运动平台的工作,设计了一系列的控制系统。提出了一些控制系统的设计思路,使其可以达到对运动平台的工作控制。也对控制系统的硬件进行了一定的选型以及确定其控制的方式,最后也预计了该控制系统能够实现的功能。
高精度三轴运动平台在现在以及未来,对机械加工以及制造生产的领域一直会起这重大的作用,在现代机械的发展中越来越成为了不可或缺的一部分,更精密,更可靠,更安全的三轴运动平台正在不断的出现,使生产出来的产品的质量和效率都有着显著的提升。随着硬件设施的不断升级,控制系统的质量也不断的在提高,使机器能更好的完成所设计的要求,也推动了这一领域向更加自动化的方向发展。
参考文献
[1]王丽梅,赵晨,孙宜标.基于动态轮廓误差估计的三轴运动平台NNLARC控制[J].制造技术与机床,2019(05):116-121.
[2].制造技术与机床月刊[J].制造技术与机床,2019(04):154.
[3]杨明珠. 变截面冷弯成型机传动的三维建模与动态仿真[D].北方工业大学,2009.
[4]陈贤高,祖莉,欧屹,王瑞,冯虎田.滚珠丝杠螺母内滚道型面的检测方法[J].组合机床与自动化加工技术,2019(05):102-105 110.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: