高空玻璃墙自动清洗装置设计毕业论文
2020-04-11 17:41:24
摘 要
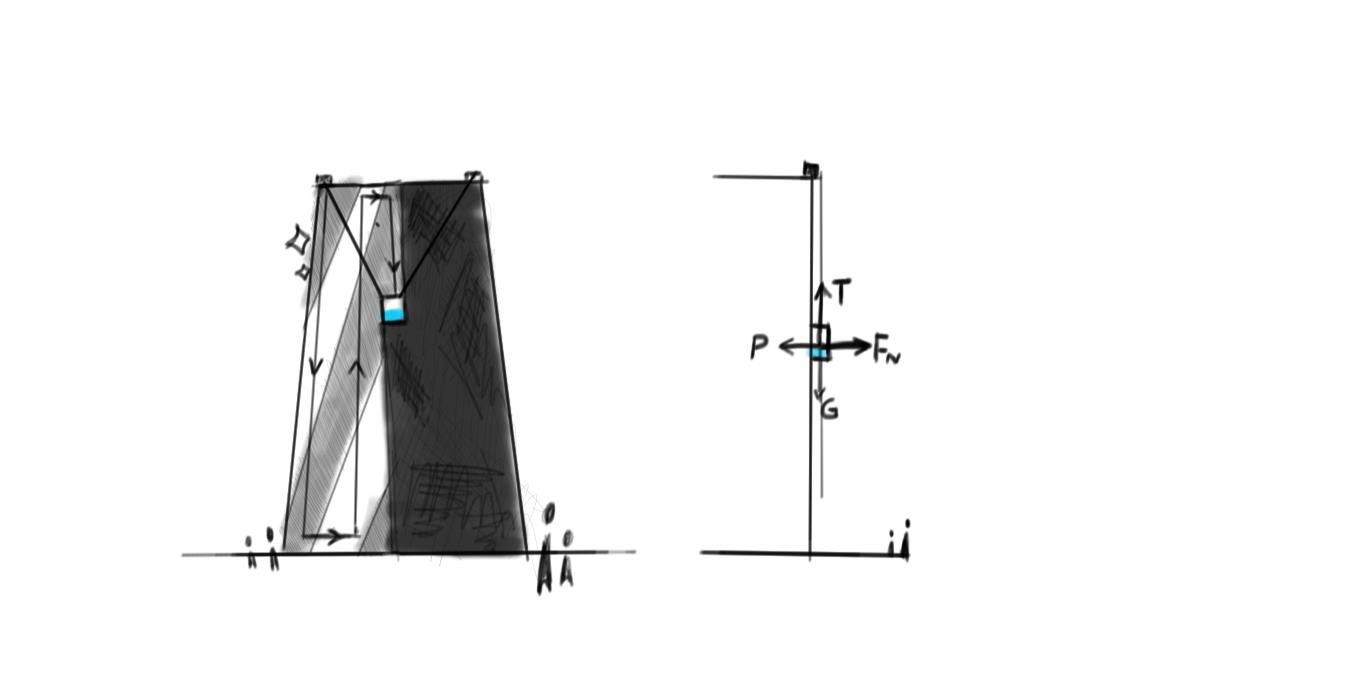
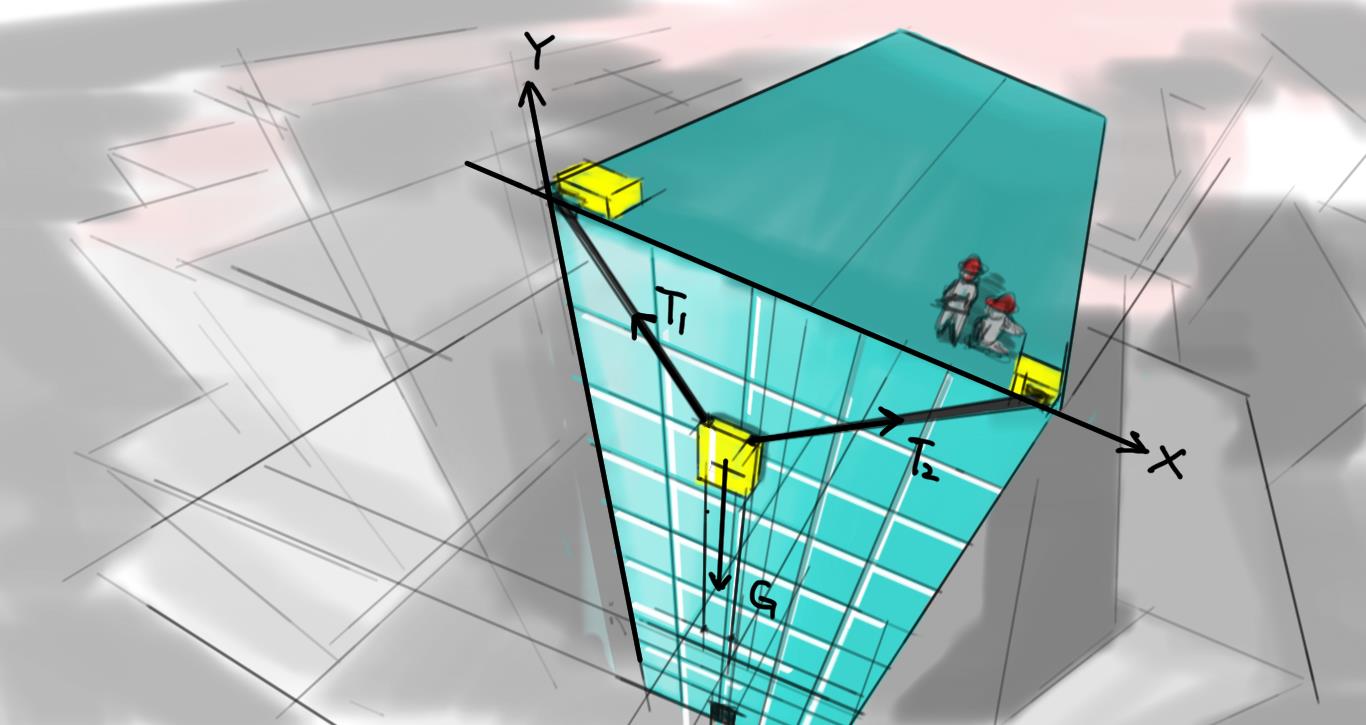
本文根据目前玻璃幕墙清洗作业的发展现状提出了一种新式高空玻璃幕墙清洗装置的方案并借助建模软件Inventor对整个装置进行了建模设计,该方案通过两根柔索分别系于建筑顶部左右端,另一侧分别绕过清洗装置左右侧的驱动辊,通过伺服电机驱动其柔索的配合收放与圆弧导轨引导的柔索角度辅助来控制清洗装置在壁面的灵活移动,同时辅以负压吸盘提供可靠的吸附能力,使得其能够牢固的吸附在壁面上,顺利完成清洗作业。
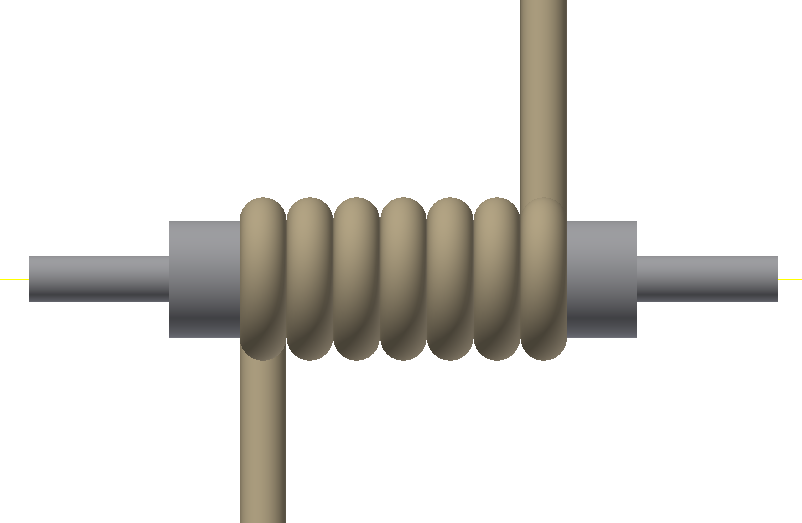
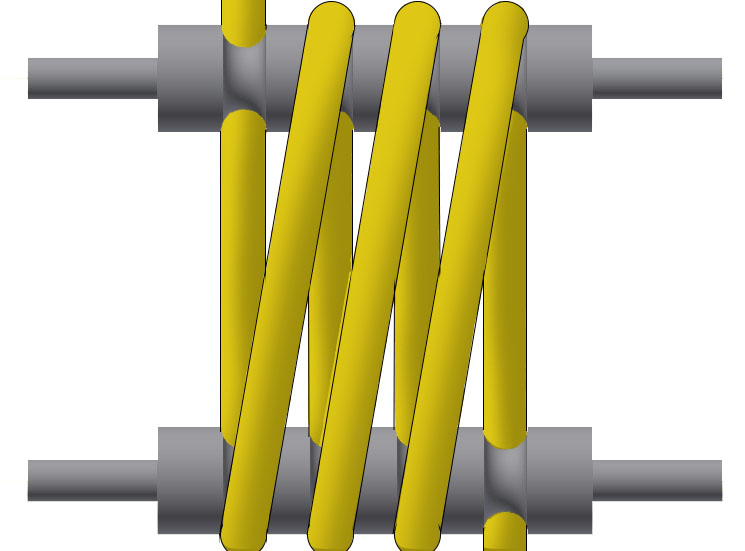
论文主要研究了清洗装置的各个部件结构选型与尺寸,柔索驱动过程中的受力分析,确定了柔索缠绕方式与装置自重与所需配重之间的关系,分析了清洗装置在工作中实际所能达到的工作空间,并提出了其作业动态的柔索收放模型,为控制系统的设计提供了基础。本文通过对清洗装置中重要零部件的强度校核与装置特殊位置时会产生的额外转矩进行分析,确定了其安全自重限制范围。
通过对清洗装置的各项选型与设计,相关分析与校核,最终确定了该装置的整体技术指标,与目前主流的清洗装置进行比较,具有清洗效率高,重量轻,小型化,灵活化等特点,对高空清洗作业的研究发展有一定的意义。
关键词:清洗装置;玻璃幕墙;双柔索;负压吸盘;Inventor;圆弧导轨;
Abstract
Based on the current development status of glass curtain wall cleaning operations, this paper proposes a new type of high-altitude glass curtain wall cleaning device and uses the modeling software Inventor to model and design the entire device. The solution is connected to the top of the building through two flexible cables. At the same time, the other side bypasses the drive roller on the left and right side of the cleaning device respectively, and the flexible motor can be controlled by the servo motor to drive the cooperative retraction of the flexible cable and the angle of the flexible cable guided by the circular guide rail to control the flexible movement of the cleaning device on the wall surface. The vacuum suction cup provides reliable adsorption capacity, enabling it to be firmly adsorbed on the wall surface and complete the cleaning operation smoothly.
The paper mainly studies the structure selection and size of each component of the cleaning device, the force analysis during the driving process of the flexible cable, and determines the relationship between the winding mode of the flexible cable and the device's own weight and the required weight, and analyzes the cleaning device at work. In the actual work space can be achieved, and put forward its operating dynamics of the cable retractable model, provides a basis for the design of the control system. This article analyzes the strength of the important components in the cleaning device and the extra torque that will be generated when the device is in a special position, and determines the safety weight limit range.
Through the selection and design of the cleaning device, correlation analysis and verification, the overall technical specifications of the device are finally determined. Compared with the current mainstream cleaning devices, the device has high cleaning efficiency, light weight, miniaturization, and flexibility. Such characteristics have a certain significance for the research and development of high altitude cleaning operations.
Key Words:cleaning robot;glass curtain wall;double cable;vacuum sucker;Autodesk Inventor;circular guide;
目 录
第1章 绪论 1
1.1 课题研究背景、目的及意义 1
1.2 各种清洗机器人的分类比较 2
1.3 目前国内外研究概况 2
1.3.1 国外研究状况分析 2
1.3.2 国内研究状况分析 3
1.4 本文主要研究内容 4
第2章 清洗装置方案设计 5
2.1 设计目标 5
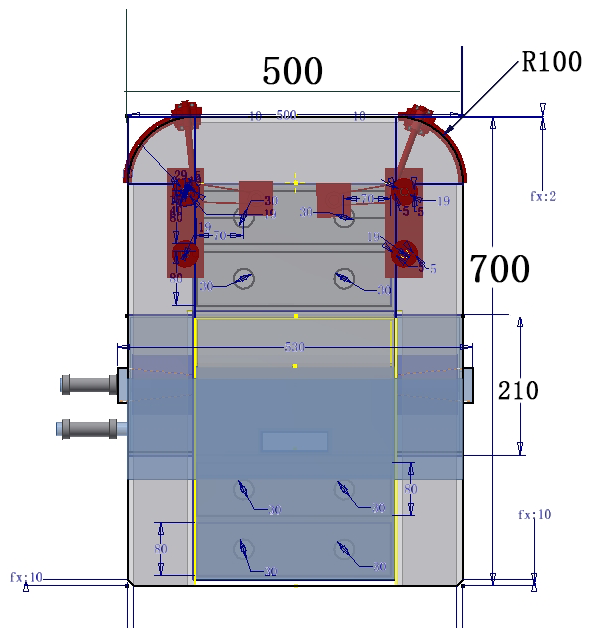
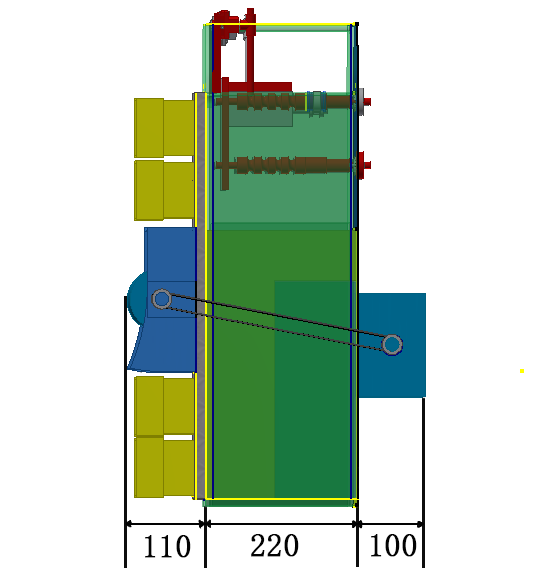
2.2 清洗装置的结构功能设计与尺寸确定 5
2.2.1 双柔索驱动的壁面全向移动单元 8
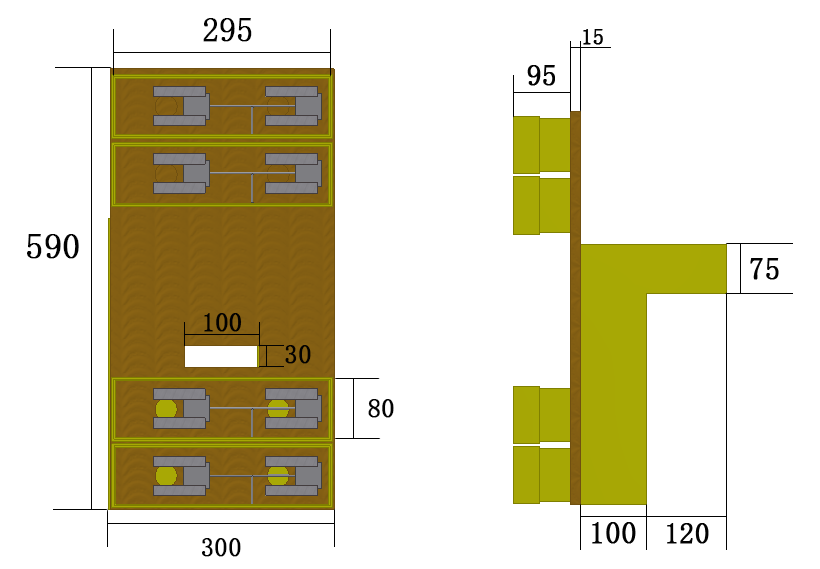
2.2.2 负压吸盘单元 11
2.2.3 滚刷清洗单元 13
第3章 清洗装置本体机构设计与相关分析 15
3.1 双柔索驱动的移动单元的设计与分析 15
3.1.1 辊轮槽数的计算 15
3.1.2 圆弧导轨的设计与分析 17
3.1.3 清洗装置工作空间与动态分析 18
3.2 负压吸盘单元 22
3.2.1 吸附时清洗装置下滑作业中的受力分析 22
3.2.2 清洗装置越障时动态分析 24
3.2.3 安全性分析与计算 25
第4章 清洗装置控制系统设计 27
4.1 清洗装置总体控制系统的要求 27
4.2 清洗装置本体控制系统的硬件设计 27
4.3 清洗装置本体控制系统的软件设计 28
第5章 总结与展望 30
参考文献 31
致谢 33
第1章 绪论
现代城市建筑楼层越来越高,大面积落地窗的设计也越来越常见,采用玻璃幕墙的建筑数不胜数。玻璃幕墙增加了采光面积和建筑的通透度,让人们有视野开阔的体验;炫酷的玻璃幕墙也赋予了建筑更多的活力与时尚感。但随着越来越多的此类高耸的玻璃幕墙的应用,其清洗与维护方面的问题便凸显出来了。玻璃本身作为一种透明材质,使得灰尘和污渍十分明显,而且动辄几十米的高度也给清洗人员带来了极大的麻烦。目前清洗方式仍然主要依赖人工,清洗人员需要通过吊索悬在几十米的半空中进行清洗作业,给工作人员人身安全带来了极大的隐患。
如此,一种移动服务型机器人——爬壁壁面清洗机器人应运而生。这是一种能替代人工对建筑物上的玻璃幕墙进行有效清洗的装置,其可以在竖直的墙壁或者表面上移动并开展清洗作业。这种先进的清洗装置的应用将使工作人员从这种高危环境中脱身,保障了他们的人身安全,同时提高了清洗效率以及劳动生产率以及有效地降低如今众多高层建筑的清洗与维护成本,在社会经济发展和进步方面都有重大的意义,以及广泛的应用前景。而目前针对此类装置的研究仍缺乏比较成熟、可靠的方案。
1.1 课题研究背景、目的及意义
玻璃幕墙作为现代主义发展中出现的一种新式墙体,其具有将美学与功能、形式与结构等概念有机结合起来的独特优点。其本身会随着观察角度的不同,周围环境光线的变化而产生不同的色调变化,光影变化,将一种变幻莫测无与伦比的未来美学带给大众。其特色建筑遍布世界各地,例如西尔斯大厦、纽约世贸中心、上海联谊大厦以及香港中银大厦等均成为了当地的地标性建筑。
作为建筑中外墙表面装修的玻璃幕墙,在材料构成上,其需要有微量的铁、镍、铯、铬等金属元素参入并经过钢化等处理过程,最后形成色泽透明的玻璃板,其拥有吸收一定的太阳辐射、红外色光等能力,比起其视觉上带来的通透感,其仍然具有降低室内温度等其他不透光建筑材料所具有的优点。根据不同的使用要求,可以在设计时调节其表面处理工艺或者是整体材料配比组成,控制其反光度和透光度,是一种优点颇多又利于制造的上佳材料。
一般玻璃幕墙主要分为两种类型:明框玻璃幕墙与隐框玻璃幕墙
金属框架构件显露在外表面的被称作明框玻璃幕墙。它以特殊断面的铝合金型材为框架,其内的凹槽镶入整片玻璃板。这样其型材便可既当作间架结构又承担了固定玻璃板的作用。这是一种最为传统、运用最为广泛且可靠性出众的方式,其施工要求与隐框玻璃幕墙相比更加简单直接。
与之相对的隐框玻璃幕墙顾名思义则是从室外看不见其金属框结构的玻璃幕墙,其具体细分又可分为全隐型与半隐型,但主要的构造特点都类似,即用某些特制的结构密封胶将玻璃与内部框架粘连接合,其载荷主要靠密封胶体承担,这对密封胶体的强度则提出了较为严格的要求。
1.2 各种清洗机器人的分类比较
目前,机器人在光滑的垂直表面上有多种不同的运动类型:多足式,滑动式,轮式和链带或履带式。而附着力原理也主要分为以下四种:1)真空吸盘,2)抓握抓手,3)螺旋桨,4)负压。由于存在许多自由度,多腿运动机器人过于复杂。这种机器人采用真空吸盘并抓取抓手附着在建筑物上,不符合小型化和低复杂性的要求。
1.3 目前国内外研究概况
工业机器人的身影已经在目前的工业领域越来越多,不过目前他们通常仍需要经过专业培训的人员来操控并完成高速度和高精度的单一重复性工作。如今智能控制领域、传感器与材料科技领域蓬勃发展,机器人在服务业也有了新的应用前景。在服务行业机器人所扮演的角色有了些许变化,其与人交互的部分逐渐增多,工作环境也变得更加多样化,很多需求和信息变得多种多样且时刻变化,这对其自主采集收集信息并分析的能力提出了严苛的要求,这便依赖于传感器技术与控制决策智能的发展。所以出众的灵活性、强大的适应性便成为了该类机器人研发过程的重要指标,为了让机器人可以在更加广泛的行业服务于人类,许多领域都将服务型机器人控制系统作为一个研发重心。
作为服务型机器人中的一个热门重点领域,目前许多拥有大面积平面的物体以及场所,都逐渐开始应用清洗机器人进行清洁作业,例如飞机、轮船的清洁保养,公共区域的清扫,以及本文主要的讨论目标——高层建筑玻璃幕墙壁面的清洗,都有着极大的应用价值与前景。
1.3.1 国外研究状况分析
日本BVE公司设计的一种基于固定轨道式的自动玻璃清洁机器人[1],如图1.1所示。通过安装在楼顶的轨道及吊装系统使擦窗机移动与对位,沿固定安装在建筑物表面的导槽垂直上下移动进行自动清洗。该设备的高自动化程度以及高效率决定了其价格也居高不下。此外,该设备的运行轨道需要在建筑物设计之时就予以考虑,这给其适应性与普遍性带来了巨大的影响,对其适用范围和推广都带来了极大的限制。
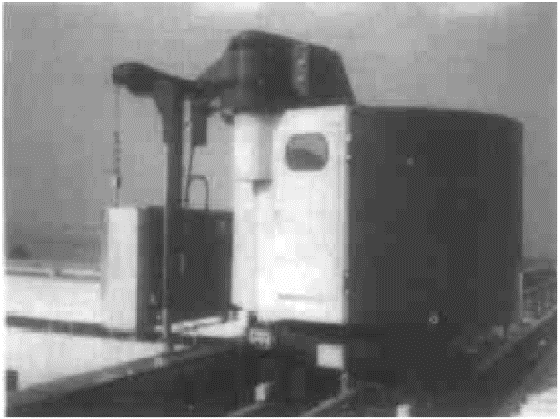
图1.1 日本固定轨道擦窗机图
ROMA[2]:一种多功能自走式爬坡机器人,可进入复杂的金属环境并支持自身的运动系统进行三维(3-D)运动。 一般来说,该机器人的构造和控制非常复杂,并且不提供清洁机器人所需的高效率和简单操作。带轮子和链式轨道机器人一般都拥有很好的便携性。 该机器人以负压或螺旋桨为其提供附着压力; 这也为其可以连续移动提供了可能。但是该类型机器人的行动表面就被限制为平坦的壁面了。
德国主要的生产及自动化研究中心就是位于德国马格堡的自动控制与操作研究所(IPA)[3],它研制了一系列清洗建筑物玻璃的自动系统。如图1.2所示是其中之一,曾完成了在柏林新建火车站的巨大玻璃隧道的清洗作业。该机器人挂在水平的可以沿垂直导槽上下移动的横向轨道上,可沿轨道左右移动,从而完成整块玻璃的清洗作业。

图1.2 IPA清洗机器人整体图
1.3.2 国内研究状况分析
目前国内在清洗作业机器人方面也进行了相当的研究,主要有:
自1996年以来,北航大学机器人研究所的团队一直在开发一系列具有用于玻璃幕墙清洁的滑动框架的Sky Cleaner自动攀爬机器人[4]。第一个模型灵巧性有限,不能在垂直墙上工作。由于其身体没有腰部关节,机器人无法纠正运动方向。此外,处理和穿越障碍物的频率非常高,因此清洁效率仅为37.5平方米/小时。第二个样机非常便携,清洗效率约为75 m2/h。但是,由于减轻重量带来的压力很大,施工刚度非常低,因此,工作时有一点失真。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: