基于Matlab的六自由度机器人设计毕业论文
2020-02-19 18:22:58
摘 要
本文借助Matlab软件对KUKA30-3六自由度机器人进行了建模,并且对其运动学轨迹进行了分析与仿真。
首先使用了D-H参数法,对六自由度机器人的各个关节进行建模,并且建立了坐标系和设定了参数,完成对各个关节坐标系和位姿的设定之后,在MATLAB-Robotics工具箱中对该六自由度机器人进行建模。在得到机械手模型的基础上,使用五次多项式规划其运动轨迹。首先规划KUKA30-3机器人在工作空间内的直线的运动,仿真出其运动模型,并且得到相应位置、速度和加速度的参数。紧接着我们对该机器人进行圆弧曲线运动的轨迹规划,得到其运动仿真模型。在上面的基础上,最后进行混合运动的轨迹规划和建模仿真,通过工具箱内的相应函数,我们在Matlab中可以得到KUKA30-3机器人的运动模型以及任意插值点的位置、速度和加速度值,参考这些实时的数值,我们可以得出机器人的运动规律,发现在工作空间内,设计的机器人运动轨迹是可以实现的,并且机器人能在运动过程中保持平稳运行。
本文实现了六自由度机器人在空间中运动的可行性,为六自由度机器人未来的研究和应用提供了参考依据。
关键词:六自由度机器人;Mablab;建模;轨迹规划
Abstract
In this paper, the kuka 30-3 6-dof robot is modeled with Matlab software, and its kinematic trajectory is analyzed and simulated.
Firstly, d-h parameter method was used to model each joint of the six-dof robot, and the coordinate system and parameters were established. After the setting of each joint coordinate system and pose was completed, the six-dof robot was modeled in the matlab-robotics toolbox.On the basis of the model of the manipulator, its trajectory is planned by the quintic polynomial.Firstly, the linear motion of the kuka30-3 robot in the workspace is planned, and its motion model is simulated, and the corresponding position, velocity and acceleration parameters are obtained.Then we plan the trajectory of the robot's arc curve motion and obtain its motion simulation model.On the basis of the above, the final mix of movement trajectory planning and modeling simulation, through the corresponding function of the toolkit, we can get in Matlab KUKA30-3 the motion model of the robot as well as any interpolation point position, velocity and acceleration value, refer to the real-time numerical, we may safely draw the robot's motion law, found in the work space, the design of robot trajectory can be implemented, and the robot can keep running smoothly in the process of movement.
In this paper, the feasibility of six-dof robot moving in space is realized, which provides a reference for the future research and application of six-dof robot.
Key Words:Six-dof robot;MATLAB-Robotics;modeling;Trajectory planning
目 录
第一章 绪论 1
1.1研究背景 1
1.2研究的目的和意义 1
1.3国内外研究现状 1
1.4研究内容和思路 2
第二章 六自由度机器人的介绍 3
2.1机器人的自由度 3
2.2六自由度机器人的组成 3
2.3六自由度机器人的技术参数 4
2.3.1机器人的主要技术参数 4
2.3.2 KUKA30-3机器人的技术参数 5
2.4 六自由度机器人的研究方向 6
第三章 六自由度机器人的建模方法 7
3.1 D-H法建模 7
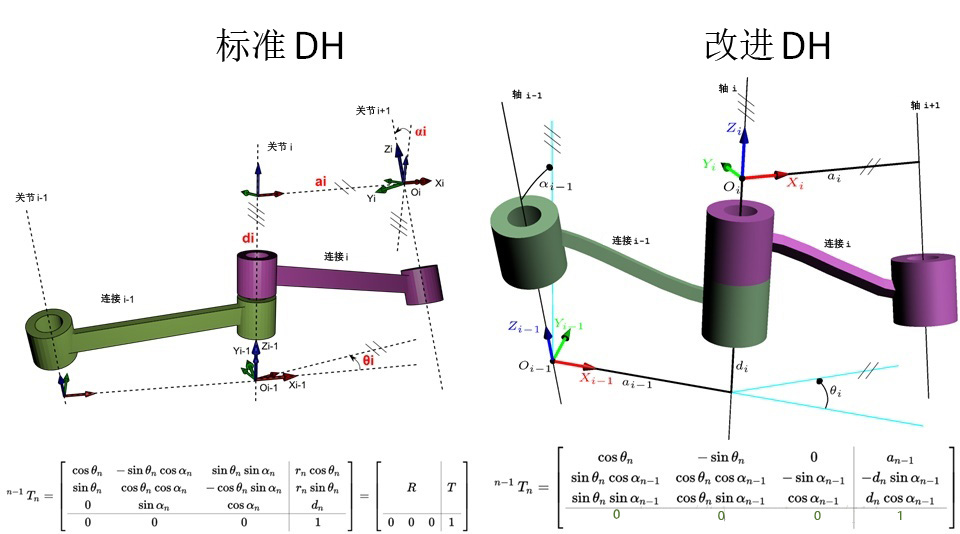
3.2 标准D-H模型和改进D-H模型 8
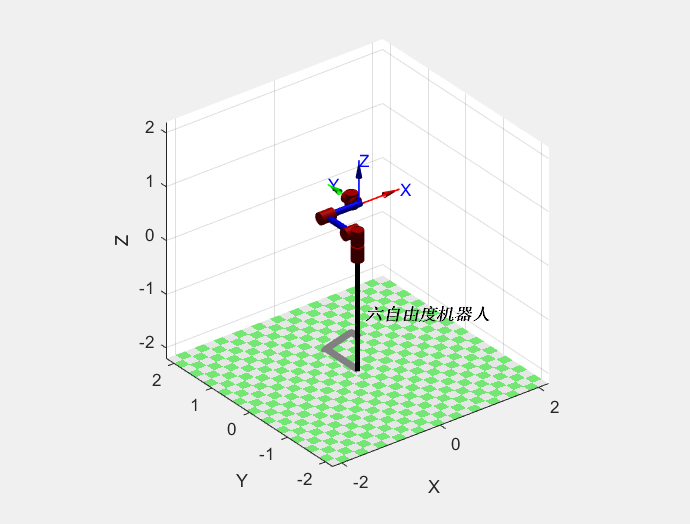
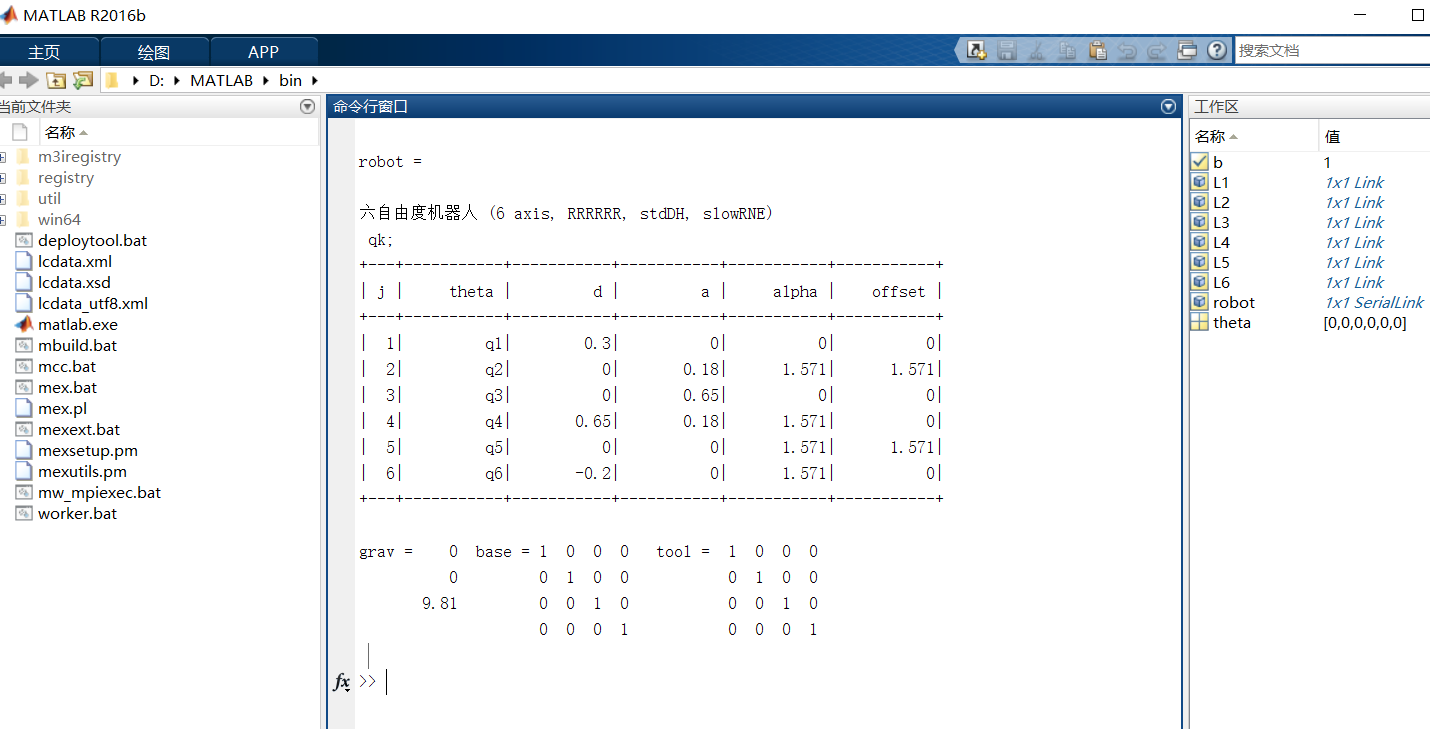
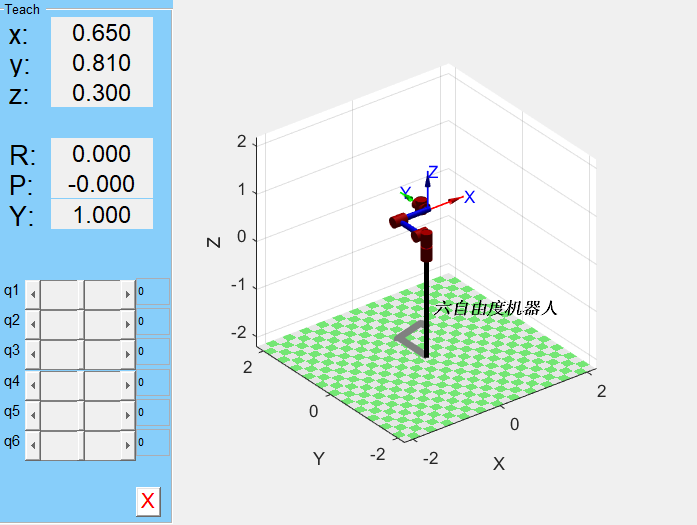
3.3 利用Matlab Robotic Toolbox建立机器人模型 9
第四章 六自由度机器人的运动学分析 12
4.1 机器人坐标系 12
4.2 齐次坐标及变换 12
4.3 机器人位姿 13
4.4 机器人的正逆运动学 14
第五章 基于Matlab的机器人运动仿真 16
5.1 轨迹规划的概念 16
5.2基于MATLAB的轨迹规划 16
5.2.1 直线轨迹规划 16
5.2.2 圆弧轨迹规划 21
5.2.3 组合轨迹规划 23
第六章 结论 24
参考文献 26
致 谢 27
第一章 绪论
1.1研究背景
随着工业的高速发展,各行各业对机器人的需求也大幅度提高,不论是从机器人的性能上还是机器人的数量上,人们对机器人的需求日渐提高。因此,必须加快对机器人的研究进展,研究出更高效智能的机器人,这样才能满足各行各业对机器人的需求。使用机器人代替人工完成一些繁重危险的工作,从而提高劳动生产力,减轻劳动者的负担,加快社会的发展,使人类生活水平得到大大的提高。要想提高未来生活生产的质量,对机器人的研究也迫在眉睫。
1.2研究的目的和意义
六自由度机器人在各种恶劣的工作环境中具有更好的适应能力,在高强度和高重复性的工作中,相较于人工劳动力也有更好的表现,在未来的工业发展中,它将会走进各种工作岗位中,从而补充社会劳动力。
目前,工业六自由度机器人已经能在各行各业中代替人类,完成各种工作任务,特别是在目前制造业劳动力成本逐渐上升的环境下,以更低成本、更高工作效率的机器人替代人工,是各厂家走向现代化、走向产业自动化的唯一方法。需求推动发展,现代化的工业发展需要大量的劳动力,而仅仅只依赖人工劳动力去完成产业链中的所有工作是不现实的,对于劳动力的高需求,使六自由度机器人发展速度越来越快。
六自由度机器人是具有高复杂性的机械系统,只有对其机械手进行运动学方面的研究和轨迹规划,才能准确分析其运动学规律,从而在实际生产中使机械手能不费吹灰之力就能在规定的工作空间内完成指定的运动过程,从而完成整个工作任务。
1.3国内外研究现状
六自由度机器人是一种可以实现向六个方向运行的机构,该机构当前应用较多。目前,国内外对于六自由度的机器人运动学求解问题有不同的研究方向,其中包括相对简单的正向求解问题和求解起来十分困难的逆向求解问题,本文认为在以后对六自由度机器人的研究过程中应该更多使用正向解方法,以此来提高对于六自由度机器人结构的理解程度。
目前,在国内外六自由度机器人的研究,有层出不穷的研究方向和应用领域。从大体上来看,对于六自由度机器人的研究有以下这些趋势:
用模块化的机械结构去组建机器人,用可以替换的模块化的关节和连杆去搭建一整个机器人,一旦出现任何故障,可以通过替换单个部件来使机器人正常工作,这从根本上解决了机器人维修难的问题,也提高了六自由度机器人的可操作性,也能提供不小的经济效益;用遥控器、电脑控制等远程控制器来操作机器人,在实际生产过程中能减少操作人员的失误率并且保障了操作人员的安全,是未来大型工业化机器人的核心技术;研究能用于机器人的各类传感器,除去常用的位移、速度和加速度传感器,将视觉、力觉、声觉等多种传感器应用到六自由度机器人中,为六自由度机器人提供“感官”,是未来智能机器人必须要用到的关键技术;对机器人各个零件进行标准化、系列化设计,以便于研究进展的交流,从而加快整个机器人行业的发展速度。
国外六自由度机器人较国内而言发展迅速,其中的代表型企业有日本的FANUC、Motoman,德国的KUKA等,这些公司已经成为其所在国家的核心企业,为国家的现代化创新发展作出了极大的贡献。我国机器人行业的四大龙头企业分别为新松机器人自动化股份有限公司、广东拓斯达科技股份有限公司、上海新时达机器人有限公司和埃斯顿(湖北)机器人工程有限公司[1],这些国产机器人公司也在不断引进先进人才,加快对机器人的研究和发展,在未来机器人领域有着很好的前景。我国的机器人研究虽然起步较晚,但是国内已经将六自由度机器人应用到诸多领域中,如汽车、食品、建工等方面,目前国内使用的机器人大多数来自国外机器人或者国外改良后国产机器人,存在着维修难、升级难等技术问题,因此,研究发展适合国内实际生产的六自由度机器人显得尤其重要。
1.4研究内容和思路
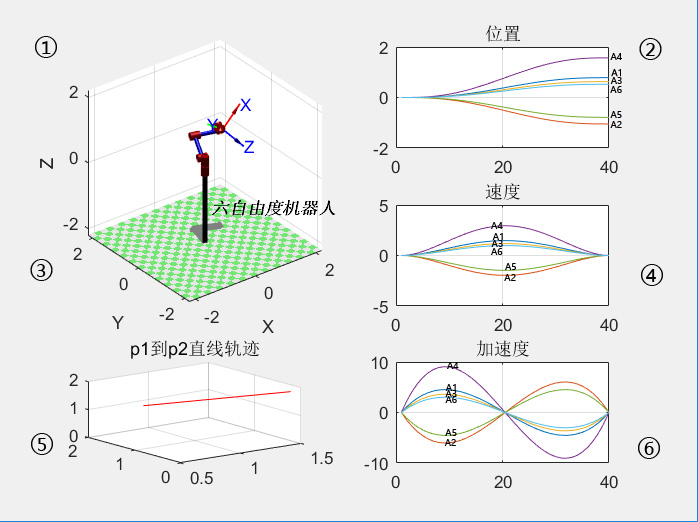
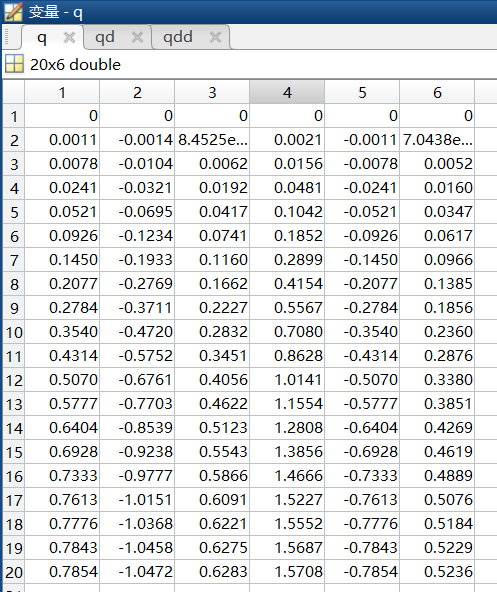
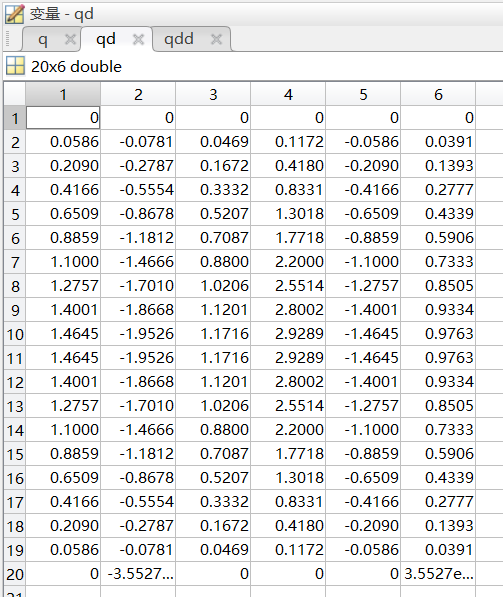
本文在MATLAB环境下,利用MATLAB-Robotics工具箱对KUKA30-3机器人进行建模,使用D-H参数法和link类函数将机器人各关节设计出来并连接在一起,得到该型号机器人的仿真模型,并分别对其在空间内进行直线轨迹的规划、曲线的轨迹规划,完成KUKA30-3机器人的运动模型仿真,并通过工具箱内的jtraj函数,得到N个插补点的实时空间坐标的数值,并且在Matlab软件中输出其各个关节的位置、速度和加速度曲线图像。从而为KUKA30-3机器人的运动规划提供编程方法和理论依据。
最后,在观察过实验室中KUKA抛光机器人的基础上,完成了对该六自由度机器人模型的组合轨迹规划,实现了其运动模型仿真,从而在未来的工作中实现KUKA30-3机器人在实际生产中能按照指定轨迹运动的目的。
第二章 六自由度机器人的介绍
2.1机器人的自由度
确定一个机器人的末端执行器在空间中的位置和姿态,需要多个独立参数,这些独立参数的数目,叫做机器人的自由度[2]。机器人末端执行器在空间中的运动是很复杂的,是由多个关节和多个连杆的复合运动组成的高复杂运动。机器人的两个杆件之间的一个关节往往是一个移动副或者一个转动副,只能算作一个独立运动的自由度,从这个角度上来看,机器人的自由度的数目就是机器人关节的数目。考虑在一个三维装置(x,y,z)中,若使其可以将工作空间内的任意一点移动到期望的位置,除了需要3个数据x,y,z来确定来点的位置,还需要确定物体关于所选位置的姿态r,p,n,这就意味着最少需要6个数据才能实现其功能。
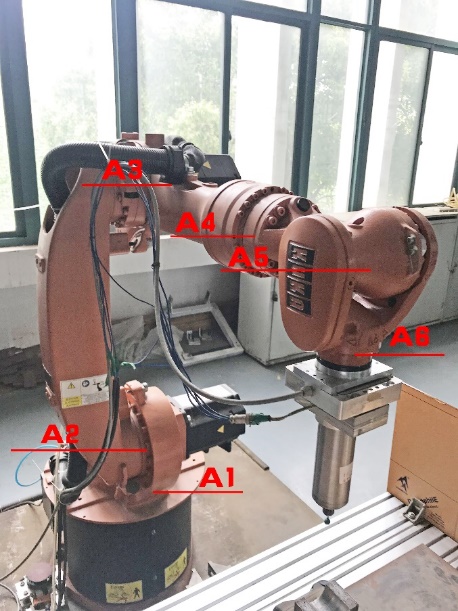
在以上基础上,我们得出了结论:六自由度机器人需要6个关节来完成按照期望放置物体的功能。图2.1是一款KUKA六自由度机器人的实物图:
 -
-
图2.1 KUKA机器人实物图
图2.1中的A1到A6分别代表该KUKA机器人的六个关节,通过这些关节的移动或者转动,机器人可以实现在工作空间内的任意运动。
2.2六自由度机器人的组成
六自由度机器人是一个完整复杂的机械系统,它由以下这些部分组成:
机械手。机器人的主要部分就是机械手,它由多个活动关节和连杆以及其它结构部件组成。
末端执行器。末端执行器是完成实际工作任务所需要的部件,一般是用来抓取物体,它通常被连接在机械手最后一个关节上[3]。在目前的六自由度机器人的最后一个关节上,通常会为末端执行器留下一个专门的接口,从而实现机器人的各种功能,如焊接、抛光、涂胶等。
驱动器。驱动器的种类有很多,我们所了解的常见驱动器大概有四种,包括伺服电机、步进电机、汽缸以及液压缸[4]。驱动器在机器人系统中实现的功能是接收来自控制器的控制信号,并通过这些信号来控制机器人相应的关节和连杆进行运动。
传感器。在机器人内部信息与外部环境进行通信时,起到作用的就是传感器,各个关节和连杆的运动信息和位置信息都将由传感器发送到控制器,从而使得机器人能确定该机器人此时的状态信息。
控制器。计算机把数据发送给控制器,控制器将数据处理后发送信息给驱动器,让驱动器实现各种目标任务。除此之外,控制器还能接收传感器的反馈信息,从而调节机器人的运动。假设要机器人完成一个任务,要求它的第一个关节角度必须是50°,如果该关节不在这个角度,控制器就会发送信号给驱动器,让驱动器控制该关节运动到50°,实际过程中,可能是发送电流给电机,或者是发送气流到汽缸,当该关节运动到了50°,发送信号就会停止。
处理器。处理器往往是计算机,被用作机器人关节运动的计算,确定任意一个关节需要移动多少角度和距离,才能到达预期的速度和位置。
机器人软件。机器人软件是用来控制处理器和控制器的部件,目前较为先进的机器人软件已经可以机器人完成一些像物料处理、涂胶、焊接等特定任务。是未来智能机器人的核心部件。
2.3六自由度机器人的技术参数
2.3.1机器人的主要技术参数
技术参数是选择、设计和应用六自由度机器人时所必须考虑到的内容,包括工作空间、自由度、精度、最大工作速度、承载能力和运行环境等。
工作空间是指六自由度机器人在运动时各关节能达到的所有点的集合,也被称作工作区域,特别要说明的是在机械手末端关节安装的末端执行器不被包括在工作空间内。工作空间的大小与很多因素有关,其中机器人各个关节和连杆的尺寸则联系最为密切,机器人的整体构型也能决定工作空间的大小。
自由度通常是指机器人具有的关节的数目,在六自由度机器人中,应该具有六个关节。如图2.1中的A1至A6。
精度包括定位精度和重复定位精度,前者是指机器手实际运动终点与预期终点位置之间的差异,可用多次重复测试结果的距离来表示,而后者是指机器人重复定位手部于同一目标点的能力,通常以多多次测试的实际位置的分散程度来表示。
最大工作速度通常是指六自由度机器人运动的最大稳定速度。最大工作速度越大,机器人完成实际任务时,工作效率越高。
承载能力是指六自由度机器人在正常运行状态时所运行抓取物体的质量,不仅仅指负载,还包括末端执行器的质量。各种类型的机器人,在抓取重物方面的能力也都不相同,承载的能力的大小也不仅仅取决于机器人的构件尺寸大小,还与发动机容量大小和机器人运动快慢有关。正常情况下,机器人在较慢运动速度的时候,拥有较大的承载能力,在实际生产过程中,考虑到安全,承载能力规定以机器人在高速度运动时能抓取的重物质量作为承载能力的指标。
机器人被应用与各种特殊的环境中工作,这些环境往往具有高温、潮湿度大、高气压和腐蚀性大等特点,因此在设计机器人的结构和选取材料时,需要特别注意。
2.3.2 KUKA30-3机器人的技术参数
KUKA30-3机器人是六轴中等负荷机器人,具有广泛的用途以及灵活的运用。其技术参数如下表所示:
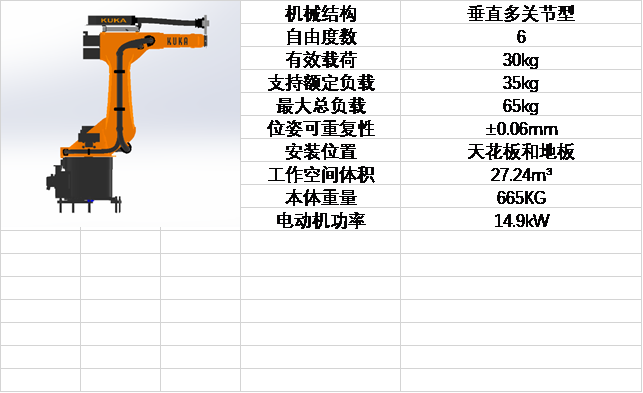
图2.2 KUKA30-3技术参数图
图2.2介绍了KUKA30-3机器人的基本技术参数。该型号机器人最大总负载大,工作空间大,能在多种复杂环境中使用,并且能灵活安装在天花板、地板甚至是墙壁上,在较复杂地形的工作中,也有较为出色的表现。
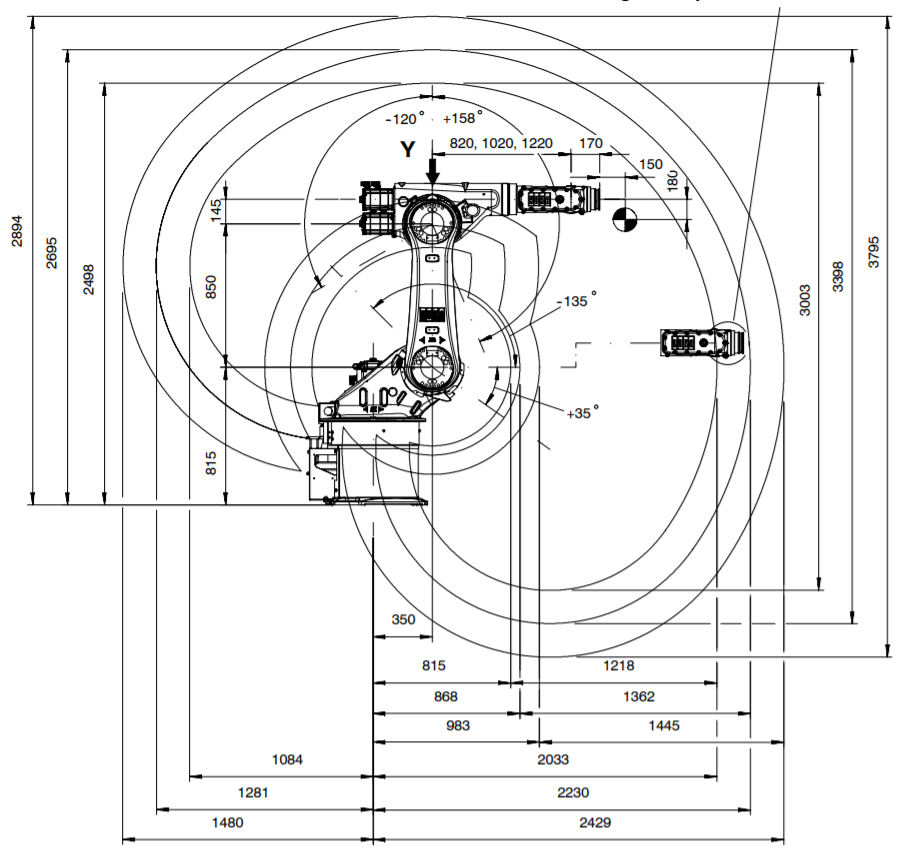
图2.3 KUKA30-3尺寸图
图2.3详细的介绍了KUKA30-3机器人各工件的尺寸大小,和各个关节运动的最大范围。
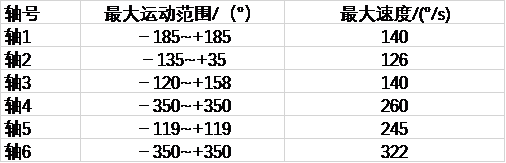
图2.4 KUKA30-3各轴参数图
图2.4介绍了KUKA30-3六个轴的运动范围以及运动最大速度,实际工作过程中六自由度机器人的机械手运动范围和运动速度不能超过该范围。
2.4 六自由度机器人的研究方向
对于六自由度机器人的研究,包括机器人自身基础研究和应用学科研究。
对六自由度机器人的自身基础研究,包括对六自由度机器人的运动学分析,以及对机器人的运动轨迹规,也包括机器人与传感和控制等多学科的交叉,机器人的发展趋势有软硬件结合、虚拟仿真和人机互动协作工作等方面。
对于六自由度机器人应用学科的研究,也有以下这些方向:从串联机器人延伸至并联甚至串并混联机器人;从单机器人工作到多机器人协作工作;从大型机器人到小型机器人甚至微型机器人完成狭小工作空间的作业;从刚体机器人到柔体机器人完成复杂空间的作业;将六自由度机器人与虚拟现实进行结合,通过人机交互实现远程遥控作业;将机器人与人工智能相结合,赋予其思考的能力从而替代人工完成作业。
在未来对六自由度机器人的研究方向上,人们将从实际需求着手,让研究成果能第一时间应用到实际生产中。
第三章 六自由度机器人的建模方法
3.1 D-H法建模
为了实现机器人不同的运动过程,我们要控制各个连杆中间的的关节,在一个具体任务的实现过程中,机器人是要进行连续运动的,因为机器人是一个完整的机械系统,每一个连杆在运动时,都会影响相邻连杆的运动。
为了准确地将一个机器人运动过程完整的表达出来,两位科学家 Denavit与Hartenberg,在1956年提出了D-H参数建模法。他们首先在六自由度机器人的六根连杆上,分别建立了固定坐标系,并将这些固定坐标系分别固定在六根连杆上,对于工作空间中的参考坐标系来说,它的平移和旋转过程,都可以通过3x3的矩阵来表达。任意两个相邻连杆之间的平移关系和旋转关系,都可以用D-H参数法来表示,是目前应用范围最大的机器人建模方法[5]。要通过Matlab-robotics工具箱对六自由度机器人进行仿真,首先要确定KUKA30-3六自由度机器人的D-H参数,然后通过Matlab-Robotics 工具箱中的相关函数来完成建模过程。先是使用6个link函数,来确定6个关节的对象模型,最后通过其中的robot函数对六自由度机器人整体进行建模。
L=LINK([alpha A theta D sigma],CONVENTION) (3.1)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: