可移动式监控系统结构及其运输包装设计毕业论文
2020-02-19 18:57:11
摘 要
今天,随着科学技术的飞速发展,智能小车也引起了人们的广泛关注,并已广泛应用于各行各业。此外,随着自动控制的快速发展,移动机器人各方面性能的优化已成为当今社会研究的热点,智能控制是自动控制研究领域的一个飞跃。智能小车又称轮式机器人。其较好的自动制导功能在石化工业中得到了广泛的应用。本文提出的移动监控平台,通过嵌入式技术、视频传输技术和无线网络通信技术,不仅可以实时查看运行路线和环境,还可以代替人工在恶劣的环境中完成大量复杂的工作。
技术的发展应以人的需求为中心,产品和环境的设计应更好地适应和满足人的各种需求。这一观点逐渐在产品设计的生产者和消费者之间形成了共识。现代设计师已经认识到,产品开发必须不断满足人们的各种需求。本文的主要工作如下:
- 查阅相关资料,完成可移动式监控系统总体方案设计;
- 对可移动式监控系统机构进行零部件设计
- 利用PROE建立可移动式监控系统机构小车、太阳能板支架和摄像头支架和风力发电装置支架设计;
- 对设备进行运输包装设计
关键词:智能小车、移动监控平台、强度、运输包装
ABSTRACT
Today, with the rapid development of science and technology, intelligent car has aroused people's wide attention, and has been widely used in all walks of life. In addition, with the rapid development of automatic control, the optimization of various aspects of mobile robot performance has become a hot spot in today's social research, intelligent control is a leap in the field of automatic control. Intelligent car is also called wheeled robot. Its better automatic guidance function has been widely used in petrochemical industry. The mobile monitoring platform proposed in this paper, through embedded technology, video transmission technology and wireless network communication technology, can not only see the running route and environment in real time, but also can replace human beings to complete a lot of complex work in a harsh environment.
The development of technology should be centered on the needs of people, and the design of products and environment should better adapt to and meet the needs of people. This view gradually formed a consensus between producers and consumers of product design. Modern designers have realized that product development must constantly meet people's needs. The main work of this paper is as follows:
(1) consult relevant materials and complete the overall scheme design of mobile monitoring system;
(2) design parts for mobile monitoring system.
(3) use SOLIDWORKS to establish the three-dimensional model of the movable monitoring system mechanism, and check the assembly interference of its parts;
(4) carry out finite element modal analysis of relevant parts to analyze their resonance conditions in the impact vibration environment
Key Words:Intelligent vehicle, mobile monitoring platform, assembly, finite element
目录
第1章 绪论 1
1.1 背景和意义 1
1.2国内外研究现状 2
1.2.1国外研究现状 2
1.2.2国内研究现状 3
1.3 本文内容 4
1.4 研究的方法、步骤以及思路 4
第二章 总体方案设计 5
2.1整体结构 5
2.2 材料选择 6
2.3本章小结 6
第三章 具体方案设计 7
3.1 小车设计 7
3.2 太阳能电池板安装支架设计 9
3.3升降支架设计 9
3.4 功率计算 10
3.4.1电机选型及功率计算 10
3.4.2摄像头选型 13
3.4.3太阳能电池板和风力发电机选型 14
3.5本章小结 15
第四章 三维建模及装配 15
4.1软件选择 15
4.2 可移动式监控系统机构三维装配 16
4.3本章小结 17
第五章 运输包装设计 18
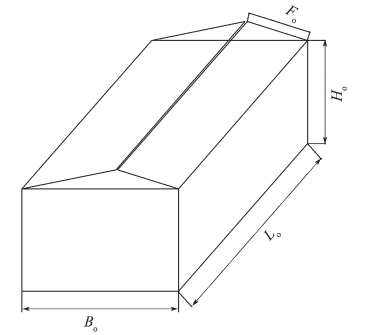
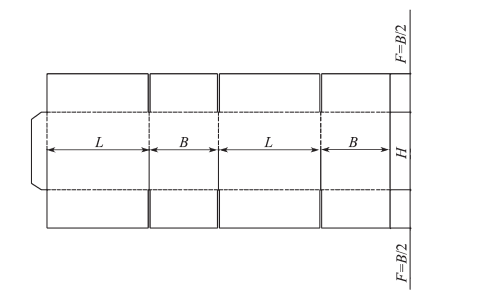
5.1瓦楞纸箱箱型的选择 18
5.2瓦楞纸箱经济选配 19
5.3缓冲材料选择 20
5.4本章小结 20
总 结 20
致谢 21
参考文献 22
第1章 绪论
1.1 背景和意义
随着人类社会的不断发展和科学技术的日益进步,移动机器人成为这种趋势
下的必然产物,而随着网络通信技术的成熟发展,视频监控也在其应用领域不断的得到发展,视频实时监控与移动平台构成的系统则具有更强的实用性,是目前
各高校和科研单位热门的研究方向。在科技迅速发展的今天,只靠人工劳动难以
跟上社会发展的步伐,在这种时代的驱使下,智能小车应运而[1]。它体积小、
灵活度高,可以帮助或代替人类完成一部分复杂、难度大的任务,比如喷漆机器
人在汽车行业,可以长时间工作,弥补人类体力不足的劣势;在自动化工业中的
焊接机器人,焊接效果均匀,动作精密准确;在检测及医疗方面,机器人也起到
了辅助的作用;帮助残疾人用餐,为残疾人送饭、热饭等[2]。除此之外,它也可帮助人类到危险恶劣的环境中作业,不仅效率高而且成本低,具有广阔的应用前景。比如煤矿采集这种高危作业,易发生矿难及救援爆炸事故,而由智能小车来辅助这些工作,并且由视频监控来实时查看当前环境状况,这些对人类生活和工作的困扰问题就会得到良好的解决。所以对移动监控小车的深入研究及创新非常必要,这也正是本课题研究的意义之一[1]。
中石油 西气东输等项目 管道深埋地下,管道有的时候会出现问题,所以就会在管道上面修建加压站或者作业站场来维护管道情况。中间加压站是指设在长输管道沿线给油流加压的作业站。油流沿长输管道输送时,由于沿程的摩阻损失或克服高程差,压力不断下降,需在沿途设置对油流加压的中间泵站,使油流继续往前输送,站上的主要设施是泵房和清管球收装置。天然气长距离输送中,必须隔一段距离设置一个天然气加压站,将管道中的天然气加压来抵消输送沿途中消耗的压力。一些用天然气的单位要求天然气压力大于管道输送到厂界的压力,就必须在厂内设置加压站,满足厂内天然气压力要求。在大量使用天然气作为加热源的场合,由于生产线工况不稳定而容易早成用气量大幅度频繁波动,同时由于起源管网方面的状况原因,仅靠阀门调节根本无法满足生产要求,天然气加压站是将煤天然气气混合、加压输送到用户的枢纽。站场指的是天然气管道沿线的一些压气站、清管站、分输站!管输天然气工艺设计要求,管道内天然气在输送过程中因能量损失导致压力降低,所以每隔数百公里为管线设置压缩机站场,有些地方也有清管站,也有为附近城市供气设置分输站场,或者沿线的维抢修队,统称为站场或者站队.由于作业站场和加压站占地非常宽阔,人工监测耗时费力,环境恶劣的情况下人工监测也会显得很不方便,这时候就需要移动自动监测系统来帮忙。
加压站或者站场附近偶尔会有第三方施工,站场施工内容复杂,有专业技术要求较高的电力,通信专业,也有专业性不强技术要求相对较低的场地土建施工,这就造成了项目施工人员自身素质参差不齐,部分工人安全操作技能和风险防御能力较低,项目整体员工的风险识别技能和安全防御能力取决于安全技能素质相对交叉的员工。“低,老,坏”现象时有发生,习惯性违章行为还经常出现,个别员工主观安全能动性不,安全意识不强,存在侥幸心理。有部分老员工还存在经验主义,凭自己多年来未发生过安全事故的经验,为了省事图方便而走“捷径”,不按照安全操作规程操作。还有部分员工认识不到安全事故造成的严重后果,觉得安全事故是电视里,教材上,报告里谈的事情,与自己无关。
站场施工所使用的设备多种多样,种类繁多,有起重设备,叉车,水泥搅拌站,切削设备,移动电站,焊接设备,装载机,挖掘机,拖拉机等。
不管是人员施工素质问题还是施工设备问题,稍微出现差错都会对站场或者人员造成不可挽回的严重后果,所以我们要无时无刻都要监测掌握站场的环境,以免发生意外我们可以及时发现以及处理。站场占地面积一般比较大,比较宽阔,而且施工环境比较危险,比较乱,人工监测就显得比较危险,比较耗时费力,而且晚上对于我们的人员来说也是比较难熬,所以我们需要设计一款无人自动监测系统来帮助我们监测施工站场周围的环境。站场场地较大如果放多个监测又显得麻烦耗材,所以我们可以给无人自动监测设备装备一个可移动的小车,组成可移动监测系统来帮助我们完成这样的工作。
1.2国内外研究现状
1.2.1国外研究现状
在国外,移动机器人的研究比较早,人们在 20 世纪 60 年代开始对移动机器人进行研究,在 1966~1972 年期间,美国斯坦福学院顺利研制出了一个地面自主移动机器人,取名叫 Shakey,这项伟大的胜利象征着机器人研究的开端,可以解决运动规划、感知和控制的问题。移动机器人是当今社会研究的热门方向,在自动化物流传输系统中也有重要的作用。20 世纪 80 年代,美国的国防部把地面智能移动机器人的研究列入了一项战略计划,它是由国防部高级研究计划局(DARPA)进行主张成立的,在此计划上投资了 6 亿美元,使移动机器人的研究向前迈了一大步[2],1982 年 FMC 公司研制的智能车,跟踪车速19km/h,避障车速 8km/h,可以进行路径规划[3]。在 1983~1995 年间,美国国防部研究计划局制定了“战略计算机计划”,美国 Maryland 大学研究了基于视觉导航的军用无人侦察越野车辆(ALV)[4]。1986 年后的近十年,机器人与智能系统计划(RIPS)被提出并制定了空间机器人计划[5]。Martin Marietta 公司在 1986 年研发了智能车 ALVin,它具有非结构化道路跟踪、避障以及三维地形图的确立等功能[6]。随着控制技术的日益成熟,移动机器人向实用化更加贴合,开拓更多的市场。美国 NASA 研制出“索杰纳”火星探测机器人,它是第一台实现在火星上进行科考的车辆[8]。
1.2.2国内研究现状
在国内,移动机器人的发展相对缓慢,但是进步很快,我国科研人员对移动
机器人的研究起步于“七五”,直到现在移动机器人在我国很多领域都获取了相
当不错的成绩[9]。国家移动机器人研究的开端是,“八六三”计划中遥控驾驶防
核化侦察车项目研究的确立[10]。清华大学智能与系统实验室成立,研发出我国最早的移动机器人,沈阳建立了机器人研究基地,成功研制了防爆机器人和AGV,对机器人的理论和基础元器件进行研究[11]。之后国内高校和公司也在这个领域取得了一定的成果,包括环境信息传感器技术、信息处理、移动机器人的控制技术和路径规划的研究等,研究了以环境势场法为基础的感知动作和模糊控制为基础的路径规划[12]。月球车是我国轮式机器人的典型代表,可自主行驶,
对月球进行探测、考察、收集分析样品等。哈尔滨工业大学和香港大学分别研制了导游机器人和自动导航车和服务机器人[13]。至今为止,国内机器人技术发展与完善的同时,也已经得到了各个方面的制造,研究具有实用价值的实时监控的移动机器人将是今后的发展趋势,我们需要不断的创新和发展。
1.3 本文内容
作为工业现场巡视的重要部件,对其性能要求越来越高,设计与研究领域十分广阔。本课题的主要任务是根据目前工业现场特别是石油化工现场情况,设计一款可移动式监控系统结构,并设计其运输包装机构,运用绘图软件PROE绘制机构的三维实体造型。所做主要工作如下:
1)查阅相关资料,确定本文研究内容;
2)对可移动式监控系统机构进行总体方案设计
3)利用PROE建立可移动式监控系统机构三维模型,并检查其零部件装配干涉情况;
4)对可移动式监控系统小车底架进行强度分析
1.4 研究的方法、步骤以及思路
在初期主要是资料的收集,在知网等相关网站上查看已有的相关产品论文和资料,在对课题有了大致的了解的基础上完成外文翻译、文献综述、开题报告等基本内容。具体工作步骤和思路如下:
图1-1 论文研究思路
总体方案设计
2.1整体结构
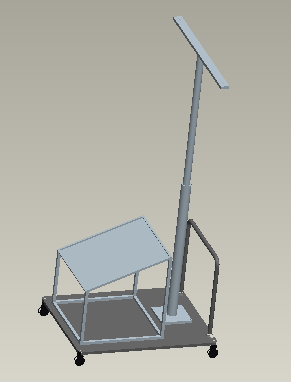
可移动监测系统设备整体外观图如图2-1所示,设计要求如下:
- 设计一辆可推拉移动的小车,底部装有4个万向车轮,依靠4各小电机进行驱动;
- 小车的上面设计一个太阳能电池板,白天可以吸收太阳能来为我们的移动监测设备提供能源,电池板和小车底部中间我们可以设计一个可锁定的箱子,里面放上一个功率较大的蓄电池,可以把白天电池板工作所产生的多余电量存储到蓄电池中,以提供晚上设备工作需要和天气环境不好没太阳时确保设备可以在蓄电池的电量下继续保持工作;
- 小车上面安装一个可升降的固体杆,杆子的中间可以设计一个可移动可旋转的高清摄像头,来完成我们的监测任务。杆子的顶部我们可以设计风力发电设备,在环境允许有风的情况下也可以为我们的设备提供能源。在摄像头和风力发电设备中间再加上一个电能转换板,为我们的设备转换电能维持工作;
- 太阳能电池板和风力发电装备所提供的功率大于摄像头和电机消耗的功率。

图2-1 总体效果图
2.2 材料选择
可移动式监控系统工作环境相对恶劣,安全稳定才是选材及尺寸设计所围绕的中心思想。载货板材料的重量过重会增加整个装置的灵活性,所以需要在保证强度的同时降低质量,同时材料强度要求极为关键,同时材料选择需要考虑材料的经济性、材料使用性能和工艺性能以及在这些原则下进行选用材料。
材料选择具有以下选择:
(1)安全性原则,保证具有足够的强度和刚度。
(2)实用性原则,具有实用价值。
(3)工艺性原则,方便加工,具有良好互换性。
(4)环境性原则,适应周围环境,具有环保性。
(5)创新型原则。
本文小车车架、太阳能支架和固定杆均选择制造业常用的Q235B。
2.3本章小结
本章主要介绍可移动式监控系统机构的整体设计方案和工作原理,从工艺和加工的角度选择本次设计常用的材料。
第三章 具体方案设计
3.1 小车设计
小车整体结构图如图3-1所示,包括四个万向轮,如图3-2所示,采用螺栓紧固连接,螺栓规格为M10,强度等级10.9,车体包括弯管、底板两部分组成,材料均选用Q235B,
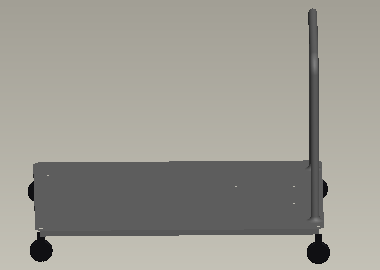
图3-1小车整体结构图
万向轮就是所谓的活动脚轮,它的结构允许水平360度旋转。脚轮是个统称,包括活动脚轮和固定脚轮。固定脚轮没有旋转结构,不能水平转动只能垂直转动。脚轮一般都是搭配用的,比如手推车的结构是前边两个固定轮,后边靠近推动扶手的是两个活动万向轮,如图3-2所示,

图3-2 万向轮结构
万向轮与底板连接形式如图3-3所示,
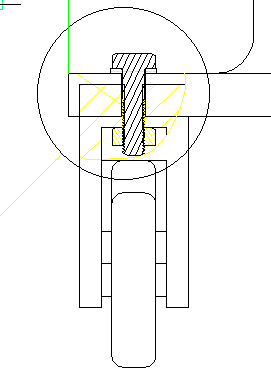
图3-3万向轮连接形式
3.2 太阳能电池板安装支架设计
太阳能电池板安装支架由结构件焊接而成,与水平面成20°夹角,方便采光,如图3-4所示
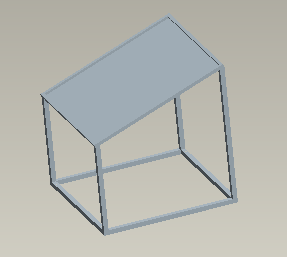
图3-4 太阳能电池板安装支架
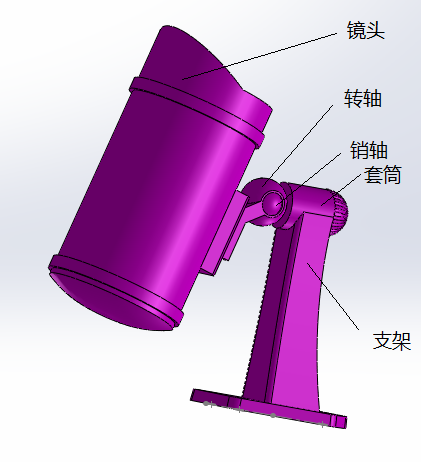
3.3升降支架设计
升降支架作用是同时安装摄像头和风力发电机,其材质为Q235B,底部布置四个M8螺栓紧固在小车地板上,顶部两侧各布置3个孔径为6mm的通孔,一侧固定摄像头,一侧固定风力发电机,如图3-5所示。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: