基于多帧融合的植物表型三维重构技术毕业论文
2020-02-23 18:22:29
摘 要
在“数字植物”的建立中,“数字可视化植物”是非常关键的一环。将三维重构技术运用到农学领域具有极大的意义,有利于促进农业数字化和可视化发展。本论文主要对黄瓜果实的三维重构技术进行了研究,通过对基于激光扫描得到黄瓜果实的三维点云数据建立三维点云模型,以期对黄瓜进行辅助育种作用。
在三维重构技术中,点云配准是最关键的一步,本文研究分析了三种点云配准的方法,第一种为结合了快速点特征直方图(FPFH)描述子和采样一致性初始配准(SAC-IA)算法进行初始配准的点云配准方法,第二种方法为标准的迭代最近点(ICP)算法的配准方法以及一种全局最优的迭代最近点(Go-ICP)算法,并对其进行比较分析。
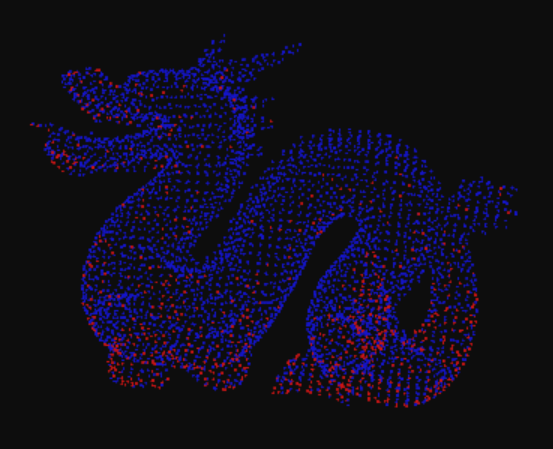
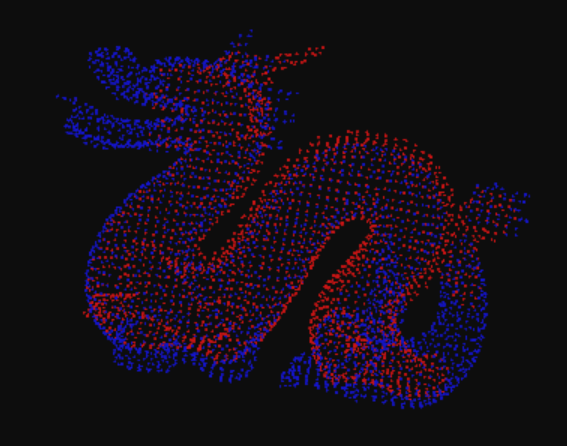
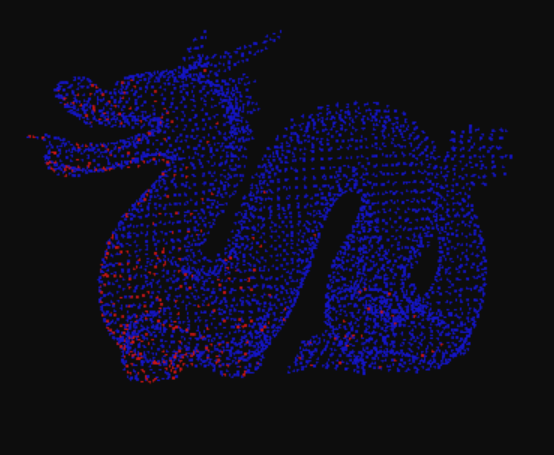
本文将结合了FPFH特征子和SAC-IA初始配准算法的点云配准方法应用于黄瓜果实三维重构之中。通过Kinect设备进行多视角数据采集,在经过直通滤波进行背景剔除,基于密度分析对点云进行去噪操作后,采用上述方法对不同角度的黄瓜点云数据进行点云配准从而实现黄瓜果实的三维重构。
关键词:植物三维重构;点云配准;快速点特征直方图;迭代最近点算法
Abstract
During the Numeral Plant process, Numerically Visualized Plants is always a vital one - piece environmental clause. Applying 3D registration skills to Agriculture is of great significance to promoting the development of agricultural digitalization and visualization. In this paper, the cucumber was used as the research object and reconstructed. The 3D model of the cucumber, expected to help the breeding of cucumbers, was reconstructed, which based on the point cloud data, collected by using laser scanning method.
Point cloud registration is one of the most important step in the process of 3D reconstruction. In this paper, three methods of point cloud registration, including the method which taking Fast Point Feature Histograms (FPFH) and Sample Consensus Initial Alignment (SAC-IA) algorithm as initial registration method, standardized Iterative Closest Point (ICP) algorithm, and the Globally Optimal Iterative Closest Point (Go-ICP) algorithm, was used and compared.
In this paper, the method, taking FPFH and SAC-IA algorithm as initial registration method, was be used to the process of cucumber 3D reconstruction. After collecting the multi-angle views of cucumber point cloud data, removing the background data by using the Pass Through Filter, point cloud data de-noising based on density analysis, and point cloud registration, the 3D point cloud model of cucumber was constructed.
Key Words:plants’ 3D reconstruction; point cloud registration; Fast Point Feature Histograms; Iterative Closest Point
目 录
第 1 章 绪论 1
1.1 研究背景及意义 1
1.2国内外研究现状分析 2
1.2.1三维重构方法 2
1.2.2植物的三维重构 3
1.3技术路线 3
1.3.1数据获取与预处理 3
1.3.2点云配准 4
1.4论文结构 4
第 2 章 点云配准算法 6
2.1点云初始配准算法 6
2.2点云精确配准算法 9
2.3全局最优的迭代最近点算法 10
2.4结果及分析 12
2.5本章小结 14
第 3 章 黄瓜果实的三维重构 15
3.1黄瓜点云数据获取 15
3.2黄瓜点云数据预处理 16
3.2.1黄瓜点云数据背景剔除 16
3.2.2黄瓜点云数据去噪 18
3.3黄瓜的点云配准 19
3.4本章小结 21
第 4 章 总结与展望 22
4.1总结 22
4.2展望 22
参考文献 23
致 谢 25
绪论
1.1 研究背景及意义
为了应对人口的迅速增长以及未来对全球粮食安全的不断增强的需求,农业工业必须通过自动化来加速,通过遗传改良技术提高作物生产率的速度。农业数字化与可视化已成为我国目前新农业的创新研究的重要工作之一,我国在数字化农业的研究和发展上也取得了非常多的成功,比如数字化的农业技术平台、数字化农业宏观监测系统、农业远程教育信息系统、温室环境智能控制系统等。建立“数字植物”要通过“数字可视植物”来构建植物的形态结构,然后将数字化植物的生理属性、物理属性和智能性与其形态结构相结合,构建内部生理结构和功能与外部的形态结构都与实际植物相一致的数字植物模型。实现植物的可视化与数字化是一项极其困难的研究工作。近些年来国内外的研究者们围绕植物三维重构这一主题开展了许多的研究,比如植物生长过程模拟、植物功能-结构并行模拟、植物器官三维建模、植物形态结构计算机辅助设计等[1]。
实现植物可视化的关键要素是三维重构技术。三维重建技术可以将我们所感知到的真实场景数字化地展现在我们眼前,恢复重建物体的三维信息,是近年来计算机视觉领域研究的热点,被广泛地应用于工业检测、军事、医学、航空航天、娱乐等多个领域[2]。使用三维重构技术对植物进行三维建模可以有助于我们还原数字植物的形态结构。成功的进行植物的三维重构可以帮助实现表型自动化,并为最终理解这种复杂关系做出贡献。这也对研究植物的形态结构,分析植物的生长规律,研究植物的生长机制、株型特征变化、产量变化规律以及作物育种等方面都具有重大的意义[3]。可以很方便的实现用户对农作物的长势及产量进行全方位的监测、管理与控制,方便人工进行干预,有助于促进现代化农业的发展。
本研究主要致力于对现阶段主要的经济作物进行三维重构方法的研究,以黄瓜果实为研究对象,利用微软Kinect设备从不同的视角对黄瓜果实进行扫描,获取其多视角的三维点云数据。因为最后重构出的黄瓜果实三维模型的精度很大程度上取决于点云配准算法的准确度,所以本文重点研究了三维点云的配准方法,并对黄瓜果实点云数据进行了多余的背景信息去除和点云去噪等前期工作,对预处理后得到的黄瓜果实点云数据进行快速重建,得到黄瓜的三维模型,从而为我们后期能够对黄瓜果实进行表型分析奠定了基础。
1.2国内外研究现状分析
1.2.1三维重构方法
数据获取是三维重建中非常重要的一部分,这些年来,多种三维数据采集的仪器的出现和发展为我们对事物或者场景进行三维重建提供了越来越多样的方法。对于植物的三维重构的实现,我们可以借助于诸如单目相机、立体相机、激光测距、Kinect等设备来实现。这使得在过去的几十年里,三维重构技术能够飞速地发展。
现在应用较为广泛的三维重构的方法主要有两种,包括基于二维图像的三维重构以及基于深度图像的三维重构。对于基于深度图像的三维重构技术,近年来国内外的学者做了非常多的研究[4-11],特别是对于点云配准算法的研究上。D Aiger和NJ Mitra, D Cohen-Or[12]等人提出了4点法(4-Points Congruent Sets,4PCS),一种快速地,鲁棒性好的3D点云配准方法。该方法通过对于给定的两个点云数据集中的点云数据集集中找出共面的四点作为基础,再根据其定义仿射不变比集合,找出点集中在一定范围内的所有与近似一致的共面4点对, 根据和,统计有多少点与点集的距离小于的点来作为评估,计算出最佳刚性变换矩阵。之后Nicolas Mellado,Dror Aiger和Niloy J Mitra[13]等人又提出了一种对于4PCS方法的加速方案Super 4PCS(Super 4-points Congruent Sets),该方法先记录点集中的两条直线的夹角,在点集中寻找匹配对时,通过计算两直线夹角是否在的一定范围里来排除一些点,从而加快配准速度。Vladislav Golyanik, Sk Aziz Ali和Didier Stricker[14]提出了一种用于点集配准的引力方法,该方法结合了多体模拟和刚体动力学,对于给定的点集中的每个点都被视作有自己的位置、速度和加速度,使用刚体旋转和平移运动的规律对其施加刚性约束,使用基于奇异值分解(SVD)的公式来寻找最优旋转矩阵从而解旋转。除此之外,国内外学者对于常用的迭代最近点 (Iterative Closest Point, ICP)算法的改进上也做出了非常多的研究,Shihui Ying[15]等人提出了Scale-ICP算法,在ICP算法基础上加入了尺度因子实,将大尺度的三维数据集配准问题转换为其转换为七维非线性空间上的二次约束优化问题,并设计了一种基于奇异值分解的快速且准确的迭代过程,实现了两个不同尺度距离图像的配准。Jiaolong Yang, Hongdong Li和Dylan Campbell[16]等人针对标准ICP算法容易陷入局部最优的问题提出了全局最优ICP算法(Globally Optimal ICP, Go-ICP),该算法依赖于空间搜索的思想扩展出的三维下的方法,通过基于以标准ICP算法作为搜索过程中的子程序的分支界定(Branch and Bound, BnB)理论进行全局优化,用于需要最优解或者没有良好初始化的情况下的点云配准。
1.2.2植物的三维重构
植物的三维重构主要基于图像、模型和扫描数据集。BI Loch [17]使用激光扫描仪器对四种不同类型的叶片进行数据采集,选择有限元插值法对采集到的两个表面进行拟合,并引入了线性三角形的边界插值法和CT(clough-tocher)技术对叶片建模。P Raumonen,S Kaasalainen 和M Kaasalainen [18] 等人提出了能够根据从激光扫描以上获取的数据自动的模拟树枝的体积、大小和分布的方法,他们从多个不同的视角对树木冠层进行扫描并获取其点云数据,并对点云数据进行了分割,完成了树枝的重建工作。TT Nguyen和DC Slaughter [19]等人提出了一种基于照相机的植物三维重构系统,该系统结合了两种硬件结构来增强技术特性和软件算法,提出了三维点云配准和植物特征测量方法,演示了从不同视角拍摄的多对立体图像生成整个植物的3D模型的能力,并且不需要破坏性地切除植物的任何部分,成功地预测了表型特征,如叶片数、植物高度、叶大小和节间距离等。SH Han和TF Burks [20]对柑橘树冠进行了三维重构,将其运用于可视化的侦察系统以及预估机器人收获果实方面,他们通过视频相机来采集多序列的视图,并使用了一种基于连续图像间初始特征点的SURF(Speeded Up Robust Features)匹配算法对柑橘树冠完成了重建。赵春江等人使用单目相机对玉米植株采集了两幅图像,对其进行骨架重建工作[21],他们使用照相机对玉米植株进行了拍摄,并从其中提取出了植株的骨架信息,使用模板匹配算法计算出了其三维坐标信息,最后成功的对玉米植株的骨架进行了重建。Rousseau D和Lucidarme P [22] 评估了深度成像系统在植物表型分析中的三维测量的潜力,提出了一种原始算法来从单个图像中分割植物的深度图像。Chen J M和Liu X [23]等人经由Kinect深度传感器装置获取果树冠层的深度图像数据的过程,获取他们的三维坐标信息,对果树冠层进行快速的三维重构。
1.3技术路线
本课题主要从植物三维点云获取方法、点云数据的预处理和点云配准等方面展开研究。技术路线图如图1.1所示。
1.3.1数据获取与预处理
本文采用微软kinect设备采集黄瓜果实的深度图像数据,获得黄瓜果实不同视角的深度图像并以pcd文件格式保存。确定包围盒后通过直通滤波对点云数据进行背景剔除,再通过统计滤波对点云数据进行去噪处理。
1.3.2点云配准
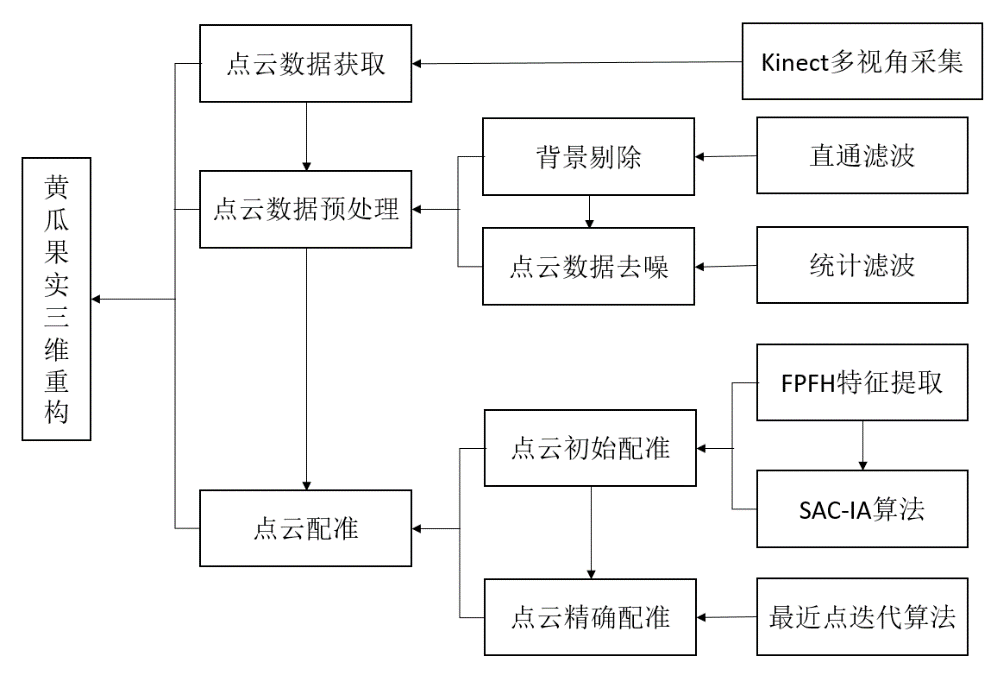 本课题研究了三种核心为ICP算法的点云配准方法,包括了结合FPFH(Fast Point Feature Histograms)和SAC-IA(Sample Consensus Initial Alignment)算法作为标准ICP算法的初始配准算法的点云配准方法、标准的ICP算法以及全局最优的ICP(Go-ICP)算法。通过结果分析,选用了第一种配准方法对黄瓜果实的点云数据进行了配准操作。
本课题研究了三种核心为ICP算法的点云配准方法,包括了结合FPFH(Fast Point Feature Histograms)和SAC-IA(Sample Consensus Initial Alignment)算法作为标准ICP算法的初始配准算法的点云配准方法、标准的ICP算法以及全局最优的ICP(Go-ICP)算法。通过结果分析,选用了第一种配准方法对黄瓜果实的点云数据进行了配准操作。
图1.1 技术路线图
1.4论文结构
本文由4章组成,各章的内容安排如下:
第1章:绪论。本章节主要介绍了本课题“基于迭代最近点算法的黄瓜果实三维重构”的研究背景及意义,对目前国内外的三维重构技术以及植物三维重构研究现状进行了分析,并简单概括了本课题的技术路线。
第2章:点云配准。因为在三维重构中,如何有效的进行点云配准是非常关键的一部步,所以本文将点云配准单独列为一章,从所结合了FPFH描述子和SAC-IA算法的配准方法以及标准ICP算法来对本文所使用的点云配准方法进行介绍,并介绍了一种全局最优的迭代最近点算法,并对本文所使用方法进行评估,与标准的最近点迭代算法以及全局最优的ICP算法进行比较。
第3章:黄瓜果实的三维重构。本章主要介绍本文中所提到的基于基于特征提取和SAC-IA算法的ICP算法在实际数据——黄瓜果实点云数据上的应用。首先介绍了本课题所使用的黄瓜果实的三维点云数据的来源,然后对本文所采取的点云数据背景剔除和离群点去噪的方法进行了描述,最后给出了点云配准的结果。
第四章:总结。本章对本课题的研究工作进行总结,分析目前研究所存在的不足,以及对黄瓜果实的三维重构这一研究主题进行进一步研究的展望。
点云配准算法
近年来,在诸多点云配准算法之中,迭代最近点(Iterative Closest Point, ICP)算法是被研究及使用的最为广泛的算法之一,这也是本文所提到的点云配准算法中的核心算法。该算法通过找到两个待配准点云之间存在对应关系的点对,并计算其变换矩阵的方式,最后可以得到两个点云数据之间最优的变换矩阵。但是在两个点云位置相差较大的时候,使用标准的迭代最近点算法进行点云配准非常容易陷入局部最优,使得最终会产生配准失败的结果,所以本文除了介绍迭代最近点(ICP)算法外还研究了为解决局部最优问题的配准方法,一种方法在配准过程中结合了FPFH描述子和SAC-IA初始配准算法,对两个待配准的点云数据集进行初始配准操作,将得到的刚体变换矩阵作为ICP配准算法的初始估计,以解决因位置偏差过大而导致的局部最优的问题;第三种方法通过引入分支界定(Branch and bound, BnB)原理来解决局部最优问题。
2.1点云初始配准算法
本文所研究的第一种方法是先对点云数据进行FPFH描述子的提取,再采用SAC-IA初始配准算法计算出我们所获得的特征之间的对应关系来完成初始配准。
 FPFH是对于点特征直方图(Point Features Histograms, PFH)[24]的一种改进,PFH是有信息量的位姿不变的用于表达点处的表面模型属性的局部特征,通过结合点的最近的个邻域点的某些几何关系来计算,依赖于三维点的坐标信息以及其预测的表面法向量。简单来说,就是通过考虑各个预测表面法向量的方向之间的影响来获得最好的采样平面,所以最后我们所得到的高维空间与每个点的表面法向量的方向有关。
FPFH是对于点特征直方图(Point Features Histograms, PFH)[24]的一种改进,PFH是有信息量的位姿不变的用于表达点处的表面模型属性的局部特征,通过结合点的最近的个邻域点的某些几何关系来计算,依赖于三维点的坐标信息以及其预测的表面法向量。简单来说,就是通过考虑各个预测表面法向量的方向之间的影响来获得最好的采样平面,所以最后我们所得到的高维空间与每个点的表面法向量的方向有关。
图2.1 PFH计算影响区域
图2.1为点特征直方图的影响区域图。点是要计算PFH描述子的点,将置于半径为的圆圈的中央,然后用一个网格将它个相邻点(距离点的距离小于半径)相连,计算点的邻域内所有的点对和之间的欧氏距离和与这两点相关联的法线和法线的角度偏差。
图2.2 法线角度偏差
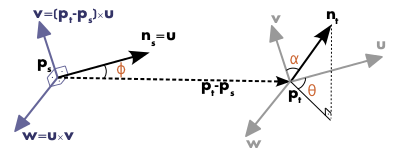 对于求法线间的角度偏差,我们可以首先固定一个直角坐标系(如图2.2所示),将其中一个法向量作为轴,将作为轴,作为轴,如公式(2.1)所示。
对于求法线间的角度偏差,我们可以首先固定一个直角坐标系(如图2.2所示),将其中一个法向量作为轴,将作为轴,作为轴,如公式(2.1)所示。
(2.1) |
并且可以得到两法向量的角度偏差如下:
(2.2) |
PFH算法的时间复杂度为,而FPFH可以将时间复杂度下降为。该方法通过以下两个步骤来简化直方图特征的计算:
1)对于每个查询点,我们只计算它的简化点特征直方图(Simplified Point Features Histogram, SPFH),即点本身与他的邻域点之间的关系,而不需要计算该邻域中所有点对之间的关系,如公式(2.2)所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: