基于方向的车辆重识别方法研究毕业论文
2021-12-09 17:17:58
论文总字数:25459字
摘 要
进入21世纪后,我国经济水平飞速提高,汽车使用量大幅度提升,并且深度学习有了很大的发展,因此,车辆重识别研究受到了越来越多人的关注。车辆重识别,即在一定范围内的交通监控系统中,判断不同区域内摄像机拍摄到的车辆图像是否属于同一辆车,其重点是研究跨摄像头的车辆检索问题。
由于摄像头安置的地理位置以及位置上车道的不同,导致了被检索的数据集中的车辆的方向会有或多或少的偏差,可能会发生方向差别较大的同一辆车被判定为不同车辆的情况。因此,进行基于方向的车辆重识别研究很有意义。
本文主要对目前的基于方向的车辆重识别研究方法进行了调研,分别研究从增加辅助信息、生成多视角、设计新型网络以及设计损失函数四个方面进行改良的车辆重识别方法,最后提出了使用新型的深度学习网络交互聚集网络(IANet)进行车辆重识别。该网络通过插入轻量的IA块,在增加少量计算量的情况下,改善了原有网络的特征表达能力,主要针对的是传统卷积神经网络对于由于视角偏差而造成的车辆比例的变化的问题无法自适应的缺点,经实验表明,通过降低视角偏差带来的影响,IANet提升了其原型网络ResNet-50的性能,并且对比之前提出的一些基于方向的车辆重识别方法,其仍然有一定的优势。
关键词:车辆重识别;IANet;IA块;视角偏差;卷积神经网络
Abstract
After entering the 21st century, our country's economic level has increased rapidly, the use of automobiles has been greatly improved, and deep learning has made great progress. Therefore, research on vehicle re-identification has attracted more and more attention. Vehicle re-recognition, that is, in a traffic monitoring system within a certain range, to determine whether the vehicle images captured by cameras in different areas belong to the same vehicle, the focus is on cross-camera vehicle retrieval.
Due to the geographical location of the camera and the different lanes on the location, the direction of the vehicles in the retrieved data set will be more or less deviated, and it may happen that the same vehicle with a large direction difference is judged as a different Happening. Therefore, it is meaningful to conduct direction-based vehicle re-identification research.
This paper mainly investigates the current direction-based vehicle re-identification research methods, and researches the improved vehicle re-identification methods from the aspects of adding auxiliary information, generating multiple perspectives, designing new networks, and designing loss functions. A new type of deep learning network interactive aggregation network (IANet) is used for vehicle re-identification. By inserting a light-weight IA block, the network improves the original network's feature expression ability with a small amount of calculation, mainly for the traditional convolutional neural network to change the proportion of vehicles due to viewing angle deviation. The problem is that the problem is not adaptive. Experiments show that by reducing the impact of viewing angle deviation, IANet improves the performance of its prototype network ResNet-50, and compared with some of the direction-based vehicle re-identification methods previously proposed, it still has certain The advantages.
Key Words:Vehicle re-identification; IANet; IA block; View-point deviation; Convolutional neural network
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.3 论文的主要研究工作 4
1.4 论文结构安排 4
第2章 基于方向的车辆重识别的方法简介 6
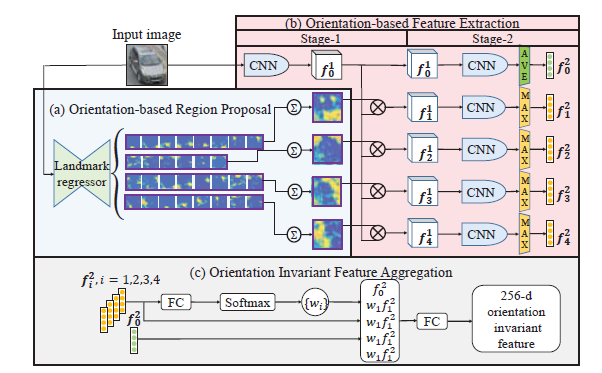
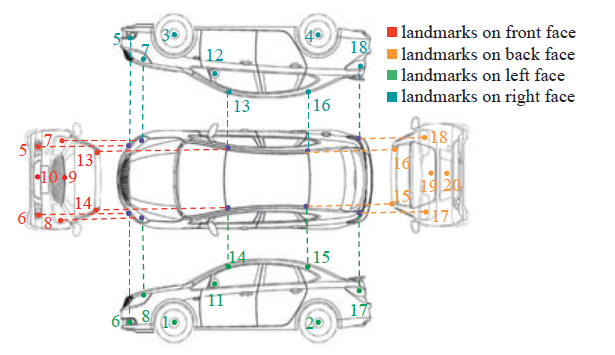
2.1 方向不变特征嵌入 6
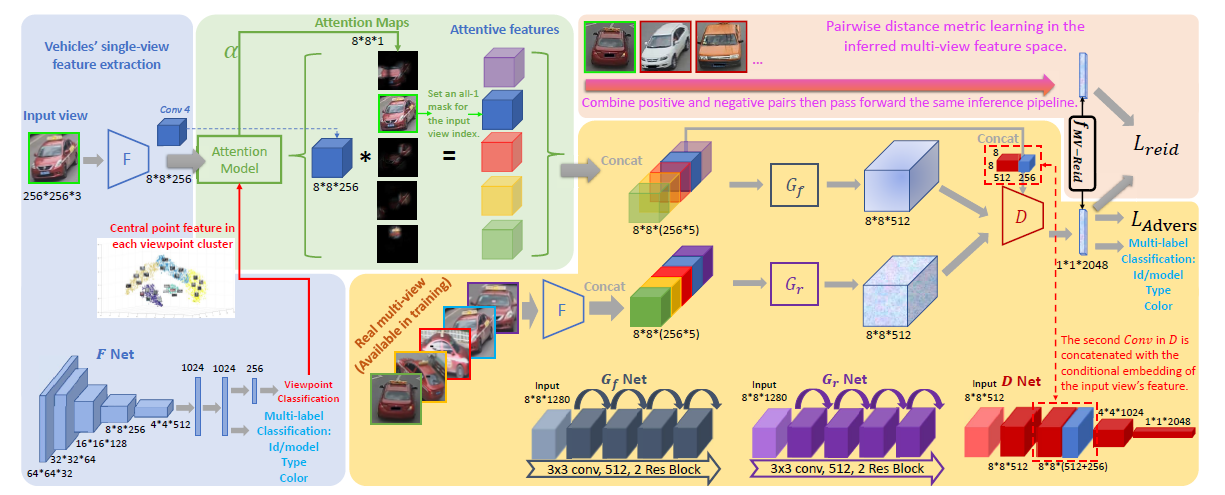
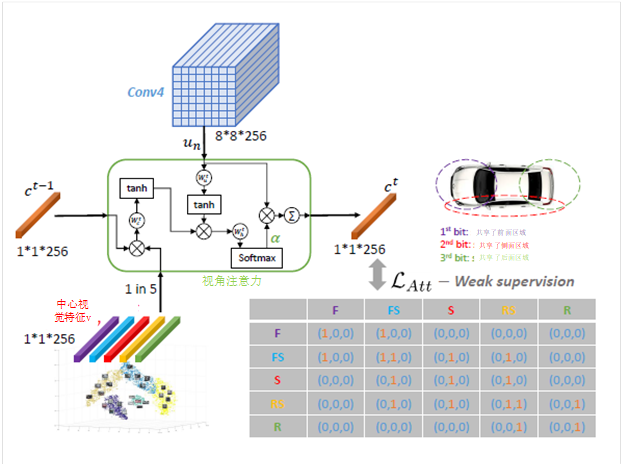
2.2 基于视角感知的注意力模型 8
2.3 视点感知网络 10
2.4 针对不同视角设计不同损失函数 11
第3章 应用于车辆重识别的交互聚集网络 13
3.1 问题描述 13
3.2 交互聚集网络架构 14
3.2.1 简介 14
3.2.2 SIA模块 14
3.2.3 CIA模块 17
3.2.4 IA块 18
第4章 实验结果与分析 19
4.1 数据集 19
4.1.1 VeRi数据集 19
4.1.2 VehicleID 21
4.2 实验环境 21
4.3 评价指标 21
4.3.1 Rank-n指标 21
4.3.2 mAP指标 21
4.4 交互聚集网络的评估 22
第5章 总结与展望 23
5.1 总结 23
5.2 展望 23
参考文献 24
致 谢 27
第1章 绪论
1.1 研究背景及意义
当今社会,几乎每个家庭都拥有一辆或者几辆汽车,这象征我们人类文明的发展,但与此同时,汽车数量的增加为国家的管理也带来了很多的麻烦,城市的交通问题也越发引人注目。而随着科学技术的发展,人工智能逐渐进入人们的视线,将人工智能应用于交通问题,即研究发展智能交通系统(Intelligent Transportation System ,ITS),将能够方便快捷地解决现有的交通问题。而在智能交通系统中,车辆追踪与重识别技术更为重中之重。在公共安全和智能交通系统中,从大规模监视图像和视频数据库进行车辆搜索和重新识别的需求目前也在激增。车辆追踪技术主要分为单摄像头和双摄像头两种模式,而单摄像头车辆追踪的追踪结果往往并不能达到现代公安系统的要求,不能展示目标车辆的动态轨迹。因此,当前对车辆追踪技术的研究主要集中在多摄像头拍摄的不同场景中的车辆重新识别(Re-ID)上。与车辆检测、跟踪或者分类的问题不同的是,在大的交通监视场景中,车辆重新识别的问题可以被认为是附近的迭代图像搜索问题。具体地阐述就是,若已知特定区域中的一辆车辆被相机拍摄下来的图像,车辆重新识别的任务是找到由不同地点的另一相机捕获的同一车辆的图像。为了达到这个目标,仅允许使用车辆外观信息和辅助信息(车辆型号等),例如拍摄时间和位置信息。此外,所获取的图像的目标(例如视角,拍摄时间,天气等)不会受到限制(与特定图像不同也是被允许的)。车辆重新识别技术是随着多摄像机跟踪技术的发展而发展起来的,主要用于确定由摄像机在不同方向和不同位置捕获的不同图像中的车辆是否是同一辆车。车辆重新识别是一项综合技术,涵盖了许多学科领域,例如计算机视觉、模式识别、机器学习等,其应用也十分的广泛,在智能视频监视,安全和刑事调查等领域都有能涉及到的地方。虽然车辆重识别受到了较多的关注,但如今的车辆重识别技术仍面临着诸如光照强度、不同摄像头中车辆角度及姿态、近似车型等困难。
而在如今的车辆重识别研究中,由于拍摄照片的摄像头的位置不同,导致同一车辆在不同图片中的视角不尽相同,这导致了不同图片中的同一辆车看起来差别很大,为车辆重识别研究带来了很大的困难。如何解决由于拍摄角度不同而导致的重识别偏差,是当前研究的一个热点和难点。这种由于视角的不同而产生的车辆再识别问题,主要分为两种类型:类内偏差和类间相似。类内偏差即不同相机拍摄的同一辆车有很大不同,如图1.1中的Vehicle1;类间相似即相同型号的车辆在不同图片中可能非常相似,如图1.1中的Vehicle2。
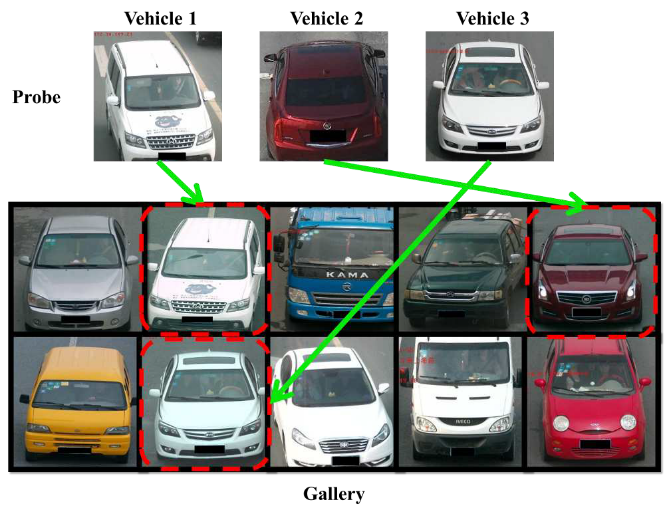
图1.1 类内偏差和类间相似
1.2 国内外研究现状
2003年,Porikli[8]通过相关系数矩阵对相机拍摄的图片对进行了非参数建模,得到了目标在不同相机之间的颜色分布变化,揭开了重识别研究的序幕,第一次做到了指定目标的跨视域匹配。在重识别领域,首先引起计算机界关注的是行人重识别,行人重识别的技术也相对比较成熟,而车辆重识别仍然是一个比较前沿的领域。2006年,Hinton等[4]在《Science》上发表文章,第一次阐述了深度学习(Deep Learning)的概念,即运用梯度下降的方式调整“自编码网络”的参数。该方法的出现使得计算机视觉领域有了巨大的进展[5-7]。而在2012年的时候,在大型视觉识别挑战ImageNet比赛的过程中,卷积神经网络(Convolutional neural network,CNN)首次进入了人们的视线,引起了大量的关注,随后被应用于语音识别、人脸识别等多个不同的实际应用中,都取得了较好的鲁棒性和准确性[9]。再后续的研究中,学者们在不断的尝试研究出改进的CNN网络,以达到更好的效果。2016年,Liu等[24]发表论文公布了VeRi数据集,成为了车辆重识别发展历程上的分界线,将车辆重识别历程划分为两个阶段。在提出之前,车辆重识别任务缺乏大规模高质量的数据集,且主要使用辅助设备例如各类探测器[25]完成车辆重识别。从那时起,深度学习也出现在学术界,学者们经过研究发现了许多车辆重识别算法,并且大多数方法都使用了当时比较热门的深度学习框架。在车辆识别领域中,彭清[10]及马永杰[11]等首先将卷积神经网络应用于实践,即用卷积神经网络实现单摄像头画面中的车辆识别,使用CNN SVM模型,有效地提高了在当时的车辆识别的正确率。而Kumar [13]等将三重嵌入技术应用于多摄像机识别网络中的车辆重识别问题中,也取得了成功。在CNN网络中,也有J.Sochor[2]等应用3D矩形框的相关的信息作为输入,提高识别车型过程中的正确率。
在最近的车辆重识别研究中,为了提高车辆重识别的精度,很多优秀的算法被提出。主要分为四个类型[23]:利用多维度信息、基于度量学习、基于方向以及利用时空信息。基于多维度信息在车辆重识别中的应用主要是使用多个维度的信息对深度学习神经网络的训练过程进行监督,提高重识别的正确率,如Liu等[15]将车牌信息和时空信息结合对训练过程进行监督,取得了较好的结果。基于度量学习的再识别技术在2016年被Liu等[3]首次提出,度量学习中,有一个特征空间的概念,空间的分布与样本是否属于同一类别相关联,属于同一类别则距离较近,反之则较远,其主要使用三元组损失函数来完成度量学习任务。杨彪等[12]则采用了基于改进DRDL模型的车辆重识别算法,这也是基于深度卷积网络改进的,是一种三元函数深度卷积网络。该算法使用ResNet的残差学习结构来解决网络退化的问题,有效的提高了重识别的鲁棒性。基于方向的车辆重识别方法旨在解决车辆重识别中由于视角偏差而引起的识别精度下降的问题。在解决此类问题时,大多是关注一些辅助的信息,来进行车辆的细粒度识别[26-29]。另一种利用时空信息提高重识别的精度的问题也十分的有效。即在短的时间间隔内,距离较短的摄像头捕获的相似图片更有可能为同一辆车。Zhong[1]等提出了一种用于辅助车辆重识别的车辆姿势时空模型(PGST),在基于外观模型的基础上,嵌入姿势指南时空模型,更好地实现车辆的重识别。如果能够研究出较好的网络结构以及损失函数,使用深度学习方法从大量图像中迅速且无误地找到目标车辆,高效率实现车辆重识别就是很有可能的。
请支付后下载全文,论文总字数:25459字
相关图片展示: