基于足底压力的外骨骼机器人步态检测方法及实现毕业论文
2020-02-17 23:02:27
摘 要
基于足底压力的外骨骼机器人步态检测方法是控制外骨骼机器人行走的基础。外骨骼机器人既可以帮助非健康人们行走的同时也可以减少健康人们在承载负重时减轻疲劳与关节损伤。因此,对外骨骼机器人行走时的准确步态检测显得非常重要。本文完成的主要内容如下:
(1)分析人体正常步行状态,基于足底压力数据完成步态相位的划分。以双脚是否着地为划分标准,将人体步行状态划分成具体的16种步态相位,基于这些步态相位进行外骨骼机器人步态相位检测。
(2)阈值法实现步态相位检测。采用TAM阈值法和Lopez-Meyer阈值法对外骨骼机器人足底压力数据进行二值化,利用Matlab软件编程实现步态相位检测。阈值法运算速度快但这两种算法均无法实现实时数据的步态相位检测。
(3)针对实时状态下要完成步态相位检测的问题,使用比例法实现步态相位检测。采用比例法对足底压力数据中左右脚与脚跟脚掌进行比例化,利用Matlab编程设计算法,设置合适的比例因子判断双脚是否着地,完成双脚步态相位检测。利用脚跟脚掌的占重比,区分着地状态,完成单脚步态相位检测。该方法适用于实时状态下的步态相位检测系统,更贴近于实际应用。
(4)研究了两种基于足底压力的外骨骼机器人步态相位检测方法的异同点。分析了比例法在处于正常行走状态下步态相位检测的可靠性,与两种阈值法的可靠性达到了89.16%和89.46%,验证了比例法适用于步态相位检测,并解决了检测实时数据的问题。
关键词:外骨骼机器人;足底压力;步态相位检测;
Abstract
The gait detection method of exoskeleton robot based on plantar pressure is the basis of controlling exoskeleton robot walking. Exoskeleton robots can not only help non-healthy people walk, but also reduce fatigue and joint damage of healthy people when carrying weight. Therefore, accurate gait detection for exoskeleton robots is very important. The main contents of this paper are as follows:
(1) The normal walking state of human body is analyzed, and the gait phase is divided based on plantar pressure data. The human walking state is divided into 15 specific gait phases according to whether the feet touch the ground or not. The gait phase of exoskeleton robot is detected based on these gait phases.
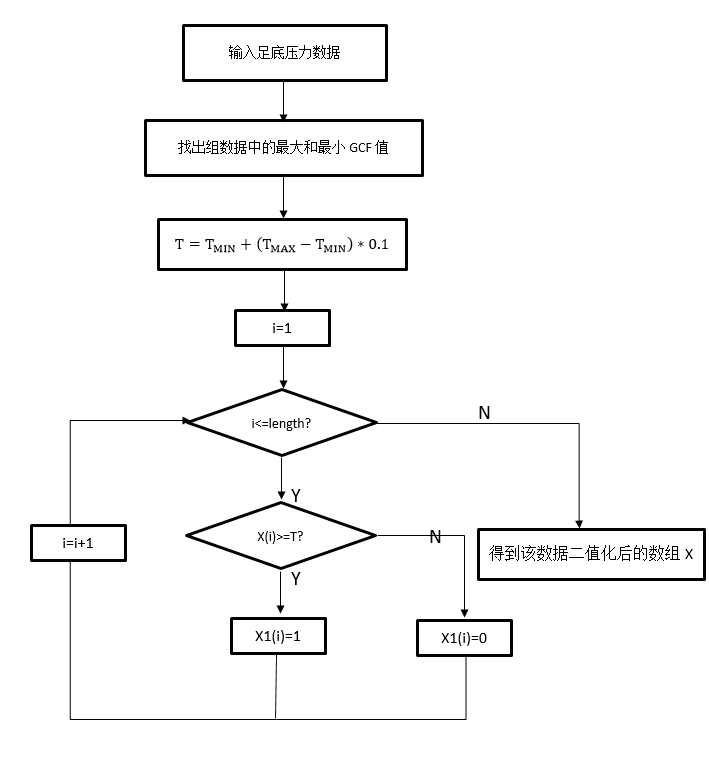
(2) Gait phase detection is realized by threshold method. TAM threshold method and Lopez-Meyer threshold method are used to binarize the plantar pressure data of exoskeleton robot, and the gait phase detection is realized by using MATLAB software programming. Threshold method is fast, but neither of them can realize gait phase detection of real-time data.
(3) To solve the problem of gait phase detection in real-time, we use proportional method to realize gait phase detection. Proportional method is used to proportionate left and right feet and heel soles in plantar pressure data. Using the MATLAB programming design algorithm, the appropriate proportion factor is set to determine whether the feet land or not, and the gait phase detection of both feet is completed. The weight ratio of heel and sole is used to distinguish the landing state and complete the phase detection of single foot gait. This method is suitable for real-time gait phase detection system, and more close to practical application.
(4) The similarities and differences of gait phase detection methods of two exoskeleton robots based on plantar pressure are studied. The reliability of the proportional method in gait phase detection under normal walking condition is analyzed. The reliability of the proportional method and the two threshold methods reaches 89.16% and 89.46%. It is verified that the proportional method is suitable for gait phase detection, and the problem of real-time data detection is solved.
Key words: exoskeleton robot; plantar pressure; gait phase detection
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外相关技术及研究现状 1
1.3 论文主要研究内容 3
第2章 外骨骼机器人步态相位分析 4
2.1 足底压力数据采集 4
2.2 人体步行运动分析 5
2.3 步态相位划分 7
第3章 阈值法步态相位检测 8
3.1 TAM阈值法 8
3.2 Lopez-Meyer阈值法 8
3.3 阈值法步态相位检测规则 9
3.4 阈值算法软件实现 10
3.4.1 TAM阈值法的设计实现 10
3.4.2 Lopez-Meyer阈值法的设计实现 12
3.4.3 步态相位算法优化 14
3.4.4 阈值法总体系统设计 17
3.5 阈值法步态相位检测结果 18
第4章 比例法步态相位检测 19
4.1 比例法步态相位检测规则 19
4.2 比例法软件设计 22
4.2.1 初始步态相位检测设计 22
4.2.2 双脚步态相位检测设计 23
4.2.3 单脚步态相位检测设计 25
4.2.4 比例法总体系统设计 27
4.3 比例法步态相位检测结果 28
第5章 步态相位检测结果分析 29
5.1比例法和阈值法的可靠性比较 29
5.2 TAM法和Lopez-Meyer法的区别 30
5.3 比例法相比于阈值法的优势 30
第6章 总结与展望 31
参考文献 32
致谢 34
第1章 绪论
1.1 研究背景及意义
中国近几年的经济迅速发展,伴随着世界信息化的浪潮,外骨骼机器人领域也正在中国越来越受重视,如今外骨骼机器人主要用于军事、航空、医疗等领域。在军事领域中,外骨骼机器人主要用于减轻军人行军时的负重负担,减少健康人体在长时间行走时关节的损伤和负载的压力[1]。在航空领域中外骨骼机器人不仅仅能帮助宇航员在失重环境下的运动负担,同时能够实时监测宇航员在失重状态下的身体情况,达到高效工作的目的。但在现实生活中,外骨骼机器人与我们最息息相关的是用于医疗领域中的减重步行训练。这种训练方法是社会中应用比较广泛的腿部康复训练方式之一,这种训练是通过医护人员或者机械助力的方式将患者在步行状态下的重量减轻,达到帮助患者进行正常步行的目的。一般在恢复期间,使用这种方法能够刺激患者的神经网络系统重组,令患者在行走时步态状态和腿部受力状态慢慢趋近于正常[2]。现如今以人工方式进行腿部康复训练耗时而且费力,人工所形成的助力并不容易调整至每个人适应的步行状态上,因此外骨骼机器人就发挥了更加重要的作用,根据不同人体的行走步态特征分析出每个人的步行方式,以便更好的帮助患者进行减重步行练习,从而达到高效率的训练效果。由于以上应用的广泛推广,对外骨骼机器人进行准确的步态检测是实现这些应用的重要基础之一。在未来对于外骨骼机器人的步态检测方法将会越来越多,步态检测对于未来的外骨骼机器人领域也会越来越重要。
而外骨骼机器人的步态检测的应用包括了许多方面,如跌倒检测,步态相位分类,步态行为识别,疾病判别等[3]。其中基于足底压力数据的步态相位分类是进行步态相位检测的基础,因此研究步态相位检测也是现代外骨骼机器人步态检测中的重要一环。
1.2 国内外相关技术及研究现状
步态检测的类型有很多种,能够作为步态检测的信息也非常之多,近几年来发展快速且应用广泛的步态检测方法分为以下几种:
录像检测法。以高速摄像机所拍摄物体或人体的运动方式作为检测信息,将拍摄出的图片通过去燥滤波处理,得出物体或人体的具体运动状态。这种方式不会影响到物体或人体的正常运动,不会出现干扰,但是成本高不易于普及使用。
肌电检测法。以皮肤表面获取的肌电信号为检测信息。人体运动从而影响的肌电信号为标准,做出表面肌电图用以步态检测。但是这种方法缺陷也非常明显,在人体运动时分泌的汗液会严重影响机电信号的准确度,从而产生错误的测量结果。
传感器检测法。以置于人体各个部位的传感器信息为步态检测的依据,将传感器测量出的具体数据通过电脑端进行数模转化,完成信息的采集,利用采集到的传感器信息进行步态检测。这种方法应用最为广泛,但传感器的存在会对人体运动会产生一定影响。
在国外研究中,对于传感器步态检测的研究也有许多,Pappas利用角速度传感器和足底压力传感器测量出的角速度和足底压力信号检测人在运动中的不同时相,提出了一种基于规则的检测算法,且该系统能检测出下蹲起立等非步行运动状态[4]。Hausdorff等人开发了一种用于老年人跌倒检测的系统,用位于脚掌和脚跟的两个力敏电阻器分别连接至电路板,用以检测在步行状态下的时间参数,完成传感器步态检测[5]。
国外对于足底压力数据的测量也有许多成就。Bae等人利用惯性测量单元和集成了足底压力传感器的智能鞋去测量患者的在行走时步态数据,利用网络传输数据的方法对患者进行了实时监控[6]。于2006年,Karkokli利用了8个压阻式传感器设计出了一种鞋垫式足底压力测量装置,装置的创新性在于对测量结果进行实时显示,传感器将测量数据直接输出给数据采集卡,数据采集卡将数据实时分析和处理后以LABVIEW进行实时显示,以便观察测量结果[7]。
国内的步态检测研究工作起步较晚,水平上与国际先进研究尚有差距,但近年来我国步态检测技术发展迅速。就现阶段而言,国内研究步态检测技术可以大体跟上国际研究水平。张潇等人运用三维测力平台对正常人足底受力情况进行了数据采集和分析,发现了不同运动状态下人体的特征参量变化的趋势,可以利用这些参数进行步态检测[8]。2001年之后,中国科学院自动化研究所建立了具有一定规模的CASIA步态数据库,并提出了多种步态检测的算法,收获了较多关于步态检测方面的研究成果[9]。
国内对于足底压力测量技术方面也有研究,韦启航等人研制的基于压力传感器阵列的智能鞋,通过将采集到的足底压力数据与互联网相结合,形成了典型的特征数据库。赵凌燕等人在利用压力鞋垫系统完成步态检测的同时提出了一种新的分析方法,利用步态相位累加法将各个时刻检测出的步态相位以累加的方式完成步态特征的分析和检测,将一个步态周期分成了8种步行状态,实现了基本的步态相位检测系统[10]。王兰美等人设计出了一种可用于测量足底压力分布的压电陶瓷力传感器,这种传感器可以检测出足底压力中三个方向的受力状况,并将这些数据图像化,可以实现更多方面的检测功能[11]。
1.3 论文主要研究内容
本文主要研究的是基于足底压力的外骨骼机器人步态检测方法设计和实现,运用的主要方法是阈值法和比例法,研究的数据为外骨骼机器人行走状态下的左脚掌、左脚跟、右脚掌、右脚跟的地面接触力。通过分析人体行走时的具体步态相位,进行步态相位划分,而后通过阈值法或比例法实现对足底压力数据的二值化或比例化。根据行走时的具体步态规则实现外骨骼机器人的步态检测。本文主要研究的内容安排如下:
第1章 绪论。外骨骼机器人背景的介绍和其应用广泛的领域,并阐述步态检测在外骨骼机器人中研究的地位,说明研究的意义。介绍了国内外典型的外骨骼机器人种类和具体应用的步态分析技术。
第2章 外骨骼机器人步态相位分析。对人体步行运动的具体过程进行分析,通过具体足底压力数据对脚跟脚掌的受力变换进行探讨,做出了具体的步态相位划分,为后面软件和算法的选择做出了依据。
第3章 阈值法步态相位检测。运用阈值法进行步态相位检测。使用TAM阈值算法和Lopez-Meyer阈值算法对足底压力数据二值化,通过已经划分的步态相位对二值化的数据进行分类,利用Matlab软件编程实现阈值法的步态相位检测。
第4章 比例法步态相位检测。使用比例法将足底压力数据比例化,根据比例因子判断出双脚步态相位和单脚步态相位,利用Matlab软件编程实现比例法的步态相位检测。实现实时性步态相位检测基础。
第5章 步态相位检测结果分析。对已有的足底压力数据进行对比分析,对比了两种阈值法的不同之处,并验证了比例法在外骨骼机器人正常行走时可靠性。
第6章 总结。对本次设计中外骨骼机器人步态相位检测功能、技术指标进行了总结,然后对仍存在的不足进行分析,对未来外骨骼机器人步态相位检测的发展做出展望。
第2章 外骨骼机器人步态相位分析
2.1 足底压力数据采集
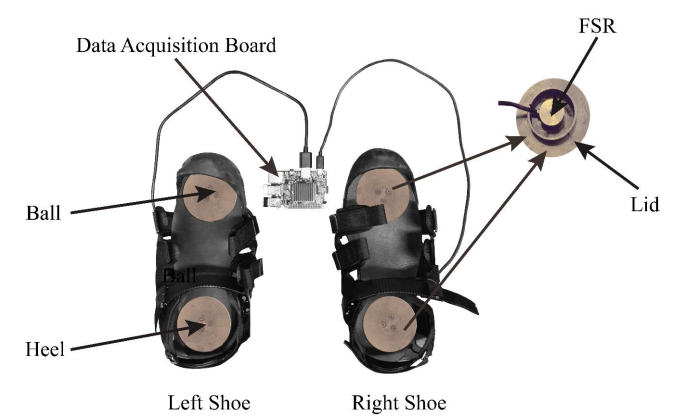 由于本次研究没有进行数据采集工作,所有数据均由导师提供,因此选用导师之前的文章中所提出的采集数据方法进行简单介绍。基于外骨骼机器人脚底的足底压力数据通过两套力传感记录单元来记录,两个传感单元分别嵌入每只鞋的球和鞋跟的鞋垫中。这样通过脚跟与脚掌受力的变换从而检测出当时的地面接触力,从而实现了足底压力数据的收集工作。
由于本次研究没有进行数据采集工作,所有数据均由导师提供,因此选用导师之前的文章中所提出的采集数据方法进行简单介绍。基于外骨骼机器人脚底的足底压力数据通过两套力传感记录单元来记录,两个传感单元分别嵌入每只鞋的球和鞋跟的鞋垫中。这样通过脚跟与脚掌受力的变换从而检测出当时的地面接触力,从而实现了足底压力数据的收集工作。
图2.1 足底压力测量系统
但由于所用数据均为导师所提供,因此也无法进行实时数据的获取,只能通过如今已有的足底压力数据进行具体分析,所有收集的数据采样频率均为167HZ。
2.2 人体步行运动分析
步行是人体最基本的运动方式,人们在孩童时代就被教会了行走,但是却不会去具体的分析行走时人体的具体运动情况,这种无意识的运动行为包含了许多的人体对器官的控制。而分析人体步行的运动状态有助于进行更好的步态相位划分,有助于提高外骨骼机器人步态检测的准确率。

图2.2 人体步态行走分解图
本次研究的是基于足底压力数据的外骨骼机器人步态检测,所以先以足跟足掌的受力变化为核心来研究人体行走的具体步态。
以右脚着地为步态周期的起点,初始步态状态可以看成是双脚着地状态,左脚掌刚准备离开地面,而右脚则是处于脚跟着地状态。左脚准备离地,其地面接触力逐渐减小至零,而右脚从右脚跟刚着地的状态转向平坦受力姿态,这是人体行走的起步阶段。左脚完全离地处于摆动阶段,右脚则处于平坦支撑期用以支撑整个身体的重量,这是人体步行阶段的左腿摆动期。紧接着左脚跟慢慢着地,左脚跟的地面接触力慢慢增大并向平坦姿势转变,同时右脚从平坦姿势转到起步姿势,此时右脚跟地面接触力减小。右脚掌逐渐离地直到右脚完全处于摆动状态,此时左腿完全支撑起人体的重量,到右脚跟着地,同时左脚跟的地面接触力减小,向起步状态转变。自此完成了一整个步态周期。如此反复循环完成了人体步行运动的基础。
仅从足底压力的角度分析,在一个完整的步态周期中,步态相位可以分成两大类,一类是单脚支撑阶段也称之为单脚摆动阶段,一类是双脚支撑阶段。从右脚刚着地为步态周期的起点,步态初始阶段是双脚支撑阶段,而后转至左脚摆动阶段,完成摆动后又进入双脚支撑阶段,此时与初始的双脚支撑阶段受力相反,在从双脚支撑转换到右脚摆动,待摆动结束后进入右脚跟刚着地的双脚支撑阶段,完成一整个步态周期。
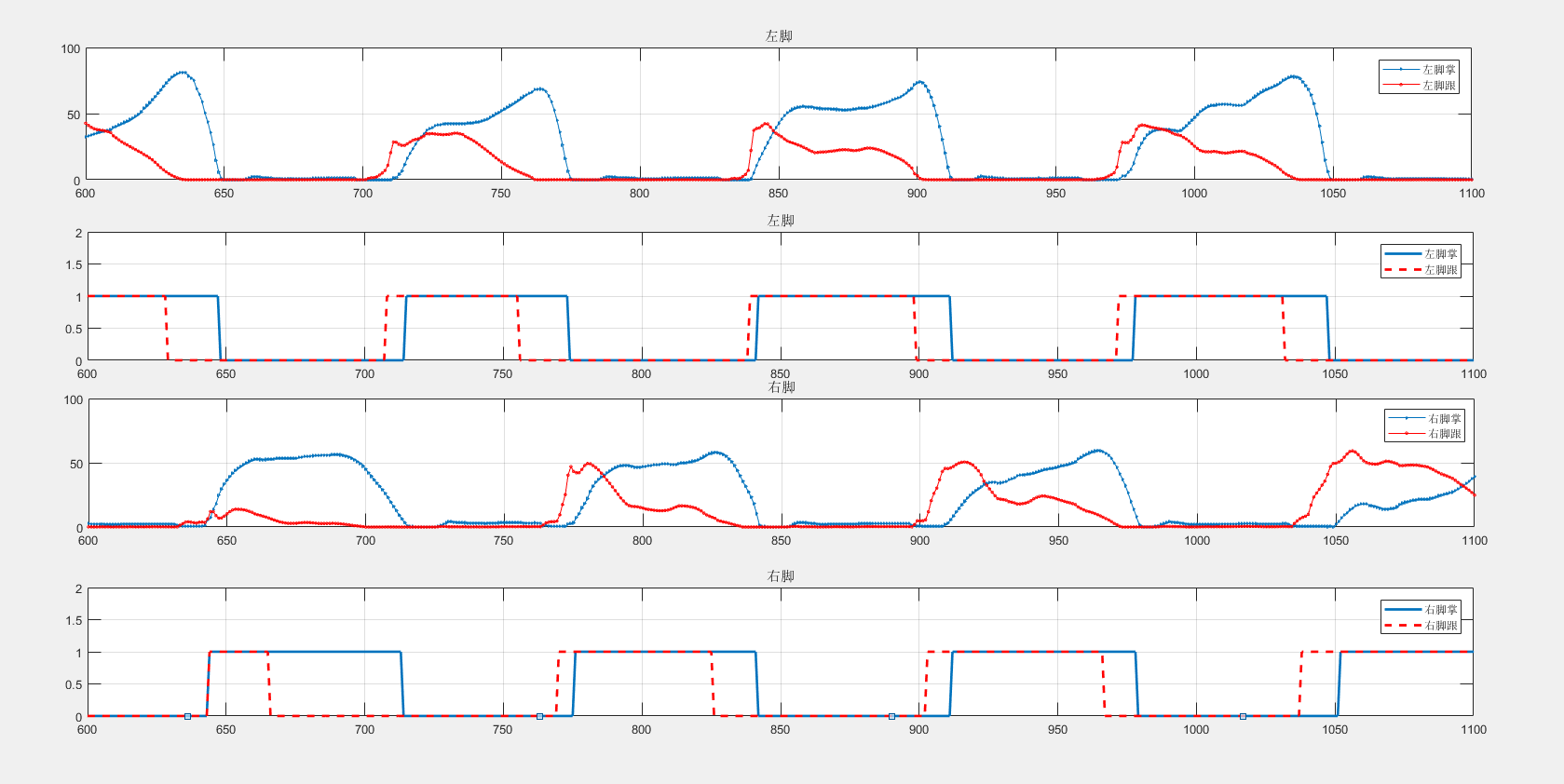
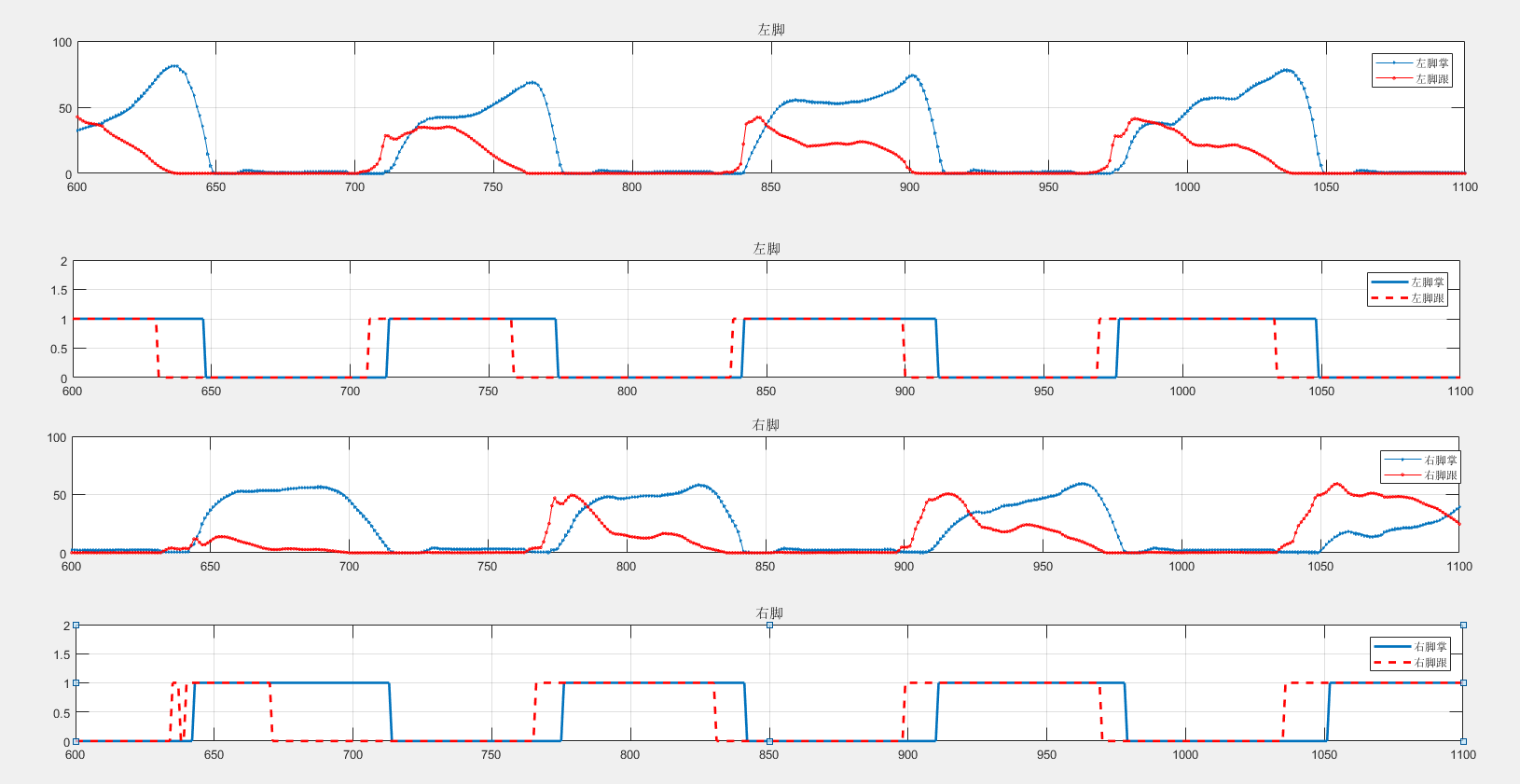
通过老师所给的实验数据,将4组足底压力数据图像化,分析实际外骨骼机器人行走时足底压力的具体变化。
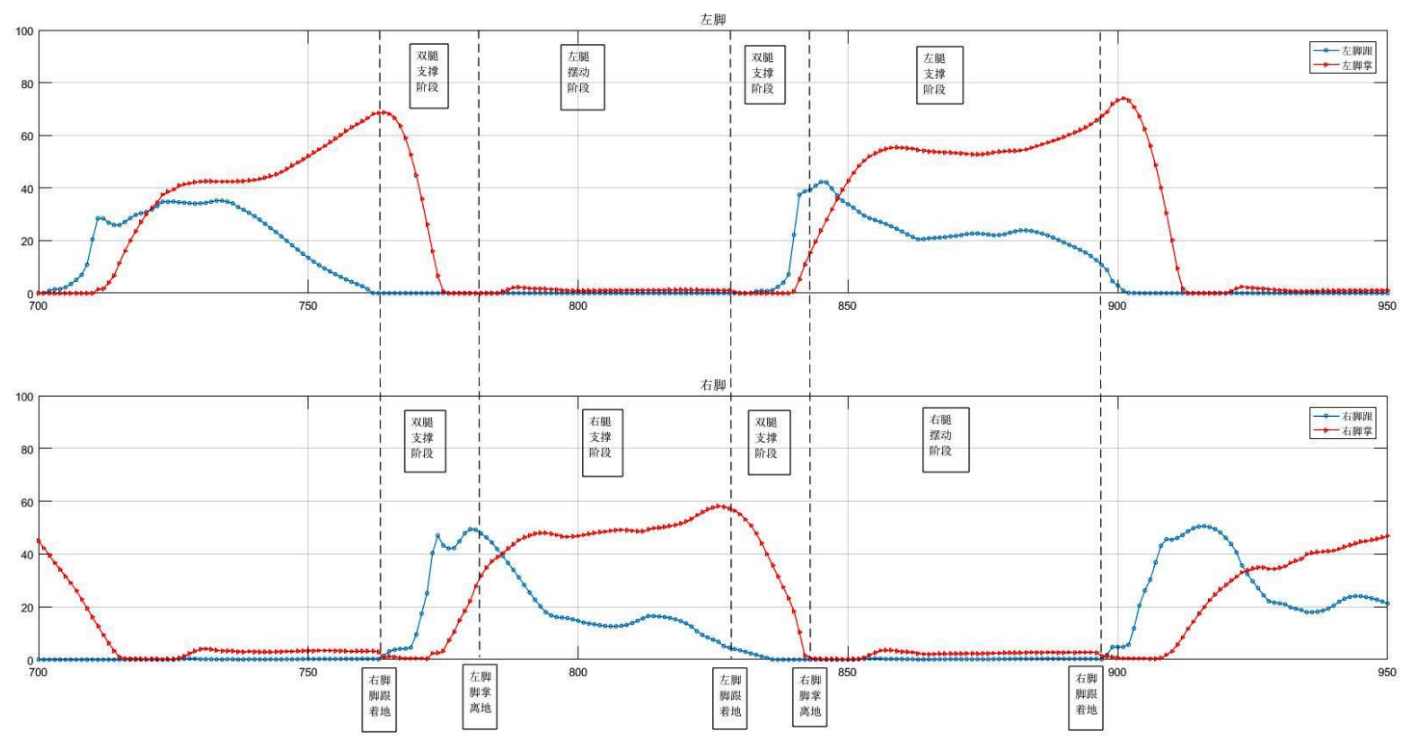
图2.3 足底压力数据中一个完整的步态周期
图2.3中以右脚刚着地为起点,即第一个竖线所表示的阶段,此时右脚跟刚着地,左脚掌支撑了人的大部分重量。而后进入双脚支撑阶段。此时右脚脚跟脚掌数据地面接触力增大,左脚脚掌与脚跟受力减小。至第二个竖线时进入左脚摆动阶段。此时左脚数据几乎为零,右脚数据中脚跟相比脚掌先减小,代表右脚脚跟慢慢离地,整个身体重心转移到右脚脚掌,直到左脚接触地面,到达双腿支撑阶段。此阶段与上个双脚支撑阶段类似,但是左右脚数据变换相反,左脚数据中两组数据逐渐增大,右脚数据逐渐减小至零。而后转换成右脚摆动阶段,直到摆动阶段结束右脚跟着地,完成一个完整的步态周期。
从足底压力数据中可以清楚的看出。人体在步行时足底压力呈现周期式的变换。而双脚支撑阶段和单脚摆动阶段的数据特点可以清楚看出可以使用阈值法来区分脚跟脚掌着地的状态,达到检测步态相位的目的。同时也可以使用单个足底压力数据占总体的百分比如右脚整体受力占整体受力的比例和脚跟或脚掌占整只脚的比例来判断出处于哪一种步态阶段。
2.3 步态相位划分
根据上面人体具体行走状态可以将步态相位划分为两大类,第一类是一只脚离地另一只脚着地的状态,将这种状态称为单脚摆动状态。第二类则是双脚同时着地的状态,称之为双脚支撑状态。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: