基于uArm Swift机械臂激光雕刻技术研究毕业论文
2020-02-17 23:23:04
摘 要
人工智能时代的到来,机器人将越来越多应用于生产生活中。本设计基于uArm Swift机械臂进行激光雕刻任意汉字的研究。设计项目具有方便、快捷、应用场景广、智能化控制等特点。在设计中,硬件平台选择UFACTORY公司的4自由度uArm Swift机械臂产品,并配备了雕刻的激光头。对硬件平台的结构功能进行了深入分析,建立了机械臂运动学模型求解正逆运动学。软件设计部分采用Python作为编程语言,PyCharm软件作为程序开发环境。分模块进行编程,完成了对汉字笔画的获取和处理、Turtle绘图模块模拟绘制汉字、激光头初始位置的获取处理、激光开关的控制等,然后综合完成总程序的编写。接着搭建了实验平台,实际测试汉字雕刻的最终效果,对雕刻出来的字体效果进行评估比较,对其存在的问题和取得的成果进行总结,最后完成了整个项目的设计目标,并提出了一些未来的展望。
关键词:机械臂;激光雕刻;智能控制
Abstract
With the advent of the era of artificial intelligence, robots will be more and more used in production and life. This design is based on uArm Swift manipulator for laser carving of arbitrary Chinese characters. The design project has the characteristics of convenience, rapidity, wide application scenario and intelligent control. In the design, UFACTORY's 4-DOF uArm Swift manipulator is selected as the hardware platform and equipped with a carved laser head. The structure and function of the hardware platform are analyzed in depth, and the kinematics model of the manipulator is established to solve the forward and backward motion. In the software design part, Python is used as the programming language and PyCharm is used as the programming environment. The acquisition and processing of Chinese character strokes, the analog drawing of Chinese characters by turtle drawing module, the acquisition and processing of the initial position of laser head, and the control of laser switch are accomplished by programming in modules, and then the overall program is compiled. Then, an experimental platform is built to test the final effect of Chinese character carving, evaluate and compare the effect of the carved fonts, summarize the existing problems and achievements, and finally complete the design objectives of the whole project, and put forward some future prospects.
Key Words:Robotic Arm; Laser Engraving; Intelligent Control
目 录
第1章 绪论 1
1.1 研究背景和意义 1
1.2 国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 研究内容和章节安排 4
1.4 本章小结 4
第2章 总体方案论证 5
2.1 硬件平台选择 5
2.2 软件平台选定 6
2.3 本章小结 7
第3章 机械臂控制模型 8
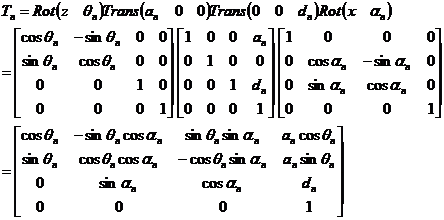
3.1 建模数学理论基础 8
3.1.1 位姿和坐标系描述 8
3.1.2 平移和旋转坐标变换 9
3.2 机械臂运动学 12
3.2.1 D-H参数法 13
3.2.2 正运动学分析 14
3.2.3 逆运动学分析 16
3.3 机械臂速度和静力控制 19
3.3.1 雅可比矩阵 19
3.3.2 速度的分析 20
3.3.3 静力的分析 21
3.4 本章小结 22
第4章 软件设计 23
4.1 总体设计思路流程 23
4.2 Python语言及对应库 23
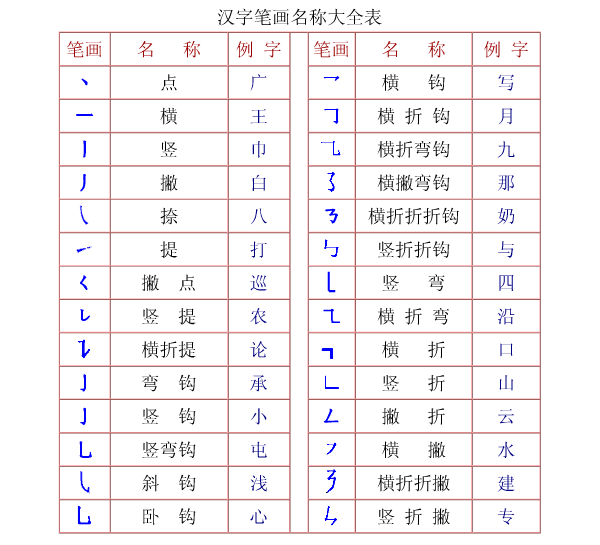
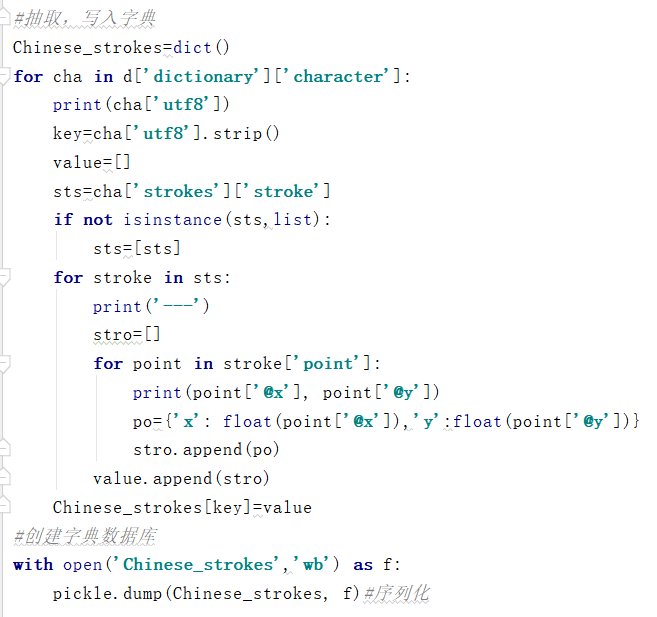
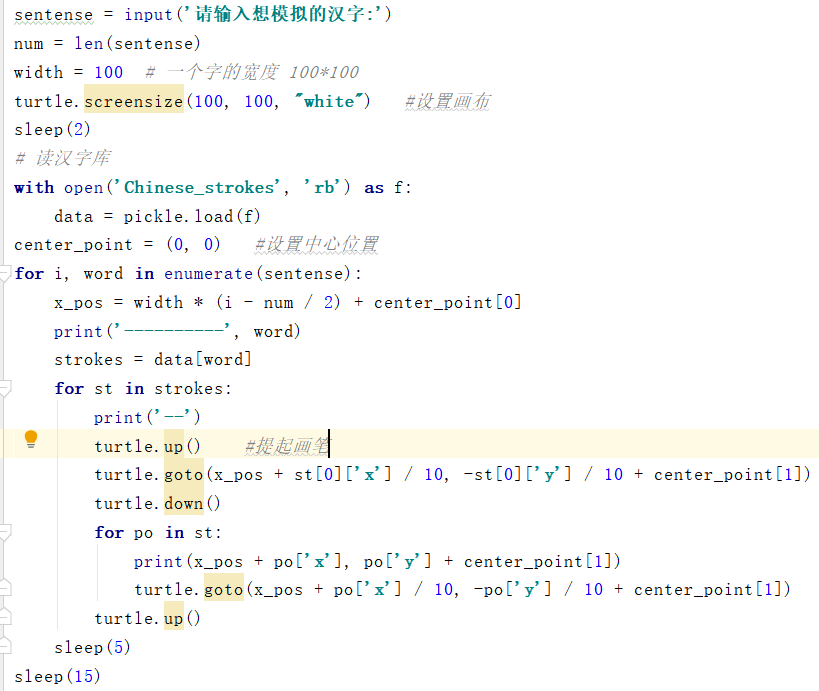
4.3 汉字笔画获取和转化 24
4.3.1 汉字笔画的获取 24
4.3.2 汉字库信息的处理 24
4.4 绘图写字模拟 25
4.4.1 Turtle模块的介绍 25
4.4.2 汉字的绘制 26
4.5 激光雕刻编程 27
4.5.1 总程序流程 27
4.5.2 关键代码编写 28
4.6 本章小结 29
第5章 实验平台搭建及效果测试 30
5.1 实验平台组成 30
5.2 软件硬件之间通信 30
5.3 程序运行结果分析 31
5.4 本章小结 32
第6章 总结和展望 33
6.1 项目总结 33
6.2 研究展望 33
参考文献 34
致 谢 35
第1章 绪论
1.1 研究背景和意义
随着经济社会和科学技术的发展进步,机械化在很多场景代替了枯燥单一的人类劳动,而机械臂利用其仿人手臂和可智能编程化的优点,在更多的场合可以完成以前需要人才能完成的工作!甚至在一些领域,机械臂有着比人类更好的表现能力,例如一些精密和危险的工作。现如今,机械臂已经应用于许多领域,医学、军事、工业,甚至民用娱乐都有。而在工业生产应用最为广泛。我国作为一个制造业大国,随着人口老龄化出现人口福利的减少,对于劳动力需求较大的制造业,机械化、自动化必将是代替传统劳动力的途径。这对于产业结构转型优化、经济由高速度转向高质量增长、提高效率和质量都有极大帮助。据有关报道显示:从2014年到2018年,全球销售用于工业生产的机器人达到四十万台[6]。这些机器人大都用在零件的生产、设备的装配、金属的焊接、食品的加工相关行业。机械臂可分为3轴、4轴、5轴、6轴甚至更多轴。每个轴能自带有动力系统转动,即为几个自由度,一般自由度越高,机械臂的结构就越复杂,编程控制也越复杂,能完成的动作操作也就越广。通常,在工业领域使用的是6轴(6个自由度)的机械臂,如下图1.1(a)。除了工业领域,近年来,一些小巧机械臂开始进入生活领域,比如用于教育儿童写字画画的机械手、用于帮助老人行动的机器人和人工智能时代发展的各种智能家具等。这种机器人凭借着其价格可大众化接受、小巧可智能编程控制的优点,是进入家庭的好产品。本次用到的就是一款小巧轻便机械臂可以通过编程控制完成许多功能。如下图1.1(b)。


(a)工业机械臂 (b)小巧机械臂
图1.1 常见机械臂
机械臂用于雕刻是其中一个常见的使用场景。传统的雕刻是人使用利器在石头、木板、竹片上雕刻图案或文字。使用机械臂和刀片同样可完成这些动作。但是本设计使用的是激光雕刻。在机械臂的末端执行器上装上一个激光头,通过编程控制机械臂的移动和激光束的开关,就可以雕刻出所需要的图案和文字。这个过程一般是:机械臂按照原先设定好的
路径规划行动,末端执行器上的激光头发出激光束,激光束聚焦在雕刻器件上,由于激光具有极大的能量,照射一会便产生很大热能,促使加工物品发热燃烧,相应的被照射部分熔化蒸发气化,留下雕刻的线条细纹,达到雕刻的目的。因为激光雕刻过程中,加工器件和被加工物体之间是不接触的,所以不会对工件产生作用力而损坏它,也不用特殊的固定。激光束可以调整得非常细小,所以雕刻出来线条可以做到很细,可达到微米级别[16],对于要求高精密、细线条的雕刻,激光雕刻无疑是最好的选择!下图1.2是常见的激光雕刻铭牌样图。

图1.2 激光雕刻图
可见机械臂无论是生产制造还是生活上都有着广泛的应用,生产车间可用机械臂控制激光束进行切割、焊接、雕刻;小巧的机械臂可以进入家庭,作为学前儿童的启蒙玩具,作为老人协助运动的好帮手,也是学生了解机械原理、学习机械控制编程的良好载体!相信随着人工智能时代的到来,人们对智能产品越来越多的需求,机器人在不久的将来会进入大众百姓家庭,解放我们的双手,为我们带来许多方便和娱乐。
1.2 国内外研究现状
本小节讲述机械臂和激光雕刻当前国内外的发展现状,对当前比较热门的相关研究进行分析,总结他们的优点和不足。
1.2.1 国外研究现状
目前,日本机器人应用于食品、药品、化妆品行业有较快发展,服务型机器人逐渐增加。美国是工业机器人第三大市场,其更多的企业注重研发,对机器人主体制造较少,其申请相关专利达到1.6万多件。除了一般的工业生产,高智能的机器人在国防、太空中有广大的应用。韩国和德国机器人产品则集中在汽车电子领域,汽车产业是机器人的主要推动力。目前,在全球范围内,亚洲是使用机器人最多的地方,占到总数一半以上,而中、日、韩、泰又占了亚洲的75%以上。可以预见,未来亚洲仍然是机器人的主要市场。
Fei Chao、Fuhai Chen[3]等人研究了机械臂书写的方法,通过人机交互让机器人学习人的写字动作,然后重复人的动作用毛笔在画布上写字;Gang Yao、Zuyuan Zhu[4]等人设计了一种用于识别人体手势的分类器,通过使用运动感测输入装置,识别实验者每一个动作代表的手势笔画坐标,控制机器人写字;Marius和Lucian[5]研究了用于教育证书刻写的方法,仿照压花邮票式的做法,设计出用于教育的机器人,该项目具有安全且固定性,能每次固定字体形状,防止盗版伪造;Mortinov和Aleksandr[18]设计制造出一种用于激光雕刻机的特殊数控系统,他们首先分析了激光点状雕刻机的工艺参数和激光冲床的控制问题,针对传统的脉冲等待方法导致性能损失和机器功能的不完全使用问题,提出了一种新方法大大提高了处理效率,性能提升接近50%。Palmer[19]研究了连续臂机器人在上线圈和解线圈过程中的控制算法,该设计可以应用在危险环境中对机器设备的检查修复。
可见国外对机器人运行学研究的方面很广阔,不仅有对书写雕刻字体的方法探求,而且对机器人危险作业、数控系统性能提升方向做出了许多研究,在整个机器人自动控制领域,国外发展的早,进过几十年的发展,技术较为领先。
1.2.2 国内研究现状
国内机器人起步较晚,大致改革开放后重点发展。我国第一台工业机器人在上世纪八十年代研制成功,后来哈工大又研究出第一台弧焊机器人。国家863计划将智能机器人作为一个发展主题,使得机器人产品快速发展。2016年李克强总理提出“中国制造2025”计划,使得中国的机器人自动化产业进一步发展壮大。
国内的高校和研究机构作出了许多相关的研究,如北京工业大学的王俊杰[1]做了基于Arduino的机器人视觉识别字符轮廓特征,通过图像识别算法获取字符的图像位置坐标信息,然后提取灰度值处理重新绘制字符信息出来可学前儿童教育识字,该研究还解决了传统的图像处理过分依赖于图像预处理结果,该数字识别字符只依赖于控制器上的写字程序,这降低了机器人的硬件要求,使得成本得以控制,生产价格低廉的机器人用于学前教育;华侨大学的邹宇林、黄吉祥、邵辉[2]针对传统的数控雕刻机床速度慢、灵活性低、加速度规划不足的问题,重新建立了笛卡尔空间,对轨迹运动的加减速优化,使用正弦加减速的启停和不连续曲线段五次多项式的平滑过渡,减小规划量同时进行柔性加工,后面通过了Simulink的三维仿真;李沛谞、刘进山、张文涛[7]三人设计了基于单片机的小型激光雕刻机,使用Atmel公司的328系列芯片实现,其最小开发系统板基于Arduino平台,使用C 语言开发生成G代码驱动步进电机完成激光雕刻,该设计具有小型、电压和功率小的优点;钟春敏和华文林[11]对双臂雕刻机器人建立了其雅可比矩阵,对它们进行协调工作做了运动学分析求解,这对研究多机器人协调工作作出的探索;任秉银、魏坤、吴卓琦[13]三人做了视觉伺服路径规划研究,分析动态非结构环境下机器人自主作业的难点以及伺服路径规划存在的两种约束作出处理,提升了收敛性和稳定性;张永善[20]研究了用于石材加工雕刻的机器人,最终完成5个自由度,结构形式为1P4R的石材立体工艺制品雕刻机器人主体和末端刀片设计,并结合STL文件进行了模型仿真,该机器人运用于石材行业可大大改善工人的作业环境!
机器人运动学路径规划和它的许多应用如写字画画、雕刻、工厂作业等在国内都有大量的研究,虽然起步较晚,但近年来发展迅速,相信未来机器人学会更多运用于人工智能的产品,便利日常的生产生活。
1.3 研究内容和章节安排
本设计基于UFACTORY公司的uArm Swift机械臂硬件平台,结合Python语言编程,控制该机械臂末端执行器激光头的动作,以达到雕刻汉字的功能。本文章节安排如下:
第1章:绪论部分,对机器人和激光雕刻的发展背景、研究意义、国内国外的研究成果现状和市场简要介绍,并串通本设计的结构内容;
第2章:总体方案论证,包括硬件平台选定和参数介绍、软件编程语言的选择和大体思路;
第3章:机械臂结构与控制模型,先说明模型的数学基础理论,进而分析机械臂运动学,包括D-H参数法、正逆运动分析、速度和静力的控制;
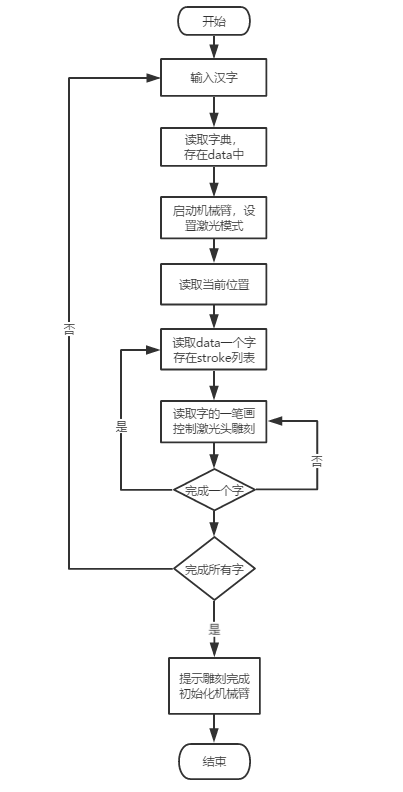
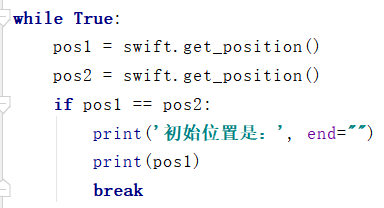
第4章:机械臂激光雕刻软件设计,首先是总体思路介绍,然后是用到的Python库说明,接着是各模块编程要点讲解,包括汉字库的处理、机械臂初始位置确定、雕刻高度、字体大小选择等;
第5章:讲述实验平台的搭建和测试,包括软件硬件之间通信,实际雕刻出不同的汉字,对其质量进行分析评估改进;
第6章:总结与展望,总结本设计前面进行的工作,分析其中的优点和不足,同时展望下一步有待研究的方向和其中的难点。
1.4 本章小结
本章绪论部分简述了机器人激光雕刻的研究背景和国内国外发展现状,包括市场了解和国内存在的不足,未来的发展方向。还对每一章节的内容结构安排进行了说明,让整篇文章的开头明了,后面将按此主线进行每一点细致说明。
总体方案论证
本章对设计总体的方案进行选择,包括对硬件平台和软件平台的选择,针对可供选择的几种方案,比较他们的优缺点,选定最佳方案。
2.1 硬件平台选择
激光雕刻可使用专门的激光雕刻机,拥有着智能化的控制,但是其体积比较庞大、价格也不够大众化,一般是专门从事激光雕刻产品的商家才会使用。作为学生的一个研究,更趋向于接受小型、可编程控制、价格较低的机械臂接上激光头来控制雕刻。所以本设计使用uArm Swift这款机械臂做为硬件平台进行激光雕刻研究。下面图2.1是它的硬件结构图。
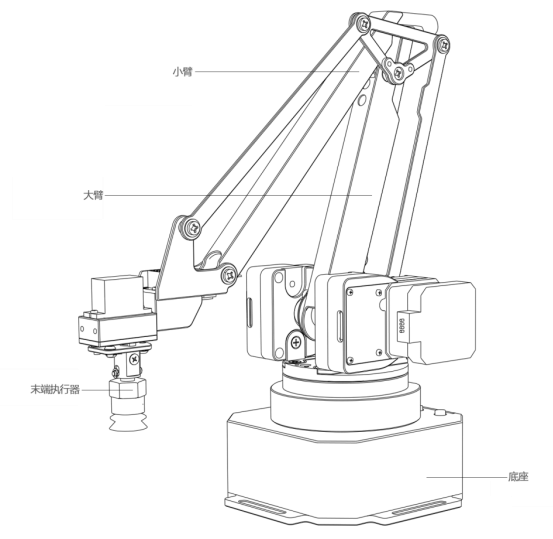
图2.1 uArm Swift机械臂硬件结构图
表2.1是它的一些主要参数指标。
表2.1 uArm机械臂主要参数表
参数名称 | 对应值 | 参数名称 | 对应值 |
重量 | 2.2kg | 电机型号 | 定制变速箱 步进电机 |
自由度 | 4 | 主板型号 | Arduino MEGA 2560 |
最大精度 | 0.2mm | 位置反馈 | 12bit编码 |
最大载荷 | 500g | 开发平台 | Python/Arduino/ROS |
最大速度 | 100mm/s | 激光功率 | 500mW |
工作范围 | 50-320mm | 激光波长 | 405nm |
uArm Swift 机械臂是UFACTORY公司的核心产品之一,是一款小巧的桌面级机械臂,它使用Arduino MEGA 2560作为主板,该产品灵感来源于ABB码垛机械人IRB460。它由三个步进电机组成,拥有4个自由度,采用12bit高精度绝对磁编码器,具有0.2mm的重复定位精度,是目前重复定位精度最高的桌面级机器人之一。此外,该机械臂是开源的,具有多种开发环境可选择,可使用Python、Arduino、ROS进行编程控制。末端执行器有吸盘、通用支架、电动夹子、激光头、3D打印头,众多的末端可选择,使该款机械臂能完成许多不同的诉求。加之小巧桌面级产品,是一款教育学习使用的好产品!本设计激光雕刻使用的是激光头套件。
2.2 软件平台选定
uArm Swift机械臂本身配备有一款简单的交互操作软件uArm Studio,使用这个软件可以对机械臂进行简单的运动控制。软件功能包括使用Blockly进行简单图形化编程、实时控制机械臂运动(高度和角度)、手持示教、画图、激光雕刻等。这款软件有许多已经封装好的例子可供开始接触时学习了解机械臂运动控制规律。而对于实际的设计开发则不采用这个。开发时可供使用的软件开发平台有Python、Arduino、ROS。Arduino主要是用GCode指令代码控制,指令繁琐复杂,不好理解记忆;ROS是一个专门为机器人开发设计的编程平台,但语法较复杂,学习起来耗时长;而Python作为常见的一个高级编程语言,学习起来简单易懂,而且存在大量库模块可调用,开发耗时短,效率高。
Python现在更新到3.7版本,其创始人是吉多。Python2和Python3没有完全兼容。版本的优化使得Python语言风格更清晰易懂,编程效率高。现在已经应用于大型项目的开发。特别是在人工智能、机器学习方面用的使用更加广泛。Python不像其他语言一样,往往一个问题有多种语法结构解决,它只设定了一种最佳的方法。这对初学者来说更加易懂可接受。Python是一个编译性语言,所以像java一样可跨平台使用,这又增加了软件设计者的热爱。此外由于代码开源性,很多设计者共同开发,使得它拥有种类齐全的各种库模块,调用这些库模块往往有事半功倍的效果,大大提升了开发效率!正是这些优点和广泛的使用场景,近些年来,Python程序越来越火,甚至超过java成为年度最受欢迎的高级编程语言。在数据库、网络编程、数学处理、多媒体等方面都有着广泛的用途。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: