10吨起重机行走机构电气控制系统设计毕业论文
2020-02-18 11:42:19
摘 要
门座起重机在当今工业生产过程中有着举足轻重的作用,是搬运物体,提升自动化工作效率的必要设备。门座起重机和我国国民经济建设,机械化工程普及方面有着息息相关的作用。在港口等地区,大型设施的施工和主要器件的搬运工作都要用到门座起重机。
因此对门座起重机的电气控制设计方面进行研究,由于门座起重机内部结构多样化,所以设计的主要内容在于门座起重机的行走机构方面。通过这样的过程,结合专业知识和查到的数据,引导并加深我对门座起重机工作实质的认识,是对收集数据和利用知识的整体考验。
本文使用了可编程的控制器PLC技术和变频调速控制方式对10吨重的门座起重机的行走机构的电气控制系统进行了设计,完成必要的PLC梯形图程序和仿真,并且通过基本的收集数据和计算完成对10吨重的门座起重机行走机构的电动机,减速器,制动器等装置的选型。
关键词;门座起重机;行走机构;可编程控制器PLC;器件选型
Abstract
Portal crane plays an important role in today's industrial production process. It is the necessary equipment to carry objects and improve the efficiency of automation. Portal crane is closely related to our national economic construction and the popularization of mechanized engineering. In ports and other areas, portal cranes are used for the construction of large facilities and the handling of major components.
Therefore, the electrical control design of portal crane is studied. Because the internal structure of portal crane is diversified, the main content of the design is the walking mechanism of portal crane. Through this process, combined with professional knowledge and the data found, guide and deepen my understanding of the essence of portal crane work, is the overall test of collecting data and using knowledge.
This paper uses programmable controller PLC technology and variable frequency speed control mode to design the electrical control system of the traveling mechanism of 10 ton portal crane, completes the necessary PLC ladder diagram program and simulation, and completes the selection of motor, reducer, brake and other devices of the traveling mechanism of 10 ton portal crane through basic data collection and calculation.
Key words; portal crane; walking mechanism; programmable controller PLC; device selection
目录
第1章 绪论…………………………………………………………………….……1
1.1门座起重机简介……………………………………………………………1
1.2门座起重机技术参数………………………………………………………2
1.3门座起重机的行走机构……………………………………………………2
1.4门座起重机的电气工作内容………………………………………………3
第2章 调速方案与行走机构设备选型…………………………………………….4
2.1调速方案……………………………………………………………………4
2.2电动机选型…………………………………………………………………4
2.3减速器选型…………………………………………………………………8
2.4制动器选型…………………………………………………………………9
2.5变频器选型………………………………………………………………...10
第3章电气控制设计………………………………………………………...………12
3.1门座起重机行走机构电气控制部分…………………………………...…12
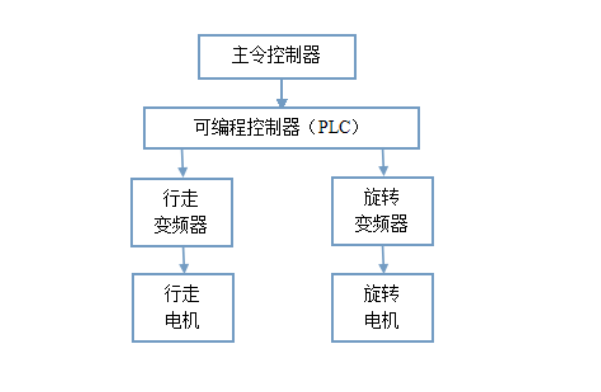
3.1.1调速结构框图…………………………………………..……….……12
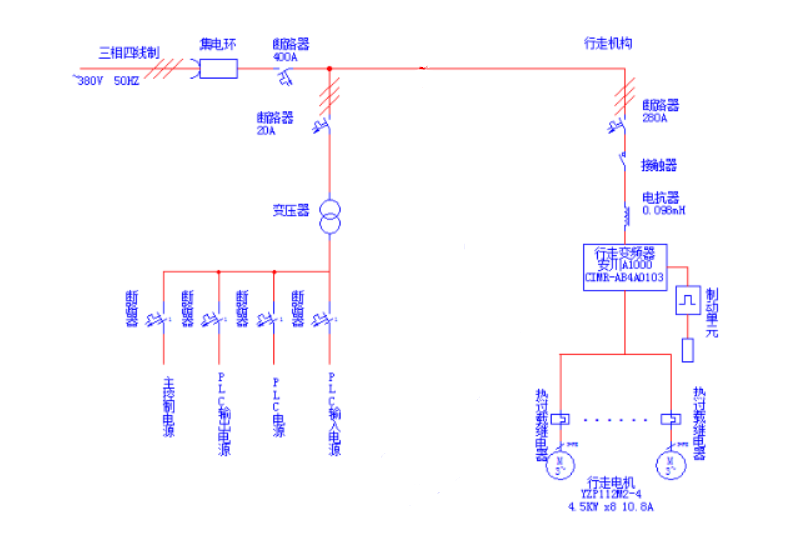
3.1.2变频器外部原理图……………………………………………..….…13
3.1.3变频器接内部线图……………………………………….……….….14
3.2可编程控制器PLC…………………………………………………………14
3.2.1可编程控制器(PLC)简介………………………………………….…14
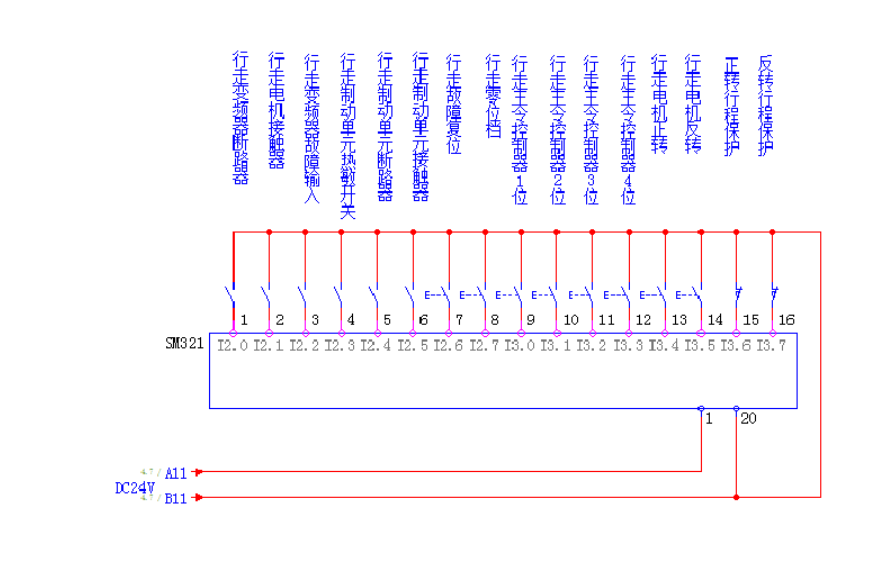
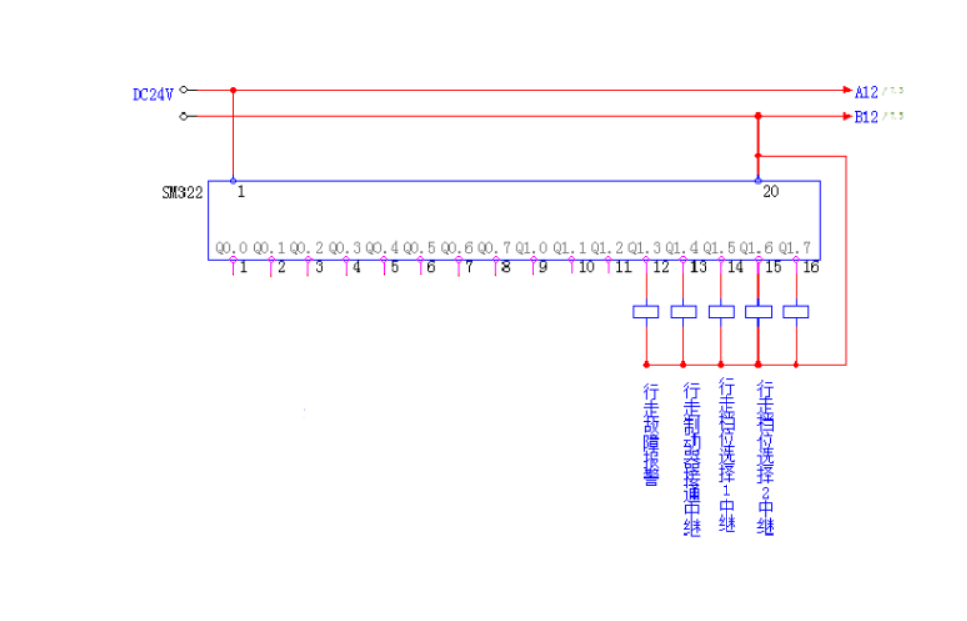
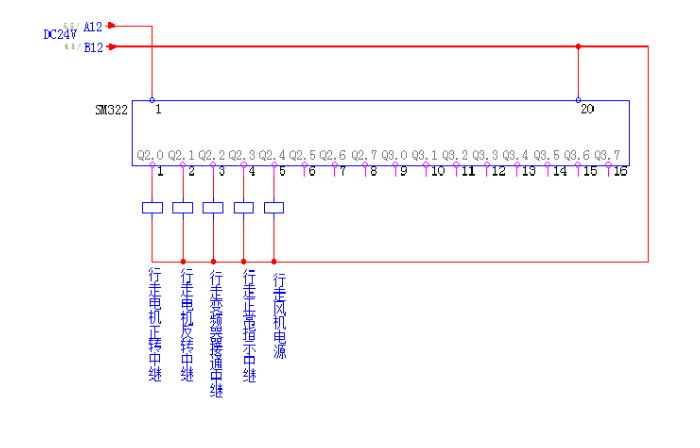
3.2.2 PLC线路图………………………………………………….…...……17
3.2.3 PLC输出对应关系……………………………………………………19
第4章 程序与仿真…………………………………………………………………21
4.1仿真软件使用………………………………………………..…………….21
4.2门座起重机行走机构的PLC程序…………………………………………21
4.3仿真分析………………………………………………………………..….25
设计总结……………………………………………………………………….…….29
第1章 绪论
1.1门座起重机简介
起重机是一种对物体能完成竖直方向上下和水平搬运的工业设备,在工业生产和搬运工作中起重机起到主要作用,完成了人力难以达到的工作效果,减少了工业施工的时间,降低了工作强度和经费,是当今生产生活的中坚力量。
门座起重机在港口等地区使用较多,通常被称为‘门吊’,其特点内部机构多,设备复杂,是是用来运,放物体的机械设备,和我们的生产生活内容有密切关系。在码头等处,门座起重机由于其性能和良好的适配性,通用性,所以算得上是使用最多的起重机设备。
门座起重机工作机构分成4个部分,分别是起升结构,变幅结构,旋转机构,行走机构。本论文涉及的内容便是其行走机构。从外体上看。门座起重机的大体构造可以看作2个部分,分别可以用于旋转和行走,上部分包含了起升结构,变幅结构,旋转机构3大机构,可以进行全方位的旋转,下半部分仅仅包含行走机构和门架。
门座起重机目前可以说是码头,港口使用最多的起重机,随着我国生产技术的提高,已经成为了码头,港口的主要力量。

图1-1 门座起重机
门座起重机的工作主要依靠4个的前3个完成,即起升机构,旋转机构和变幅机构。行走机构将起重机移动调整至工作合适位置,起升机构控制钩下降于物体接触,进而完成上升制动,控制臂架的水平移动幅度,进行旋转运动至结束处竖直上方,起身机构满载下降钩与物体,释放钩。空钩移动至起点上方处后即算完成一次周期循环。
门座起重机的工作内容是循环性质的,包含正反旋转与上下空满载的运动,当然实际的工作旋转角度与上升功率随实际而变化。
1.2门座起重机技术参数
门座起重机的技术参数主要反映的是该设备工作能力的标准,在选择的过程中起重机有十分主要的参考价值,该指标包含的内容有许多,例如最大起重重量,起身的速度与最高高度,起重机自身的重量,最大水平位移速度等。
最大起重重量是指该门座起重机竖直反向能搬运的最大重量,除了需要搬运的物体外还包括门座起重机自身的吊钩重量。额定的起重重量往往用Q来表示。
工作幅度是在额定Q情况下,门座起重机中心轴承与吊索内部中心的距离长度,也常常被叫作工作半径,该指标反应了门座起重机不进行移动时刻工作涉及的距离大小。
起重力矩是Q额定起重量和R工作半径的乘积,往往用M来表示,M的大小直接关系到该门座起重机整体性能强度。
起身高度是门座起重机的吊索内部中心到水平面的高度差,往往用H表示,该指标包括向上的最高高度与下放的最深深度。
门座起重机的工作速度有许多方面,涉及到4个工作机构的速度,起身速度是吊索中心位移的速度,变幅速度是指R工作半径的变化速度,旋转方面是单位时间内门座起重机空载旋转的速度。运行速度是行走机构工作时刻门座起重机水平方向单位时间运行的速度。
1.3门座起重机的行走机构
在门座起重机生产过程中,由于需求需要进行移动时。就需要用到门座起重机的行走机构,其在门座起重机的下半部分,可以用于改变工作的位置,从而扩大门座起重机的生产工作范围大小。在码头,港口工作的门座起重机大多是在预先完成的轨道上进行移动,当然也有无轨道的门座起重机。
门座起重机的行走机构是用其驱动结构来进行驱动,不同的门座起重机驱动机构不同,行走的速度不同,为了安全,大多采用缓慢的行走方式,。门座起重机的行走轮往往是由不同的驱动机构来控制,其控制的主要器件包括电动机,制动器,减速器等。
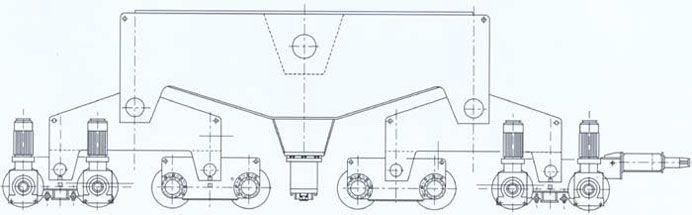
图1-2 门座起重机的行走机构
1.4门座起重机电气工作内容
在现代工作设施中,4大机构起升机构,变幅机构,回转机构和行走机构都会运用到电气控制来进行调速操控,需要用到PLC技术来进行操控和对门座起重机进行实时监控。例如在安全保护方面,电气控制系统的限制开关就需要PLC的控制,PLC对其有限制装置和几重联合锁。另外,在起重机的行走机构内为了安全起见也会设置有紧急的刹车系统,由PLC进行监控,当装置速度异常可能导致故障时刻,其能使工作停止,防止设备装置的破坏与事故的发生。
第二章 调速方案与行走机构设备选型
2.1 调速方案
实际生活中,门座起重机为了满足实际生产要求,往往要进行频繁的速度变换,简单的机械调速通常难以达到所需,而如果选择直流调速,可能会面临经费过高,电动机内部设施复杂等问题。目前较为常用的还是交流变频调速方式。
交流变频调速的调节范围大,在较为低速度时仍然有较高的效率,如果使用了变频调速来对起重机的机构进行控制,门座起重机的工作效率,工作时刻的损耗改善,工作人员的安全保证程度都能得到显著提升,例如不用在移动的情况下完成冷刹,对机构的损坏情况有改善。在不是较高速度的运动情况下,可以节省外部机构所消耗的能源,对原机构有回馈的反应。工作人员也可以根据实际情况来完成更大范围,更加精确,更加安全的调速行为。即使机构有所损坏,由于交流调速变频器对机构的控制,可以很快的进行工作,检测,也对保护机构和修理机构有巨大益处。
从电动机的转速公式
(2.1)
其中 f是供电的频率
s是转差率
p是极对数
如果单纯提高f即供电的电源频率,那么电动机的转速也会提高,电动机性能也会发生改变,对结果必然产生影响。所以不能仅仅变化f即供电的频率。
使用变频器来改变转速时,如果低于额定的功率,那么输出的电压大小和频率大小成正比,直到达到额定功率以后,电压将保持额定电压不变,频率的大小还会持续上升。变频调速就是通过这种调节电压和频率的大小关系来完成调速的目的。
2.2电动机选型
首先要考虑的电动机的选型工作,对此我们要对门座起重机工作时刻运行的阻力进行计算。
经过分析,是由多部分内容组合而成的,包括运动时刻和地表产生的摩擦力,门座起重机的下部分车轮与坡道产生的阻力力,以及一些其他原因例如风速等其他要素产生的摩擦力,这部分统一合计为另外的摩擦力 。
根据上诉分析我们可以得到 (2.2)
其中-门座起重机运行的总阻力,即我们要求的部分
-门座起重机运动时刻和地表产生的摩擦力
-门座起重机的下部分车轮与坡道产生的阻力
-一些其他原因例如风速等其他要素产生的摩擦力,这部分统一合计
- 先分析中-门座起重机运动时刻和地表产生的摩擦力 ,该部分经过分析得出主要包括的内容有门座起重机的多轮和地面接触产生摩擦力,门座起重机的轮轴承内部产生的摩擦力,门座起重机车轮一些其他因素引发的额外摩擦阻力。
根据公式有= (2.3)
分析其中各项数据-门座起重机运动时刻和地表产生的摩擦力
G-门座起重机的总体重量,本次设计采用的是10t的门座起重机,加上起重量所以G的大小为294000N
u-是门座起重机下部分车轮内轴承内部自己产生的摩擦因数,根据资料得知其大小为u=0.016
r-门座起重机下部分的车轮的轴径的长度,本次门座起重机其大小为r=80mm
f-门座起重机下部分的车轮沿着路径行走时刻,摩擦力到轴的距离,根据资料得知其大小f=0.6mm
d-门座起重机下部分的车轮与接触面长度,根据资料得知其大小为d=500mm
C-门座起重机车轮一些其他因素引发的额外摩擦阻力因数,根据资料得知其大小为C=1.5
计算-门座起重机运动时刻和地表产生的摩擦力的大小,==2187N
- 分析-门座重机的下部分车轮与坡道产生的阻力,其大小和门座起重机的自己重量和斜坡倾斜的角度大小有关。
根据公式=G*tanA, (2.4)
分析公式中各个因素,其中
G-门座起重机的总体重量,本次设计采用的是10t的门座起重机加上起重量,所以G的大小为294000N
- 是门座起重机运行的轨道和水平面之间夹缝角度的大小,一般tanA的大小是0.0025到0.0035之间左右,本次计算采用较小的0.0035
那么根据计算得到=G*tanA=294000N*0.0035=1029N
- 分析-一些其他原因例如风速等其他要素产生的摩擦力,实际上这部分主要部分由风速阻力承担,其大小和风力因素,风压的大小有关和门座起重机与风向的接触面积S有关。
根据公式= (2.5)
分析其中各个因素,其中
-门座起重机工作时刻的风力因素,根据资料得知其大小为=1.1
-门座起重机行走面向的风压大小,根据资料得知其大小为=4
S-和门座起重机工作时刻与风向正面的接触面积S,本次计算使用的10t门座起重机,其S大小为S=115.63.
那么根据计算可以得到==1.1*4*115.63=508N
在上述计算过程中我们分别得到了-门座起重机运动时刻和地表产生的摩擦力的大小,-门座重机的下部分车轮与坡道产生的阻力大小,-一些其他原因例如风速等其他要素产生的摩擦力大小。
根据公式 (2.6)
我们可以得到-门座起重机运行的总阻力,即我们要求的部分的大小为=2187N 1029N 508N=3624N
得到门座起重机运行的总阻力后,便可以通过公式 (2.7)
来求得门座起重机运行的功率
分析公式中各个因素
其中-门座起重机运行的总阻力
V-门座起重机下部分运行时的稳态速度,通过查资料得知其大小为每分钟30m
n-门座起重机内部运行效率,其大小为n=0.9
M-门座起重机下部分的电动机个数,其大小为M=1
那么根据计算我们可以得到=2.01kw
查资料通过门座起重机的使用手册和电机资料,使用用的电机型号为YZP112N-4,通过手册我们可以得知其额定的功率大小是4.5Kw高于门座起重机运行所需功率2.01kw,还可以了解得到其转速大小为1000r/min,JC=25%
值得注意的是,选用的电动机不一定完全符合该门座起重机的要求,某些情况下,或者电动机过量使用超过额定功率时刻,会对起重机的器件机构有一定的损坏,减少使用寿命,所以要对选用的电动机和该门座起重机进行热校检。
选用该电动机对该起重机进行热校检。首要我们要得到选用该电动机后,门座起重机的运行时刻的平均功率,通过公式= (2.8)
分析公式中各个因素
其中-门座起重机的运行时刻的平均功率
其中-门座起重机正常运行时刻负载的系数,通过查资料得知其大小为0.8
其中V-门座起重机下部分运行时的稳态速度,通过查资料得知其大小为每分钟30m
其中G-门座起重机的总体重量,本次设计采用的是10t的门座起重机加上起重量,所以G的大小为294000N
其中u-是门座起重机下部分车轮内轴承内部自己产生的摩擦因数,根据资料得知其大小为u=0.016
其中A-是门座起重机运行的轨道和水平面之间夹缝角度的大小,一般tanA的大小是0.0025到0.0035之间左右,本次计算采用较小的0.0035
其中-一些其他原因例如风速等其他要素产生的摩擦力,这部分统一合计,在前面的计算中我们得到其大小为508N
其中M-门座起重机下部分的电动机个数,其大小为M=1
其中n-门座起重机内部运行效率,查资料得知其大小为n=0.9
通过以上各因素代入公式中我们可以得到-门座起重机的运行时刻的平均功率的大小计算得为2.31KW
查资料通过门座起重机的使用手册和电机资料,使用用的电机为YZP112N-4,通过手册我们可以得知其额定的功率大小是4.5kw高于门座起重机运行平均功率2.31kw,还可以了解得到其转速大小为1000r/min,JC=25%,所以选用的电动机通过了校检,可以使用。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



