基于FPGA的直流电机控制器的设计毕业论文
2020-02-18 11:08:39
摘 要
目前主流的直流电机控制器主要是使用MCU或者DSP作为核心处理器,其本质还是以软件实现电机控制算法,所以本文设计了基于PFGA通过硬件实现的电机控制器。
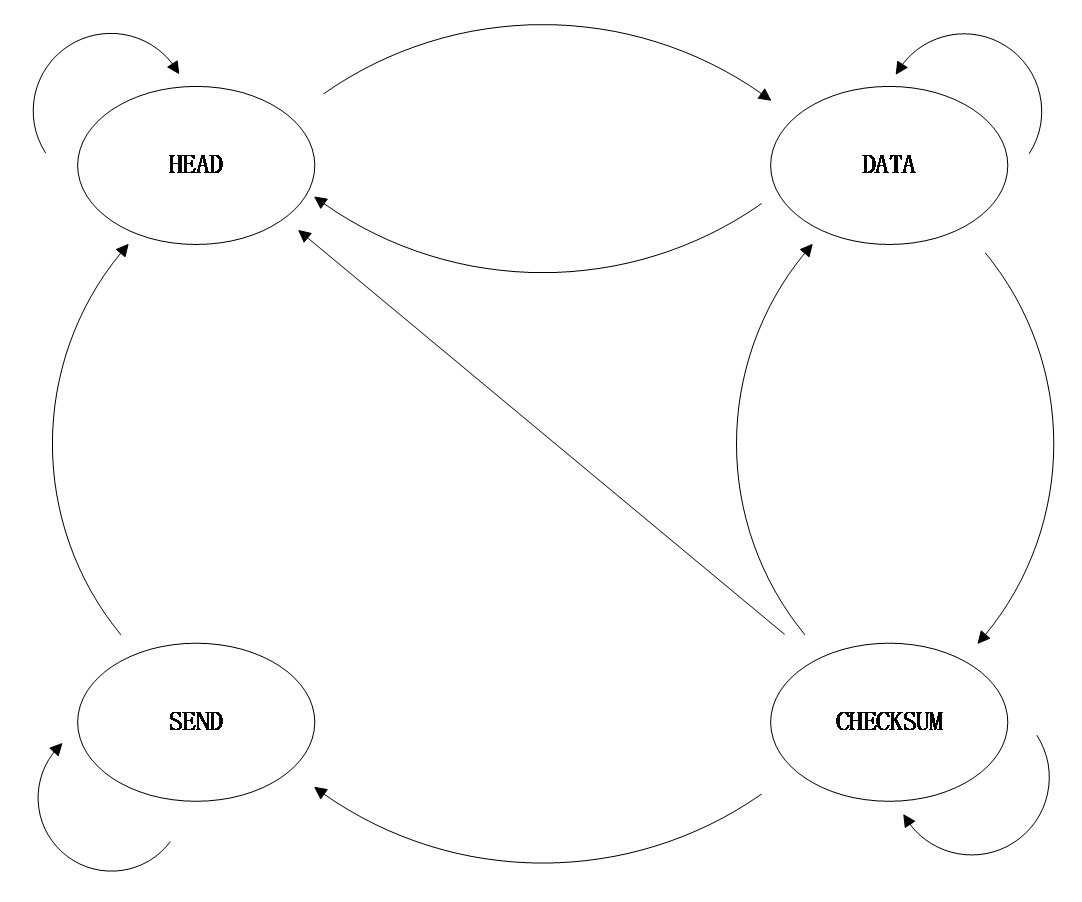
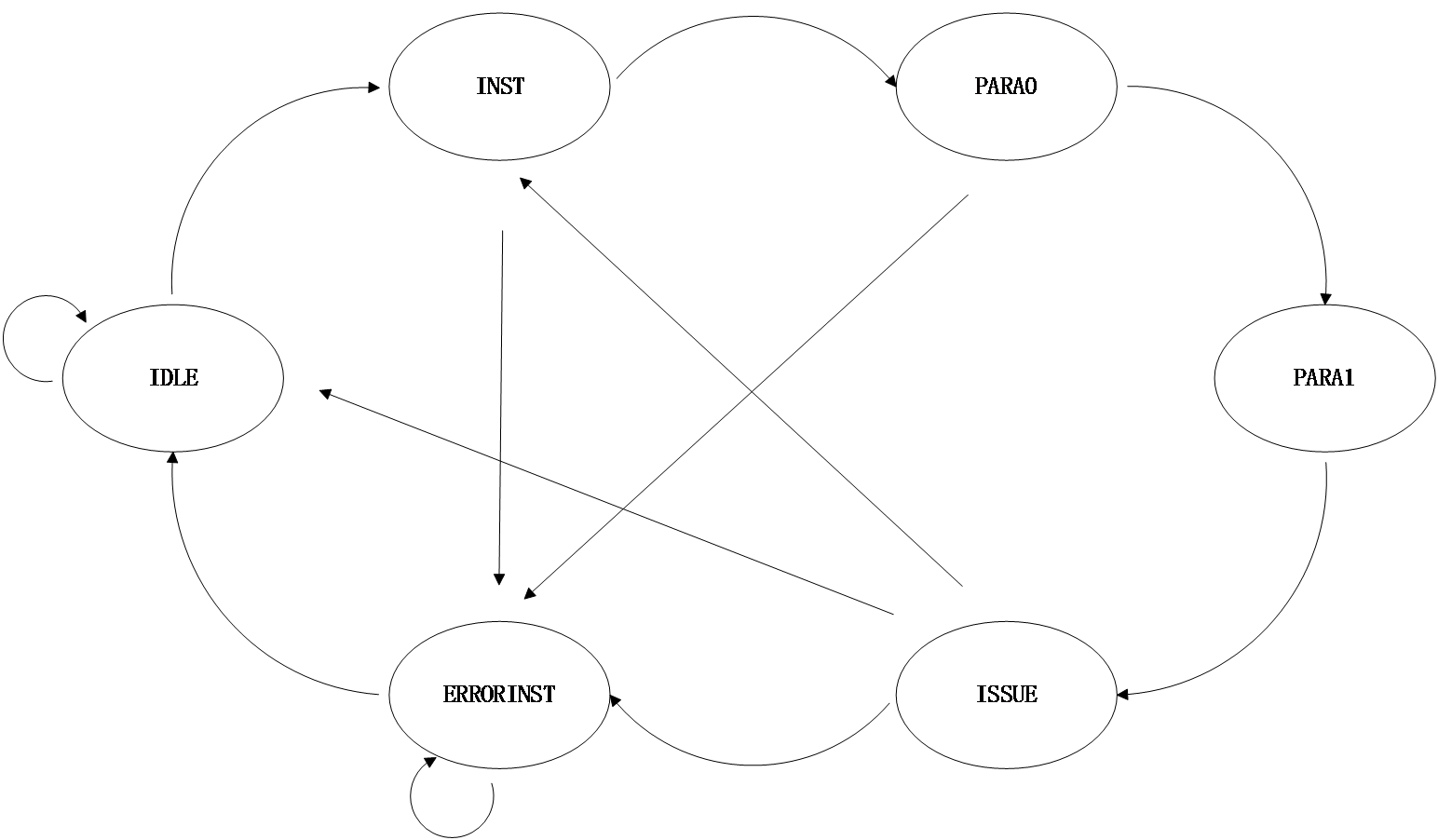
本文首先设计了使用硬件实现的双闭环电机控制算法,然后使用VHDL硬件编程语言编写了串口通信模块、指令解码模块、位置环和速度环PID模块、PWM波形生成输出模块、编码器计数模块、信息采集模块和数据发送模块等,并且实现了通过上位机发送指令到控制器控制电机运动并且配置参数然后控制器采集电机实时运动信息发送到上位机可以通过波形判断电机运动状态。
本文在控制器设计并且实现完成后,通过matlab和modeslim对其进行建模仿真以及RTL仿真,最后通过搭建实验平台,测试控制器的性能。
关键词:FPGA;直流电机;PID控制算法;双闭环控制
Abstract
At present, the main stream dc motor controller mainly uses MCU or DSP as the core processor, and its essence is to realize the motor control algorithm with software. Therefore, this paper designs the motor controller realized by hardware based on FPGA.
First, thesis uses double closed-loop motor control algorithm by hardware.And then using VHDL hardware describe language compiles decoding module, the position loop and speed loop PID module, PWM waveform generating output module, encoder counter module, information acquisition module and data sending module, etc. And realizing PC sends commands to the controller to control motor sport and configuration parameters and controller collects real-time motion information to send to PC .Therefore,we can judge motor motion state by waveforms.
In this paper, after completing the controller design and realization, I simulate the design by matlab and modeslim by RTL simulation. Finally, the performance of the controller is tested by building an experimental platform.
Key Words:FPGA;dc motor;PID algorithm;Double closed loop control
目 录
目 录 I
第1章 绪论 1
1.1 研究背景 1
1.2 国内外研究现状 1
1.2.1 国内研究现状 1
1.2.2 国外研究现状 2
1.3 研究意义 4
1.4 主要设计工作及章节安排 4
1.5 本章小结 5
第2章 相关理论基础及关键技术 6
2.1直流电机基本结构和控制原理 6
2.2 PID控制算法 7
2.2.1 模拟PID控制 7
2.2.2 数字式PID控制 8
2.3 RS232串口通信 8
2.4 FPGA技术 9
2.5本章小结 9
第3章 直流电机控制器的设计 10
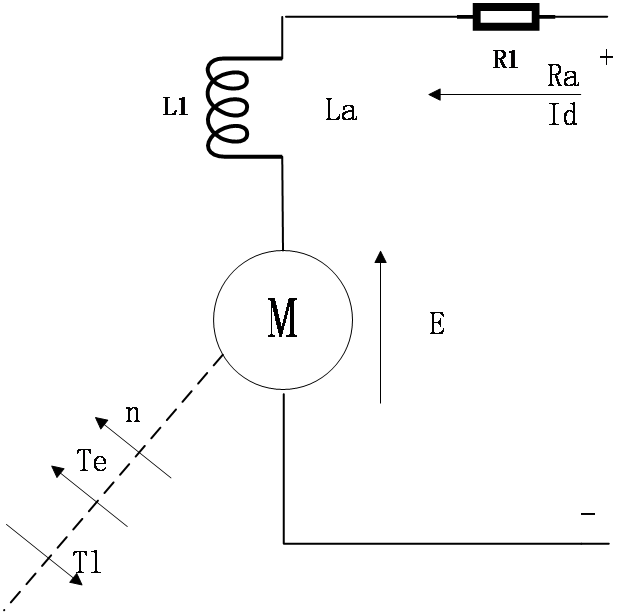
3.1 直流电机建模 10
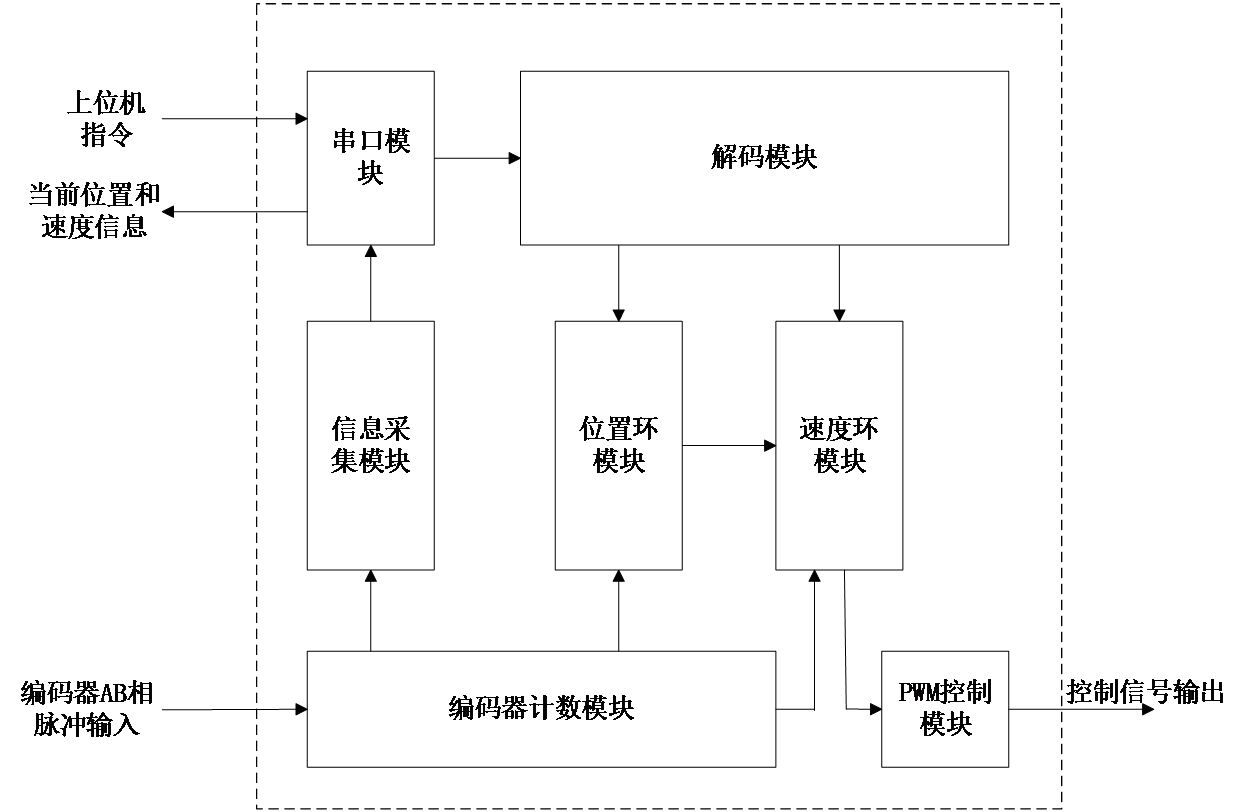
3.2 控制器整体框架 11
3.3 控制器子模块设计 12
3.3.1 串口通信模块设计 12
3.3.2 指令解码模块设计 14
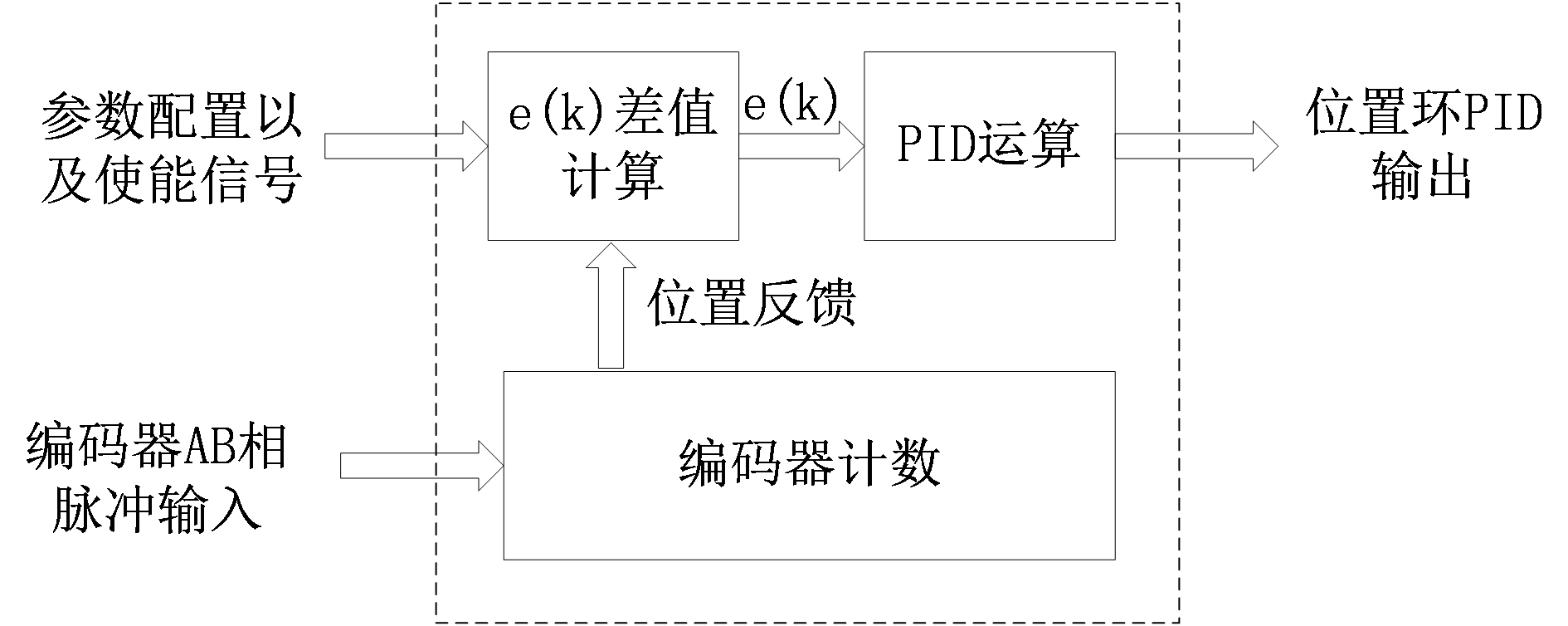
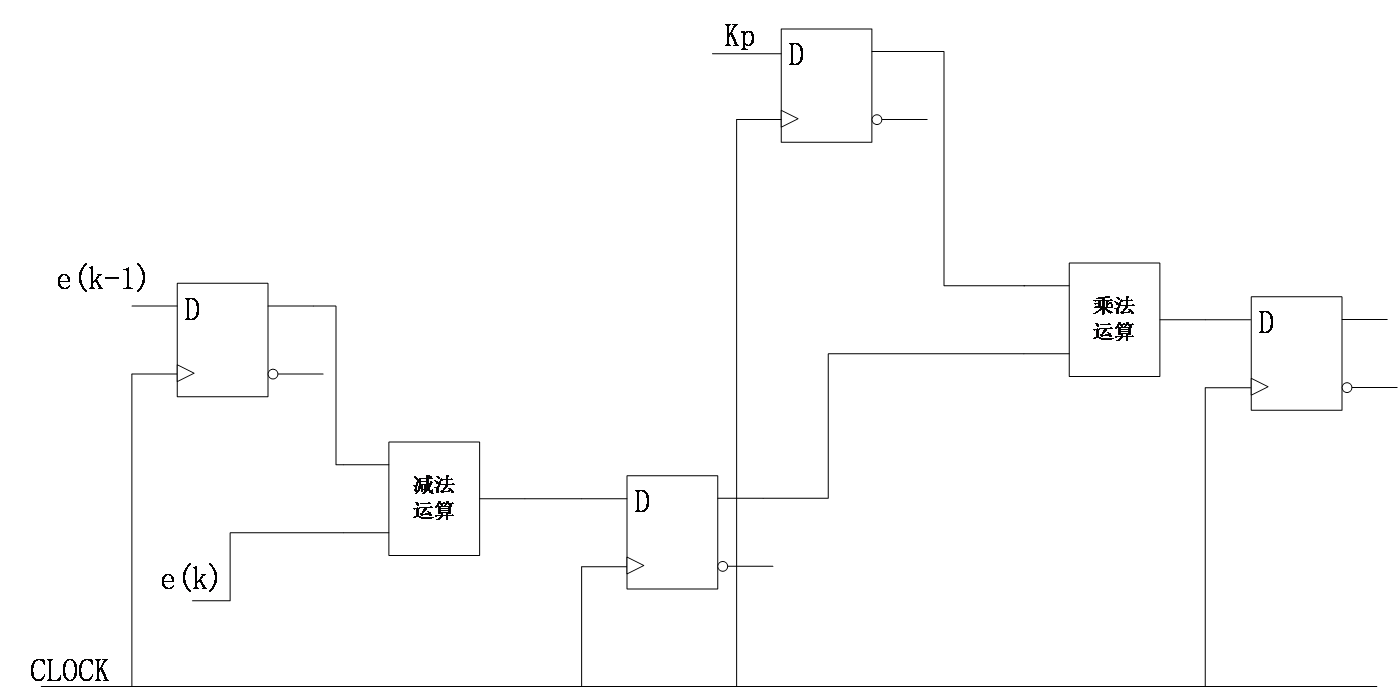
3.3.3 位置环模块设计 16
3.3.4 速度环模块以及PWM控制模块设计 18
3.3.5 编码器计数模块设计 19
3.3.6 信息采集模块设计 21
3.4 控制器仿真验证 21
3.4.1 matlab仿真验证 21
3.4.2 modelsim仿真 23
3.5 本章小结 23
第4章 基于PFGA的直流电机控制器的实现 24
4.1 控制系统整体框架设计 24
4.2 硬件选型 24
4.2.1 FPGA选型 24
4.2.2 驱动模块方案选择 25
4.3 FPGA编译结果 25
4.4 控制器的FPGA测试 26
4.4 本章小结 28
第5章 总结与展望 29
5.1 总结 29
5.2 展望 29
参考文献 30
致谢 31
第1章 绪论
1.1 研究背景
人们的生活已经离不开电能,而在电能生产和运输方面,电机更是起着非常重要的作用。在各种电机中被广泛应用的还是直流电机,这是由于它很多优点,比如说调速范围广、性能好、模型简单并且易于快速启动、停止而且控制简单。同时还因为质量比较轻和体积较小等优点被广泛应用于航空、汽车和医疗器械等领域。
而在于对直流电机的控制方面,基本是使用脉宽调制(PWM)进行控制,并分为两种控制模式:使用数字的方法进行控制和模拟电路控制。随着集成电路、现代电力电子技术控制理论的发展,PWM控制技术已经从原来的提供动力为目的的应用转向现在为对电动机精确的控制。并且PWM电机控制方法也由模拟分立元件构成的电路向全数字电路方向发展。但是由模拟器件搭建的控制器设计太过复杂,器件繁多,控制精度差,不能满足设需求,所以目前使用的PWM控制技术基本上采用数字控制的方法[1][2]。而在数字控制的方法中,主要有通过MCU、DSP、FPGA等为处理器的控制方法。
1.2 国内外研究现状
1.2.1 国内研究现状
我国在电机的应用生产方面起步比西方晚了一百年,但是发展速度极快,尤其是在改革开放时期,小功率电机产业更是取得了长足进步。虽然在这四十多年的发展过程中,涌现出了许多具有一定规模的企业,并且生产的产品也有着良好的口碑和市场,但是至今没有一个品牌能在国际中崭露头角,更不用说具有强大的国际影响力。随着中国的一步一步开放,越来越多的境外企业来中国投资,与之而来的当然还有先进的技术和管理经验。这就促进了电机行业结构的优化,也促进了国内行业的发展以及技术进步[3]。
在电机控制技术方面,二十世纪六十年代左右,我国研制出了第一支晶闸管,从此以晶闸管为主要器件的直流电机调速系统得到了迅猛的发展并且得到了广泛的使用。对于数字直流电机调速系统,国内的技术方案主要为PID算法优化、模糊控制技术、补偿PID控制与综合性最优控制等。随着电力电子器件的发展,具有开关速度快、热稳定性好、安全工作区大等优点的IGBT(绝缘栅双极型晶体管)替代了晶闸管,这也标志着我过直流电机调速控制开始朝脉宽调制(PWM)控制方向发展[4]。
到了二十世纪七十年代,由于我国的军事方面和航空航天等方面的需求,我国的科研机构包括高校以及研究所才开始对基于先进的控制算法的直流电机控制器开始研究。
二十世纪九十年代之后,直流电机开始应用于工业领域,但是由于当时控制技术有限,无法满足需求。
近几年来,国家对直流电机控制器进行政策上的扶持和鼓励,逐渐形成了高新技术企业为主,联合高校与科研院所进行联合研发的发展体系。
1.2.2 国外研究现状
在国外,电机控制器的发展可以主要分为以下几个阶段:
首先是上个世纪四十年代到五十年代,随着电机及其控制技术的发展,美国的MIT首先研发出来了世界上第一个电机控制系统,是提供给美国军方使用的火炮自动跟踪系统。这种控制系统毕竟是世界上第一个控制系统,所以其性能在今天来看还是有着巨大的缺陷。随着二战的爆发,各国军方对于电机控制系统的要求也越来越高,这也直接推动了电机控制系统的发展。
然后是上个世纪六十年代到七十年代,随着控制技术的发展,并且由于之前的控制系统在控制精度,响应速度,处理数据的能力等方面无法满足需求,于是电液闭环控制系统被发明以及广泛的应用开来,并且各国的学者对于此控制系统进行了逐步的完善使其的响应速度大幅度加快并且当速度较低时,稳定性很好。但是随着该控制系统的广泛使用,他的缺点也逐渐地暴露出来,主要是由于其自身的机械装置导致的问题比如工作的维护和日常的修理会异常困难。
到了上个世纪八十年代开始,晶体管的发展给电机控制提供了新的方向。早期电力电子技术的发展基本上都是为了电机控制而服务的。随着对电力电子技术研究的深入,控制系统逐渐进入了人依靠先进的控制理论为核心,电力电子器件作为硬件实现的时代。
到现代,有很多公司都有了成熟的技术,例如美国的GE公司、日本的三菱公司以及德国的西门子公司等等,都已经有了商品化的数字直流调速系统,并且对于不同情况都有相应的解决方案[5][6]。国外已经有了成熟的产业化的控制技术。目前主流的数字调速系统主要采用单片机或者DSP作为解决方案。ARM系列单片机以STM32为代表的的处理器的优点是成本低廉,设计较为简单,应用较为广泛[7][8]。但是其运算速度和处理数据的能力很难达到电机控制算法的要求,无法对较为复杂的算法及时的运算,并且反应速度较慢,响应时间较长。DSP处理器的优点是处理速度高,但是其外围电路设计过于复杂,灵活性很低而且其本质由于内部硬件电路结构已经固化所以设计的还是软件层次[9][10]。
而在直流电机控制器中,最重要的是控制算法,直流电机控制器的控制性能直接取决于其使用的控制算法,控制算法和控制策略是整个直流电机控制器的核心。
直流电机控制器控制电机的变量主要有电机转速、电机转速加速度、电机位置、电枢电流、电枢电压等。能够应用到直流电机控制器的算法种类也有很多,PID控制算法是传统的控制算法的代表[7],但是随着控制理论和技术的不断发展与进步,各种先进的控制算法也相继问世,例如:遗传算法、模糊控制算法、最优化控制、预测控制算法、无模型自适应控制算法、自抗扰控制算法和滑模控制算法等等。表1.1中列出了几种控制算法的优缺点[11]。
PID控制算法因为其结构简单、稳定性好、可靠性高等优点,并且加上直流有刷电机大多可以转换为线性,结构稳定和非时变的数学模型,所以PID控制算法在直流电机控制器中具有非常广泛地应用[12]。
表 1.1 常见的控制算法
算法名称 | 算法介绍 | 优点 | 缺点 | |
PID算法 | 依据被控量的偏差,由比例单元、积分单元和微分单元构成的控制器进行控制。 |
|
| |
模糊控制 | 模拟人的推理,通过长期的经验积累来得到所预期的控制效果的一种控制算法。 |
|
| |
神经网络控制 | 模拟人的大脑神经生物结构,有效解决非线性系统建模难的问题,能学习和适应不确定过程的动态特性。 |
|
| |
滑模控制 | 一种特别的非线性,不连续的控制方法。其不同之处在于系统的结构不固定,可根据系统的状态不断地变化,从而迫使非线性系统的状态轨迹进入滑动超平面并保持滑动状态。 | 1、几乎不依赖于模型; 2、鲁棒性强; 3、控制规律简单; | 1、频繁告诉的开关切换会带来高频抖动; 2、抖动可能会产生系统为建模动力学特性[14]。 | |
1.3 研究意义
随着现代电力电子技术的高速发展,半导体器件的功率增大以及开关频率增高高,使得PWM控制特性越来越好,以此为基础,开发了多种先进的电动机控制方法,为提高直流电动机控制性能提供了物质基础,同时也对承担直流电动机控制任务的控制驱动器提出了极高的要求,主要有:①极强的数据处理能力,在微秒级的短时间内需要处理大量的数据,完成复杂的计算和状态管理;②精确的控制能力,在直流电机控制系统中,电压、电流等物理量变化速度极高,多层面的物理过程必须精密配合,容不得半点差错;③可靠的状态管理,保证直流电机系统适应不同的对象、环境。根据以上这些要求,单片机或者DSP驱动电机,占用接口资源多,所需周边元器件也比较多,对整个系统的稳定性和可靠性都有较大的影响[15]]16]。FPGA的数字PWM控制对于DSP和MCU来说具有精度高、更容易控制、响应时间短的优点。而且传统电路原理图设计系统工程中的很多缺点,由于硬件描述语言的出现而得到解决,基于EDA技术的芯片正在成为主流。FPGA器件在电机驱动特别是PWM控制技术方面的应用也越来越广泛,正在向着高速度、高集成度和低功耗的系统集成方向发展,所以基于FPGA的数字PWM控制技术被人们广泛的运用,因此研究基于PFGA的直流电机控制技术具有十分重要的意义。
1.4 主要设计工作及章节安排
直流电机控制器,是要在可视化上位机中,实现对直流电机的闭环控制,主要的控制量为电机的转速和电机转动的位置。结合实际经验,对直流电机控制器的总体设计进行需求分析,分别为以下几点:
1) 直流电机控制器需要对电机进行闭环控制,在本设计中,需要控制的量为电机的转速和电机的位置。
2) 直流电机控制器要可以通过串口接收并且发送数据,控制电机的运行状态并且进行参数的配置和运动状态的反馈。
3) 直流电机控制器必须要运行稳定并且可靠。
本文的主要设计工作为:
1)电机位置、速度双闭环控制结构的设计。
2)PID算法的应用以及硬件实现。
3)控制器与上位机数据发送与接收模块的设计。
4)指令以及解码模块、编码器计数以及信息采集的设计。
本文以直流电机为研究对象,通过对研究现状的分析结合相应的关键技术的理论对直流电机进行建模仿真然后对控制器的各个模块进行了设计并且最终进行了实验验证了控制器的性能。全文章节内容安排如下:
第一章,首先介绍了课题的研究背景研究意义以及国内外的发展现状,并且对设计需求进行了分析列出了主要的设计工作。
第二章,介绍了直流电机控制中要应用到的相关的关键技术以及理论基础。
第三章,对于直流电机进行建模,然后对控制器进行了整体设计,在此基础上对各个模块进行了设计并且对相应的功能和工作流程进行了详细的介绍。
第四章,在完成控制器的各个模块设计之后,通过对FPGA器件及其对应的开发板和对外接电路—电机驱动模块进行了相应的选型,完成了基于FPGA的直流电机控制器的实现,然后通过quartusⅡ 软件对工程进行了语法检查和编译,并且给出对应的硬件资源的使用和最高主频。最后对实际的控制器进行了实验验证并对实验结果进行了分析。
第五章,总结了全文的工作,并且指出了设计中的不足提出了对应的改进意见。
1.5 本章小结
第一章主要介绍了背景、直流电机控制器的发展以及研究的意义。然后通过对需求的分析列出了主要的设计工作然后对各个章节的工作进行了安排。
第2章 相关理论基础及关键技术
2.1直流电机基本结构和控制原理
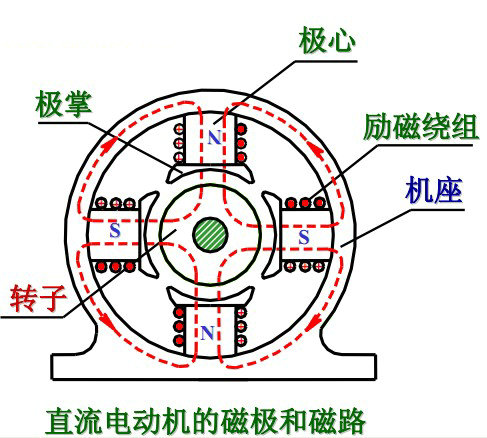 图2.1是直流电机对轴端剖面图中我们可以看出,定子和转子是组成直流电机的主要组成部分。定子,顾名思义,就是固定在电机中的,他主要包括机座、电刷装置、换向极和主磁极等部分。
图2.1是直流电机对轴端剖面图中我们可以看出,定子和转子是组成直流电机的主要组成部分。定子,顾名思义,就是固定在电机中的,他主要包括机座、电刷装置、换向极和主磁极等部分。
图2.1 流电机对轴端剖面图
机座:现在的直流电机大多数采用的整体机座,一方面可以对整个直流电机的机械结构进行支撑,另一方面,现在的机座大多数采用导磁性较好的材料制成,所以还有导磁的作用。
电刷装置:电刷的主要作用是将外部的电信号输入到旋转的电枢绕组中。
换向极:换向极外一般都会有换向极绕组,流过电枢电流。
主磁极:通过在主磁极上利用通电导线绕制励磁绕组,然后对励磁绕组通过励磁电流对主磁机进行励磁,这样会使主磁极产生按照一定形状分布的气隙磁密在电枢外的气隙空间中。这也是目前市场上绝大多数的直流电机采取的励磁方法,然而还有一些小型小功率的直流电机往往会采用永久磁铁作为主磁极。
转子与定子相对应,主要是电机中进行运动的结构,他主要包括电枢铁芯、轴承、转轴、换向器、电枢绕组等。在这里主要介绍电枢铁芯和电枢绕组。
电枢铁芯和电枢绕组:作为主磁路的一部分,电枢铁芯上面有可以放置电枢绕组的槽,所以电枢绕组就是用导线通过电枢铁芯绕成的线圈,并且每个线圈的两端与换向器相连。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



