一种新型的内置式永磁同步电机无位置传感器低速控制策略毕业论文
2020-04-08 14:24:41
摘 要
内置式永磁同步电机(interior permanent magnet synchronous motor,IPMSM)由于其高转矩密度和高效率等优点而被广泛应用。为了实现的永磁同步电机磁场定向的矢量控制,需要获得准确的转子位置和转速信息。通常,转子位置是由机械传感器获得的。然而,这些传感器会带来若干缺点。因此,无传感器控制技术成为研究热点。为了在电机低速运行时,能够实现对转子位置和转速信息的准确观测,采用基于高频信号注入法的无位置传感器控制技术。与传统的旋转高频注入法和脉振高频注入法相比,脉振高频方波注入法大大提高了注入频率,提高了系统的动态性能。然而高频信号注入法中滤波环节的引入会限制系统的带宽,降低系统的动态性能。所以,本文对基于脉振高频方波注入法的IPMSM无位置传感器低速控制系统进行研究,提出一种基于无滤波器脉振高频方波信号注入法的IPMSM无位置传感器低速控制策略。
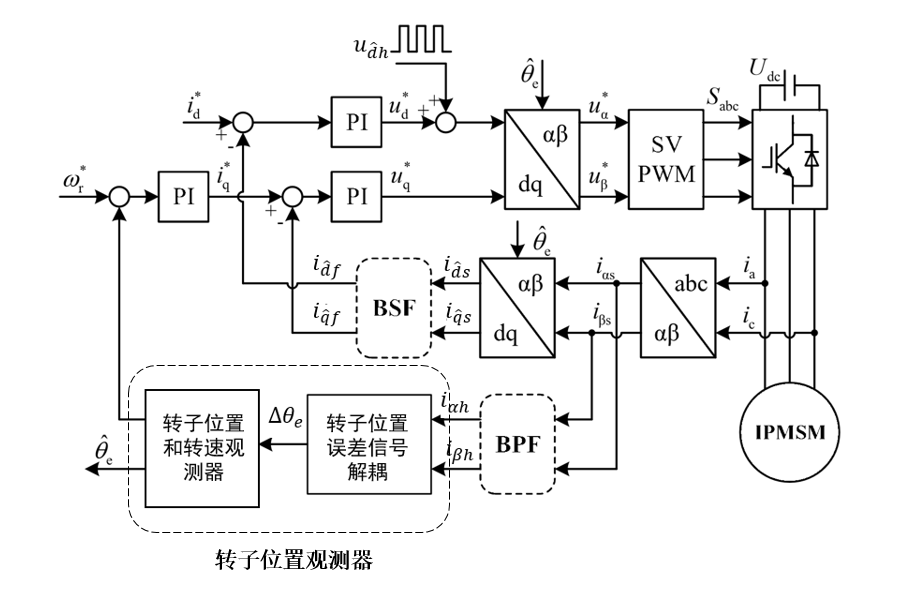
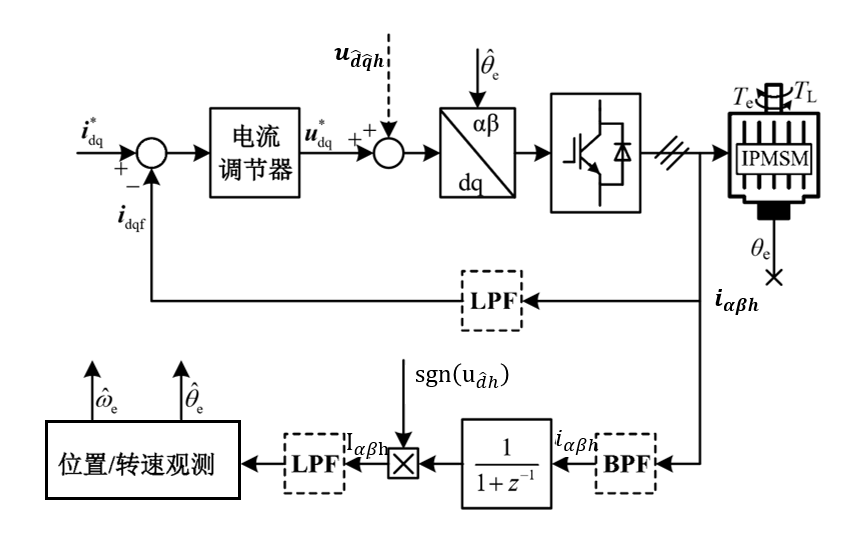
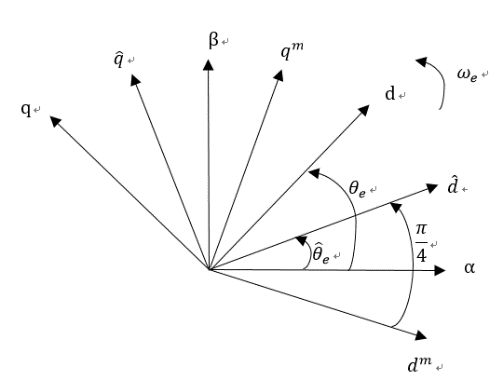
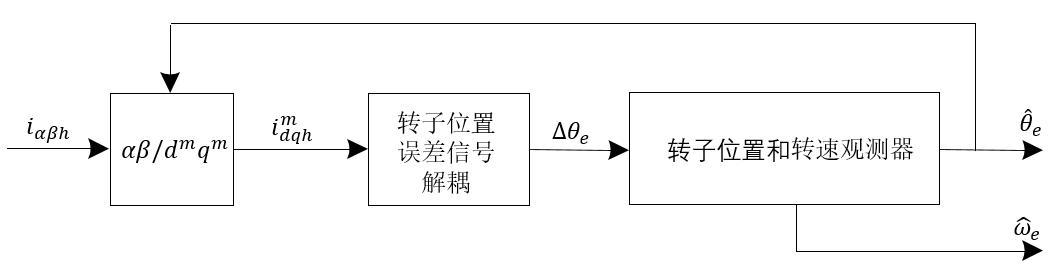
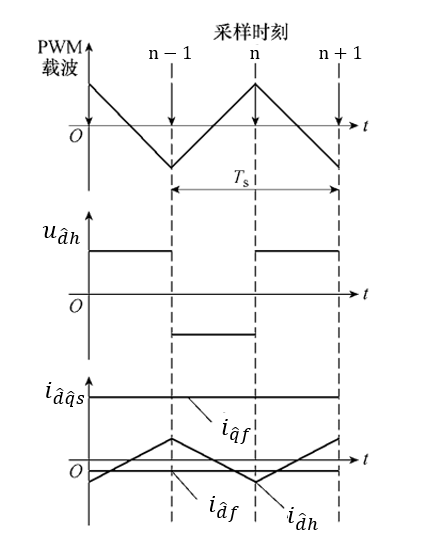
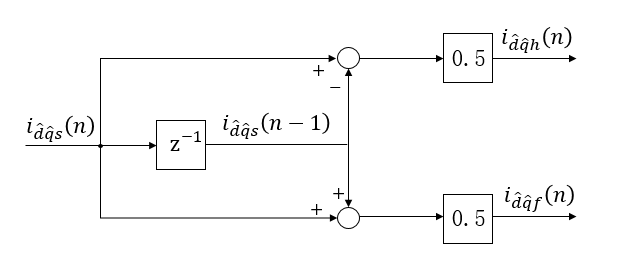
首先在建立IPMSM的数学模型的基础上,给出基于脉振高频方波信号注入法的IPMSM的无位置传感器矢量控制系统的原理框图,然后对其中的四个部分:高频信号注入部分、载波信号分离部分、转子位置误差信号解耦部分和转子位置和转速观测器部分进行分析,并对载波信号分离部分提出优化方案。接着设计出转子位置误差信号解耦部分和转子位置和转速观测器部分的结构框图。最后在MATLAB/Simulink环境下搭建系统仿真模型,对本文所提出的方案的可行性进行证明。
关键词:内置式永磁同步电机;脉振高频方波信号注入法;无位置传感器控制;
无滤波器;载波信号分离
Abstract
Internal permanent magnet synchronous motor (IPMSM) is widely used in various industrial applications because of its high torque density and high efficiency. In order to achieve high-performance, field-oriented vector control of permanent magnet synchronous motors, it is necessary to obtain accurate rotor position and speed information. In general, the rotor position is obtained by a mechanical sensor. However, these sensors have several disadvantages. Therefore, sensorless control technology has become a research hotspot. In order to accurately observe the rotor position and rotational speed information when the motor is running at a low speed, a position sensorless control technique based on a high frequency signal injection method is adopted. Compared with the conventional rotating high-frequency injection method and the pulsed high-frequency injection method, the pulse high frequency square wave injection method greatly increases the injection frequency and improves the dynamic performance of the system. However, the introduction of the filter section in the high frequency signal injection method will limit the system bandwidth and reduce the dynamic performance of the system. Therefore, this paper studies the IPMSM sensorless low speed control system based on pulse high frequency square wave injection method, and proposes an IPMSM sensorless low speed control strategy based on the high frequency square wave signal injection method without filter pulse.
First, on the basis of establishing the mathematical model of IPMSM, the principle block diagram of the position sensorless vector control system of IPMSM based on pulse high frequency square wave signal injection method is given, and then the four parts of the signal are injected into the high frequency signal, The carrier signal separation section, the rotor position error signal decoupling section, and the rotor position and speed observer section are analyzed, and an optimization scheme is proposed for the carrier signal separation section. Then the structural block diagram of the rotor position error signal decoupling part and rotor position and speed observer part is designed. Finally, the system simulation model was built in MATLAB/Simulink environment to prove the feasibility of the proposed scheme.
Keyword:interior permanent magnet synchronous motor;Pulse high frequency square wave signal injection method;Sensorless control;Without filter;Carrier signal separation
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究目的和意义 1
1.2 国内外研究现状 2
1.2.1 PMSM矢量控制研究现状 2
1.2.2 脉振高频方波信号注入法研究现状 3
1.2.3 减少滤波环节研究现状 4
1.3 研究内容 6
第2章 无位置传感器IPMSM矢量控制系统数学模型 7
2.1 PMSM概述 7
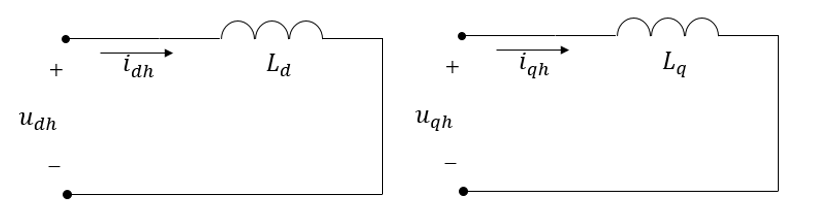
2.2 IPMSM数学模型 8
2.3 IPMSM矢量控制系统 10
2.4 脉振高频方波信号注入法原理 11
2.5 脉振高频方波信号注入法优化 13
2.6 本章小结 15
第3章 转子位置观测器设计 16
3.1 结构框图设计 16
3.2 转子位置误差信号解耦电路设计 16
3.3 转子位置和转速观测器设计 17
3.4 仿真模型搭建 18
3.5 本章小结 19
第4章 仿真研究 20
4.1 系统仿真模型搭建 20
4.2 仿真调试 21
4.3 仿真结果分析 22
4.4 本章小结 23
总结与展望 24
致谢 25
参考文献 1
附录 3
第1章 绪论
1.1 研究目的和意义
永磁同步电机(permanent magnet synchronous motor,PMSM)具有高转矩密度[1],高功率密度和高效率的优点,被广泛应用于工业驱动领域。永磁同步电机按照永磁体安装位置的不同可以分为两种:表面式永磁同步电机和内置式永磁同步电机[2]。内置式永磁同步电机具有功率密度高和效率高等特点,在工业场合、交通运输等众多领域都有着非常广泛的应用[3]。
为了实现永磁同步电机的磁场定向控制,需要获得准确的转子位置和转速信息。通常,转子位置通过机械传感器获得[4,5],尽管采用安装机械传感器的检测方法最直接有效,但是机械传感器的安装不仅对使用环境有着比较严格的要求,还会增加系统体积和重量,也提高了系统成本。无位置传感器控制技术就是通过检测电机中所产生的相关信号,对其进行特定的信号处理过程进而实现转子位置和转速辨识,代表着永磁同步电机控制系统的发展趋势。中高速无位置传感器技术,依据电机基频模型实现,通过基频激励的反电动势来估算出转子位置信息。然而由于电机反电动势的大小与转子转速成正比,当电动机运行在零速或者极低速条件下时,有用信号的信噪比会严重降低[5],通常在这种情况下很难提取转子位置和转速信息,最终将会导致在电机零速和低速运行时这类方法没有办法实现转子位置和转速信息的估计。高频信号注入法可以有效解决这一问题,可以使电动机运行在包括零速在内的所有速度下都可以准确估算出转子位置和转速信息。
高频信号注入法的基本思想是将额外的高频电压(电流)信号叠加到电机的基波信号上,两者共同施加给电机三相绕组,定子绕组中所产生的相应的高频电流(电压)响应中将含有转子位置信息,可使用带通滤波器或者高通滤波器,把这一电流(电压)信号分离出来并进行适当的信号处理,就可辨识出转子位置和转速信息。目前,注入的高频电压信号主要包括两种:旋转高频电压信号注入和脉振高频电压信号注入。例如:Lorenz R D最早提出了高频旋转正弦注入法,此方法是通过在静止坐标系注中入旋转正弦电压信号,使用带通滤波器将高频电流响应分离出来,从所得到的高频电流响应的负序分量中解调出转子位置信息[6]。韩国首尔大学的Sul S K提出高频脉振正弦注入法,通过在同步观测轴系中注入脉振电压信号,使用滤波器将高频电流响应抽取出来并解耦转子位置误差信号,进而估算出转子位置和转速信息[7]。此后,各国学者还提出了各种将不同高频信号注入到不同坐标系中的方法。然而,在具体实施过程中,这些高频信号注入法通常都需要使用滤波器进行信号解调,即通过带通滤波器或者高通滤波器将高频电流响应抽取出来进而估算出转子位置和转速信息,通过带阻滤波器得到基频电流响应信号作为电流反馈值进而实现电流闭环。然而,选取合适的滤波器和对参数进行整定并不是一件简单的事情,并且其引入也会限制电流环带宽,造成系统动态性能下降,同时多个滤波器的滞后效应叠加还会影响转子位置和转速观测的准确性。
针对滤波环节的引入问题,有必要研究一种基于无滤波器的内置式永磁同步电机无位置传感器低速控制策略来解决滤波器所引发的一系列问题。
1.2 国内外研究现状
1.2.1 PMSM矢量控制研究现状
矢量控制控制技术是在1971年由德国西门子公司工程师Felix Blaschke提出,运用于交流电机转矩控制,该控制技术的提出具有划时代的重大意义。矢量控制又被称作磁场定向控制,该控制方法基于同步旋转坐标系[5],将定子电流矢量分解得到励磁电流和转矩电流,并对这两个电流分量分别进行矢量控制来控制定子电流矢量,以实现对交流电机转矩的高性能控制[8]。所以,对定子电流矢量的幅值和相位进行控制是矢量控制技术的关键所在。矢量控制技术最先被运用在感应电机上,并很快得到推广,广泛应用在同步电机上。现阶段,矢量控制技术在永磁同步电机上已经得到广泛应用[9]。矢量控制的优点是实现简单,性能良好。该控制技术的缺点是系统性能对电机参数变化比较敏感,并且矢量旋转坐标变换比较复杂。现阶段,德国和日本在矢量控制技术的研究领域中处于世界领先地位。在日本,有许多电机公司对电机矢量控制的发展贡献了比较大的力量。
根据应用场合的不同,对电机所应采用的矢量控制策略也有所不同,主要的控制方法包括:=0控制、=1控制、弱磁控制和最大转矩电流比控制等[10]。
1)=0控制就是将定子电流矢量分解得到的d轴上的励磁电流分量置零,通过控制q轴上的转矩电流分量来控制电磁转矩。此方法的优点是控制易于实现,可以确保电磁转矩随着转矩电流的变化呈线性变化,控制系统的转矩特性优异。缺点是当负载增加时,定子电压会随之增大,这就对控制系统中逆变器的容量提出了更高的要求。
2)=1控制就是控制功率因数恒为1。此方法的优点是永磁同步电机的功率因数高,可以使逆变器的容量得到充分的利用。但是由于转子励磁是几乎不产生变化的,而转矩绕组的总磁链是会随着负载的变化而产生变化的,因此转矩与定子电流之间的线性关系会被打破[11]。
3)弱磁控制的基本原理就是当电机电压达到最大值时,通过调节励磁电流,将其适当地减小来实现磁场弱化的效果,由此继续提高电机转速。在实际应用中,通常增大d轴去磁电流来实现弱磁提速,然而这种控制方式具有相对较小的电机转速调节范围。
4)最大转矩电流控制就是通过对d轴电流和q轴电流进行矢量控制,使产生要求的转矩控制时所需要的定子电流最小。该方法的优点是能够有效降低系统损耗,同时也会降低系统成本。其缺点是随着输出转矩的增大,电机的功率因数会快速降低[1]。
1.2.2 脉振高频方波信号注入法研究现状
1)无位置传感器控制技术的研究现状
20世纪80年代后期,国外的学者开始将注意力转向永磁同步电机的无位置传感器控制技术的研究[12,13]。目前,按照转子位置辨识的基本原理,永磁同步电机的无位置传感器技术主要可以分为两种:一种是基于电机反电动势的方法,该方法只适用于电机中高速运行;另一种是基于高频信号注入的方法,此方法适用于电机零速和低速运行。
基于电机反电动势的方法,通常是依据电机基频模型实现,使用基频激励的反电动势来估算出转子位置信息。具体的模型法主要包括:模型参考自适应法、扩展卡尔曼滤波器法和滑模观测器法[14,15,16]等。模型参考自适应法是基于稳定性设计的,可以保证转速估计的渐近收敛性[8],同时由于估计系统采用闭环控制,所以使用该方法的辨识精度较高;但是在计算可调模型时,受电机参数变化的影响,并且辨识速度相对较慢。扩展卡尔曼滤波器法可以对噪声进行有效地抑制,具有较好的抗干扰能力,但是该方法的计算量很大,并且对硬件性能要求也比较高。滑模观测器法通过滑膜变结构控制实现转子位置和转速估计,对系统参数变化有很好的鲁棒性,但是存在系统抖动问题。由于电机反电动势的大小与转子转速成正比,当电机零速和极低速运行时,反电动势的信噪比很低,通常在这种情况下很难提取转子位置和转速信息[5],最终将会导致基于电机反电动势的方法在电机零速和低速运行时无法实现转子位置和转速信息的估计。所以,该方法只适用于电机中高速运行。
基于高频信号注入的方法,其基本原理是将一定形式的高频电压(或电流)信号叠加到电机的基波信号上,利用电机转子的凸极特性,定子绕组中产生的高频电流(或电压)响应信号中将包含着转子位置信息,通过检测该响应信号并采用适当的信号处理技术来获取转子位置和转速信息。具体方法包括:旋转高频正弦注入法,脉振高频正弦注入法、脉振高频方波注入法等[17]。高频信号注入法适用于包括零速在内的所有速度,该方法的实现方式简单灵活,并且不受电机参数变化的影响,对电机参数具有较强的鲁棒性,具有更加广阔的应用前景;但是这种方法可能面临着收敛时间长,潜在启动失败,系统稳定性有限等问题。
2)高频注入法研究现状
当永磁同步电机运行在零速和低速条件下时,高频注入法可以确保其可靠平稳地无位置传感器运行。根据所注入的高频信号形式的不同,高频信号注入法可以分为旋转高频正弦注入法、脉振高频正弦注入法和脉振高频方波注入法[17]。注入的高频信号既可以是电压信号,也可以是电流信号,当注入的高频信号是电压信号时,通过检测定子绕组中所产生的高频电流响应实现转子位置信息估算;当注入的高频信号是电流信号时,则需对相应的高频电压进行检测并进行适当的信号处理。
Lorenz R D最早提出了旋转高频正弦注入法,该方法的基本思想是在静止坐标系中注入一个三相正弦高频电压信号,PMSM的定子绕组中将会产生相应的高频电流响应,通过检测该高频响应并提取出转子位置误差信号,最后采用特定的信号处理技术估算出转子位置和转速信息[18]。这种方法的优点是比较容易实现,方便提取携带转子位置信息的高频电流响应;缺点是会造成转矩脉动和高频损耗,同时在对高频电流响应进行信号处理的过程中,有多处要使用滤波器,实现过程比较复杂。主要应用于检测凸极率较大的IPMSM的转子位置信息。
脉振高频正弦注入法是在同步旋转观测坐标系中注入脉振高频电压信号[19],通过检测相应的高频电流响应并提取出转子位置误差信号,进而通过特定的信号处理过程获得转子位置和转速观测值。该方法最早由Sul S K提出,主要应用于凸极率较小的内置式和表贴式三相PMSM转子位置和转速信息的检测。该方法可以避免发生转矩脉动和高频损耗,并且取消了q轴电流反馈的低通滤波器的使用,可以提高系统的带宽和动态性能;但在对高频电流响应进行信号处理的过程中仍有几处需要使用滤波器,实现过程比较复杂。
旋转高频正弦注入法和脉振正弦注入法中所注入的高频信号形式都为正弦信号,注入频率较低,限制了系统动态性能的提高。因此,为了提高系统的动态响应速度,有学者提出脉振高频方波信号注入法[20]。该方法的信号注入方式相似于高频脉振正弦注入法,只是注入的高频信号的形式不同,脉振高频方波注入法是在同步旋转观测坐标系的d轴注入脉振方波信号[21]。该方法具有较高的注入频率,可以削弱高频噪声,并且可以提高系统的动态响应速度。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



