瓶装调味品的装箱装置的结构设计开题报告
2020-03-19 12:33:20
1. 研究目的与意义(文献综述)
(1)总述:
装箱装置是用于完成运输包装过程中将包装成品按一定排列方式和装入包装件中。在自动包装流水线中,装箱装置是整线系统运行的核心,包装机械虽不是产品直接生产机械,但它却是实现生产自动化所必需的。主要生产的装箱装置要求运行平稳可靠,包装效果牢固美观配置高,主要元器件选用国际著名品牌设备操作简单,易于保养维护。装箱装置的形式主要有卧式、垂直下落式、夹持式、裹包式和托盘成型自动、半自动装箱装置,其传动和控制主要由机械、气动、广电一体化为主。
随着经济的发展,单纯靠人工装箱已经满足不了高速生产的需要,因此装箱装置就伴随着时代的发展需要而诞生然后不断地完善,装箱装置既能满足生产的快速性,稳定性,同时还能满足整个生产过程的协调性,提高工作效率
2. 研究的基本内容与方案
2.1 本课题研究的基本内容
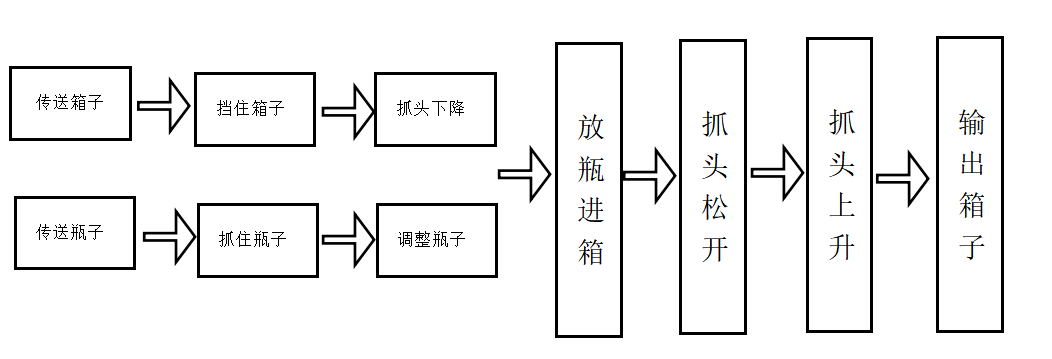
瓶装调味品在在经过一系列的工艺过程完成装瓶之后,就要经过传送装置传送到装箱装置,而本次设计初步采用的设计目标是带传动,带传动到指定的目标位置然后停下,在此同时传送箱子的传送装置同时进行将箱子传送到指定位置停下,控制手抓机构下降抓住瓶子后上升,之后整个手抓装置水平移动到指定箱子的正上方下降后松开瓶子,最后手抓装置复位,箱子输出。实现一次装箱。
2.1.1装箱装置的工艺过程:
2.2本课题研究的目标:
设计合适的齿轮机构、凸轮机构、链条机构、丝杠机构,以实现所需工位的动作,满足以下生产要求:抓头机构可实现12瓶/次,抓头机构在两个方向上实现运动,额定生产能力为8640瓶/h。
2.3本课题拟采用的技术方案及措施
对这些装置的要求以及采用的实现措施如表1:
表 1 需设计装置及其技术方案
| 装置 | 设计要求 | 实现措施 |
| 传送瓶子装置 | 传动平稳,降低噪声,传动比精确,安全可靠 | 电机采用变频调速,经由皮带、蜗轮蜗杆减速机将动力传给主传动齿轮。主传动齿轮经由各级齿轮传动,由传送带将瓶子送达指定位置。 |
| 抓头装置 | 抓住平稳,效率高 | 采用气动控制,通过气缸的伸缩实现抓头的张合。 |
| 抓头平移装置 | 可实现在x、y、z方向的自由运动 | 通过丝杠传动的原理,由电机带动丝杠旋转,进而实现抓头在x、y、z方向上移动。 |
| 传送箱子装置 | 传递平稳,速度快 | 电机采用变频调速,经由皮带、蜗轮蜗杆减速机将动力传给主传动齿轮。主传动齿轮经由各级齿轮传动,由传送带将箱子送达指定位置。 |
主要设计步骤:
(1)抓头机构运动方向的确定以及运动轨迹的确定
(2)传送带主转动轴与电机转速比、传动齿轮设计
(3)设计计算抓头的结构、夹紧力、驱动力、张角
(4)气缸的选择:通过缸径和行程进行选择
(5)功率的计算:包括转矩的计算,功率的计算,电机、减速机的选择
(6)丝杠的选择:材质的选择、螺纹的选择、长度以及直径的设计,传动寿命计算
3. 研究计划与安排
第1-3周:开题报告的撰写
第4-5周:抓头机构运动方向的确定以及运动轨迹的确定,传送带主转动轴与电机转速比、传动齿轮设计
第6-7周:抓头的机构设计、夹紧力、驱动力、张角确定,气缸的选择计算;
4. 参考文献(12篇以上)
[1]王妮,赵美宁,孙莎莎. 全自动装箱机抓瓶机构的优化设计[j]. 包装工程,2010,31(23):32—34.
[2] 邹文生,刘晔,朱景环. 全自动装箱机的研制(四)[j]. 南昌大学学报(理工科),1999(23):179—181.
[3]黄玉美,王润孝,梅雪松. 机械制造装备设计[m]. 北京:高等教育出版社,2006.



