轮式爬升机器人:建模与控制外文翻译资料
2021-12-19 21:59:31
英语原文共 32 页
轮式爬升机器人:建模与控制
摘要:本文研究了一种新型非完整轮式爬杆机器人的运动学建模与控制问题。该机器人属于一种具有挑战性且研究较少的轮式移动机器人,车轮相对位置变化复杂,且受约束的机器人在封闭的几何表面上移动。该问题是用的运动学模型机器人,它是由车轮对运动施加的非完整约束导出的。该模型是一个输入为线性的欠驱动无漂移非线性状态空间(控制系统)。通过对该非线性系统的可控性分析,证明了复杂机动的可行性。结果表明,机器人的三个方向不能独立控制,因此,介绍了三种基本运动作为运动控制策略和稳定控制器的基本要素是为了创造那些基本的动作而设计的。仿真和实验结果表明了该控制系统的实用性。
Koninklijke Brill NV,莱顿和日本机器人学会,2010年
关键词:攀爬机器人,轮式机器人,非完整系统,运动规划
1.介绍
在过去的10年里,攀爬机器人吸引了许多研究人员,因为它们在工业和危险环境中的应用吸引了工业界。电厂垂直、倾斜管道的检验[1-3],复杂金属结构的检验[4-8],以及船体和油箱等表面的维护和检验[9-11]是这类应用的一些著名例子。爬上机器人的另一项重要任务是维护高速公路上的电线杆[12-15]。
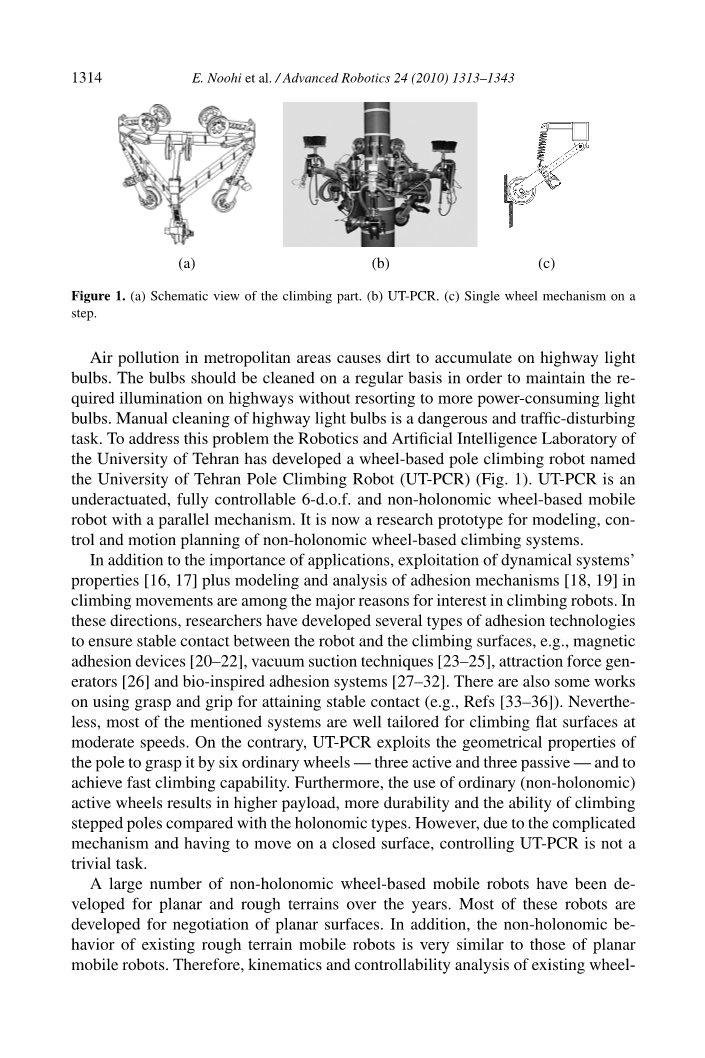
图1:(a)攀登部分示意图。(b) UT-PCR (c) 单轮机构
大城市的空气污染导致公路上的灯泡堆积灰尘,应定期清洁灯泡,以保持高速公路上所需的照明,而无须使用耗电量较大的电灯灯泡。公路灯泡的人工清洁是一项危险的、干扰交通的工作,为了解决这一问题,德黑兰大学机器人与人工智能实验室开发了一种轮式爬杆机器人,名为德黑兰大学爬杆机器人(UT-PCR)(图1)。UT-PCR是一个欠驱动,完全可控6自由度。和非完整的车轮移动具有平行机构的机器人。目前已成为非完整轮爬升系统建模、控制和运动规划的研究样机。
除了应用的重要性,动力系统的开发结合粘附机理的建模与分析[18,19]攀爬运动是人们对攀爬机器人感兴趣的主要原因之一。在这些方向上,研究人员开发了几种类型的粘附技术确保机器人与爬升表面(如磁性表面)稳定接触吸附装置[20-22]、真空吸引技术[23-25]、引力发生器[26]和仿生吸附系统[27-32]。也有一些产品关于使用握把和握把获得稳定接触(如参考文献[33-36])。尽管如此,大多数提到的系统是为了用缓慢的速度攀登平坦的表面。相反,UT-PCR利用了这根杆子,用六个普通的轮子抓住它——三个主动的,三个被动的——然后转动,具备快速爬升能力。此外,阶跃极点与全基因组类型的比较,使用普通(非完整)主动轮的有效载荷更高,耐久性更强,爬坡能力更强。但是,由于复杂机制和必须在一个封闭的表面上移动,控制UT-PCR不是一项琐碎的任务。
近年来,针对平面和粗糙地形开发了大量的非完整轮式移动机器人。这些机器人大多数是为顺利通过平面而开发的。此外,现有的粗糙地形移动机器人的非完整行为与平面移动机器人非常相似。因此,现有轮式移动机器人的运动学和可控性分析比一般情况要简单。分析和控制每一个非完整系统是一个有趣的,并且在很多领域有研究工作,尽管现有的研究对可能的解决方案提供了一些见解,但对于非完整系统并没有通用的解决方案。此外, 特殊的机制, 一方面, 曲面的形状,加强圆柱杆, 另一方面,使UT-PCR的分析和控制更具挑战性。这一挑战存在于一个普遍且研究较少的基于轮子的移动机器人的研究中,其中轮子的相对位置发生变化这是一种复杂的运动方式,机器人只能在一个封闭的几何图形表面上运动。
因此,在本文中,我们开发了一个运动学模型和一组控制UT-PCR的方法。这项工作是对之前关于UT-PCR的部分研究的延续和补充[12,14,38,39]。在这里,我们主要关心的是与开发数学健全的控制器(如李亚普诺夫)和机器人的标准路径。本文的其余部分结论如下。机器人和相关问题在第2节中介绍。状态变量在第3节中介绍,以及在构型和速度空间上的UT-PCR的运动学模型开发。此外, 得到了非完整约束条件和完整约束条件,并对机器人的可控性进行了检验。第四节讨论了UT-PCR的运动控制和运动规划。在MATLAB环境下对所提出的方法进行了仿真分析,其中一种方法在第5节的实际实现中得到了验证。第6节给出了进一步的讨论和结论。
2. UT-PCR和问题陈述
UT-PCR(图1b)是一种欠驱动非完整轮式爬杆机器人。这个机器人是在德黑兰大学人工智能和机器人实验室设计和制造的,它的主要任务是爬上公路灯柱,清洁路灯。该机器人由一个攀爬部分和两个3自由度组成。爬升部分(图1a),以后称为“机器人”, 由一个三角形的身体和六个由普通轮子终止的肢体组成。所有的六条腿都通过1-d.o.f.与身体相连。转动关节(图1c),在机器人身体另一侧的等分面上移动,如图所示。上面的三个轮子是不动的,这是为了进一步稳定机器人,下面的三个轮子被驱动。每一个都从一端连接到四肢,从另一端连接到身体,让轮子与杆子保持接触。将机器人安装在杆子上,机器人的三角形身体被打开,机器人被安装好,然后身体围绕杆子闭合。关于它的设计, 相比现有的爬杆机器人[12],UT-PCR有很多优势:它的重量是通过非完整和欠驱动减少的,这给了它充分的可操作性与较少的驱动器。与现有的爬杆机器人相比,它是一种移动速度很快的机器人,因为它可以用轮子抓取和爬杆。由于它的自动锁定功能和杆总是通过机器人平台的事实,它是安全的,自动锁定功能是由于自动刹车和特殊安排,驱动车轮。由于弹簧悬吊,可攀爬圆形或接近圆形截面的阶梯杆。它可以攀爬有色金属和有色金属的极点,因为它不依赖于磁力抓住表面。
结果综述了自然攀爬和人工攀爬的机理,详细介绍了UT-PCR的设计。
理论上,在磁极上上下移动很简单,只要机器人处于水平构型,且机器人的体心在极轴上,则可以通过给予相同的轮速来实现。然而,如果身体中心偏离极轴或机器人是倾斜的,机器人的控制不再那么容易了。由于机器人的非完整特性,加上对非完整运动规划的一些实际考虑和要求,对控制策略的要求更高。实际考虑包括机器人安装在杆上的误差,车轮控制器的缺陷,机器人模型中的车轮滑移和误差。
我们的目标是为UT-PCR计划一条从任意初始配置到最终状态的路径,并沿着该路径进行控制。考虑到机器人的任务,机器人应将手臂放在适当的位置下。这意味着在最终状态下,机器人除了要处于指定的高度和确定的绕极点的旋转角度外,还需要将其身体的几何中心水平放置在极点轴上。因此,控制器应该能够使机器人在极上移动时,除了在XYZ方向上移动其几何中心外,还能绕三个笛卡尔轴旋转。
当机器人水平时,轮子只能沿着与极轴平行的路径移动。因此,机器人不能绕杆子旋转,也不能在杆子的垂直平面上移动,只能爬上杆子。但是,如果车轮与极轴成一个角度,这意味着机器人是倾斜的,车轮上的任何运动都能使机器人绕着磁极旋转,并在垂直于磁极轴的平面上运动。考虑到车轮的路径,很明显,这种运动会导致机器人倾角的变化。换句话说,绕极点的旋转,垂直于磁极和沿磁极的倾角和运动是成双的。它使机器人在理想路径上的控制具有挑战性和理论上的趣味性。
3. 运动学建模
在本节中, 对其进行了完整的运动学分析。这个分析从推导独立状态变量开始,表示机器人的自由度,并在构型空间中进行运动学建模。然后根据选取的状态变量提取速度空间方程,测试了机器人的可控性。除了非全息约束和机器人工作空间,提取机器人行为中存在的其他约束条件。
3.1假设和定义
3.1.1假设
在推导方程和运动学模型时,为了减少模型的复杂性,同时基于问题的基础,对模型进行了一些假设和简化。考虑到机器人的要素,我们从去掉上面的三个轮子开始简化。这些轮子的设计是为了使机器人在爬杆时更容易稳定另外,由于这些轮子不活动,下一代的车轮将被完整的车轮所取代。因此,它们不影响机器人的运动控制。此外,我们假设弹簧足够强,以足够大的接触力使主动轮与杆接触。此外,假设摩擦系数足够大,以防止任何车轮打滑。当机器人停止时,电机力矩处于预定的边界内。
每个轮子都是由位于其相应的边缘顶端的圆盘来建模的,由于车轮的半径远小于四肢的长度和杆子的半径(图1),圆盘的半径被忽略了。换句话说,车轮被认为是极点表面的接触点,与机器人身体的各个角落之间的距离是恒定的。值得一提的是,虽然车轮被认为是点,这些点具有车轮的非完整特征。图2为基于上述假设的机器人简化模型。在图2中,极点轴被认为与参考坐标系的z轴平行。在本文的其余部分中,{F}将该框架称为固定参考框架。
3.1.2 定义
我们使用术语“状态空间”和“速度空间”来表示构象空间变量的推导。它们不涉及系统的动态模型。在运动学模型中(图2),轮,实际上是模型中的接触点,通过肢体i(段)连接到角点上。机器人的主体是,这些边分别是 和。四肢与身体的角度来标示和钢管的半径称为r。机器人侧边的长度等于b。四肢长度相等,用l表示,如图3所示。
图2 简化的机器人模型
图3 定义机器人的框架
三角体的几何中心用O表示。它也可以作为方程的下标,当提到这一点。图3显示了机器人框架的定义。该框架放置在机器人的三角体上,其x轴通过角C1, z轴垂直于机器人的三角平面。原点位于O上,相关坐标系在方程中称为{R}。还应该注意的是肢体i通过关节i与身体相连,这是一个1-自由度。因此,肢体i在包含{R} z轴的平面上旋转,由于机器人的身体是等边三角形,段, 和是正交的。因此,该转动轴与.垂直,表示旋转轴联合i为 (图4),我们有:
如图4所示,接触点只能在旋转平面上移动,总是垂直于。同时,车轮应不断地与杆接触,这意味着:
(2)
图4旋转平面
其中和为接触点在{F}中的位置的x和y元素。
3.2配置空间模型
为了得到状态空间方程,首先应该定义一组适当的状态变量。在本节中,我们通过对{R}到{F}进行齐次变换,机器人完全可以在构型空间中定义。考虑的位置和方向对{F} {R}是用位移矢量和旋转矢量分别。基于齐次变换,机器人转角位置,{F}中的车轮和O为:
- 代表对应的旋转矩阵的等效旋转矢量,和是机器人的转角和车轮在坐标系{R}中的位置。我们可以对而言, 通过了解的瞬时值我们可以计算出所有的配置空间变量。可显示为以下:
(4)
图5机器人的可能配置与解决方案的数量有关
其中可以用表示,运用(4),我们可以将扩大:
(5)
其中是用表示的,由于本身是,(5)可以改写为0,它指出可以基于计算。
然后,根据(3)可以找到车轮和转角的位置。因此,集合(O在{F}中的位置) ({ R }的欧拉角{F})对于系统状态来说是一个很好的选择,因为通过了解它们,机器人是完全定义的。此外,这些变量的测量比那些定义在参考文献[14]要容易得多,从今以后系统状态将被引用。还应该指出,(5)最多导出四个解决方案,因为()中那些真正在0和1之间(图5)。对于拥有多个解的那些相交极点,正的(较低的交点)是可以接受的答案。它保证了线段Ci和与点以外的极点没有交点。
3.3速度空间模型
如前一节所述,我们选择的位置O, i.e., 和{R}的方向, i.e., ,系统表示,由式(6)中的X表示。它们的导数,就是O的线速度,作为T和{R}的角速度,对于{F},在速度空间的状态方程中:
(6)
在下面,所有的计算都在参考坐标系{F}中,除非另有规定。与所有铰接机器人相似,转角Ci和车轮的速度可以表示为(图2):
(7)(8)
如前所述,接触点只能在旋转平面上移动,因此,垂直于平面法向量,. 同时,由于轮子应该始终与杆接触,应属于接触点的极切平面。因此, 位于这两个平面的交点上(图6),可以表示为:
(9)
是一个向量与杆传递车轮接触点的半径,也切平面的法向量,由于车轮被认为具有防滑性能,所以车轮的速度将等于接触点的速度。因此,Vi代表车轮的速度,随着系统的控制输入,和表示运动的方向。由图6中的(7)、(8)、(9)、(1)可知:
(10)(11)
图6滚动圆盘速度的约束条件
重组(10)及(11)的矩阵形式如下:
(12)
其中S(·)为表示叉乘运算的矩阵。使用Mi重命名(12)和(13)中的矩阵,可以重写为:
(13)
因此,非线性速度状态空间方程为UT-PCR提取方法如下:
(15) (16)
由方程(15)和(16), 在任何已知的配置O的线速度和角速度的{ R }可以计算任何输入车轮速度。该状态模型描述了机器人的正运动学,并已用于控制器的设计和仿真。
3.4可控性分析
为了分析机器人的可控性,我们将系统方程(15)和(16)重写为:
其中(i = 1,hellip;,3)表示矩阵的列。式(17)说明机器人为无漂移系统。此外, (12)可以改写为,这意味着机器人约束是普法夫的形式。(12)和(17)都满足周氏定理的条件,给出了可控制性[37]的充分条件。
根据这个定理,控制系统的输入和n个状态变量, 如果可访问秩条件对所有X都成立,那么控制系统是局部可访问的。摘要将周氏定理应用于无漂移系统,为系统的可控性提供了一个充分条件。此外,普法夫运动学约束集非完整的充要条件为秩。如果秩,则存在p minus; m不完整约束和n minus; p完整约束(37)。
n = 6个状态变量(X), m = 3个输入(Vi),三项普法夫约束条件
资料编号:[4373]
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



