基于线阵CCD的非接触式高速位移测量传感器设计毕业论文
2020-02-19 18:59:08
摘 要
对于高速位移的测量,传统的测量手段很难满足测量要求。本文针对这一问题,设计了一款基于线阵CCD的非接触式高速位移测量传感器。该位移传感器的测量原理是激光三角法,比较直射式与斜射式两种激光三角法,分析各自的优劣最终选定直射式作为设计方案。通过建立数学模型,分析系统测量范围、精度与CCD传感器像元数量、像素尺寸之间的关系,分析系统工作距离、分辨率与激光三角三边尺寸的关系,确定系统结构。以FPGA作为系统硬件电路的控制核心,利用其流水线与并行处理的特点对CCD数据进行采集和处理达到高速测量的目标。使用Verilog硬件描述语言,编写程序代码,通过严格的时序约束完成FPGA对CCD传感器和CCD模拟前端AFE的控制,并进行仿真验证。研究数据滤波与激光光斑中心定位,针对本系统的特点选择合适的方法实现激光光斑的亚像素级分割,提升系统的测量精度。本文设计的位移传感器与现有的相关设计和研究相比,具有测量速度快,测量量程大的特点。
关键词:激光三角法;线阵CCD;FPGA
Abstract
For high-speed displacement measurements, traditional measurement methods are difficult to meet measurement requirements. In this paper, a non-contact high-speed displacement measuring sensor based on linear array CCD is designed. The measuring principle of the displacement sensor is the laser triangulation method, which compares the direct laser type and the oblique type laser triangulation method, and analyzes the advantages and disadvantages of each and finally selects the direct type as the design scheme. By establishing a mathematical model, the relationship between the measurement range and accuracy of the system and the number of CCD sensor pixels and pixel size is analyzed. The relationship between the working distance and resolution of the system and the three-dimensional size of the laser triangle is analyzed to determine the system structure. Taking FPGA as the control core of the system hardware circuit, the CCD data is collected and processed by its pipeline and parallel processing to achieve the goal of high-speed measurement. Using Verilog hardware description language, the program code is written, and the control of the CCD sensor and CCD analog front-end AFE is completed by strict timing constraints, and the simulation is verified. Research data filtering and laser spot center positioning, select the appropriate method for the sub-pixel segmentation of laser spot and improve the measurement accuracy of the system. Compared with the existing related design and research, the displacement sensor designed in this paper has the characteristics of fast measuring speed and large measuring range.
Key Words:laser light triangle method;linear-array CCD;FPGA
目录
第一章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 1
1.3 研究的内容 3
第二章 系统原理和方案设计 4
2.1 激光三角法原理 4
2.1.1 斜射式激光三角法 4
2.1.2 直射式激光三角法 5
2.2 结构设计 7
第三章 系统的硬件电路设计 9
3.1 CCD传感器选型与驱动电路设计 9
3.1.1 CCD传感器型号选择 10
3.1.2 CCD的驱动电路设计 10
3.2 CCD信号输出处理方案和电路设计 12
3.2.1 CCD的输出特性 12
3.2.2 CCD信号输出处理方案设计 14
3.2.3 CCD信号输出处理电路设计 16
3.3 FPGA芯片选型与外围电路设计 17
3.3.1 FPGA芯片选型 17
3.3.2 FPGA外围电路设计 18
3.4 电源供电网络设计 20
3.4.1 电源需求 20
3.4.2芯片选择与电路设计 20
3.5 高速串口电路设计 21
3.6 硬件成本核算 22
第四章 FPGA程序设计 23
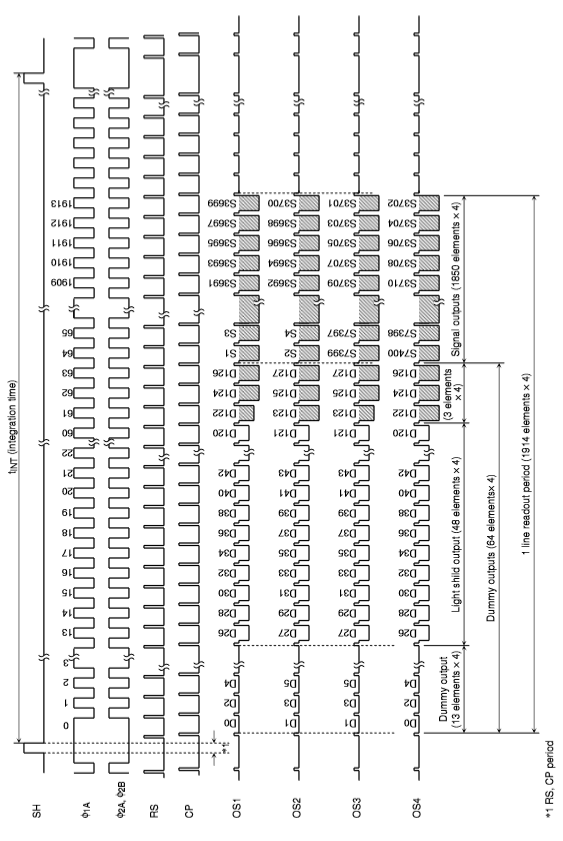
4.1 CCD驱动时序设计 23
4.2 AD9978驱动时序设计 24
4.3 LVDS数据接收和拼接 28
4.4 CCD上的激光光斑定位 29
4.4.1 数据滤波 29
4.4.2 光斑中心定位 30
第五章 全文总结 31
参考文献 32
附录A 程序代码 33
附A1 CCD驱动时序程序 33
附A2 AD9978驱动时序程序 36
致谢 39
第一章 绪论
1.1 研究目的及意义
随着科技的不断进步,制造业的工艺技术不断提高,检测行业对于检测手段也提出了越来越高的要求。高精确、高灵敏度、高速度、非接触式和便携化成为检测行业当前发展的趋势。传统的接触式测量方法存在许多问题,例如测量工具与被测物体接触会产生一定的接触压力,测量接头会产生变形产生横向分辨率的问题,这就影响测量精度,测量的速度也受到了限制。另外接触式测量对被测物体表面会造成一定的损伤,而且也会磨损接触测头,需要定期更换这样会增加测量成本。高精度数控机床在线尺寸测量和高频的机械振动等都是传统接触测量所不能完成的,由此可见无损非接触测量必不可少。非接触式测量的方法有很多,如超声波检测技术、射线检测技术、光电检测技术等。非接触式激光三角测距作为光电检测技术,具有检测速度快、测量频率高、测量精度高、结构简单、灵活和方便使用等优点,而超声测距、射线测量等方式存在精度差、抗干扰差、测量频率低等缺点,因此激光三角测距技术在工业中有着更加广泛的应用。
现代光电技术的高速发展,对三角测距技术起到极大的推动作用,CCD、CMOS和PCD 等光电感受器件发展十分迅速。像素尺寸达到微米级集成度非常高,帧扫描频率可达到几十K,完全可以满足高速和高精度的测量要求。把传统的三角法测距与激光结合起来,利用CCD感光进行被测目标物距离信息感知的研究越来越多。例如Keyence公司将高速激光位移传感器用于流水线产品状态检测,通过测量流水线产品的高度起伏进而判断产品有无。该传感器就是利用了CCD的像素元尺寸小,扫描速率快的特点,实现高速高精度检测。
1.2 国内外研究现状
国内外针对激光三角测距的研究主要集中在两个方面:(1)用激光位移传感器去感知周围环境,实现地形地貌的测量;(2)提高激光三角测距的精度、量程等。
在提升传感器精度方面国外有很大研究成果,比较突出的公司有Keyence公司、ZSY公司和Micro-Epsilon公司等。日本公司Keyence在这方面的研究开始的很早,技术比较成熟,国内外市面有很多该公司的产品,在中国该公司也有很大的市场。LK_G3000系列高精度、高速CCD激光位移传感器的采样速率50KHz,精确度 ,重复精度0.01µm。
,重复精度0.01µm。
而国内在这方面的研究起步较晚,徐航基于线阵CCD设计了一款非接触式轴类直径测量仪,测量范围在0.5-50mm,测量精度在±8μm[[1]],吴东兴设计的直径测量系统,理论上可以测量0.1-0.3mm范围内的细丝,误差能在0.4%以内[[2]]。这些设计都只是停留在了实验室阶段,并没有投入实际生产。实际投入应用的产品,如大恒科技生产的1320系列激光位移传感器的采样速率32KHz,分辨率0.4µm,非线性误差0.05%。
从上面列出来的例子我们可以看出,国内对于激光位移传感器的研究相较于国外还存在一定的差距,国产的传感器在精度和测量速度上还有很大的提升空间。针对这个现象,国内的一些高校加大了对激光测距这方面的研究,针对测距系统的光学结构、硬件电路和软件算法等多方面深入研究,提出了许多改良方案。
进行系统的光学结构设计时,由于激光三角法测量原理的限制,量程较大时,一般测量精度较低。针对这一问题,杭州电子科技大学的陈建华提出了一种变量程测量方法。该方法通过三棱镜的组合来偏置传感器外围的测量光路,实现传感器量程的扩大[[3]]。
激光位移传感器是基于激光光斑的位置来计算位移的,激光光斑的质量直接影响到测量精度。天津大学的丁小昆在他的文章中提到半导体激光器功率越大时,系统测量误差越大,激光器的稳定性和发热功率对测量影响较大。这两个因素对系统带来的直接影响是光斑质量的变化,包括高频噪声和光斑整体偏移。为了解决这些问题,他使用空间低通滤波器来抑制高频噪声,使用双光束补偿来抑制光斑整体偏移[[4]]。经过仿真,该方案有着良好的效果,提高了测量精度和实用性。
激光三角法测距时,不同的测量环境与被测物体需要的最适宜激光强度也不一样。上海交通大学的聂晨晨在他的设计中采用光强反馈控制方法设计了专门的激光器驱动电路,用一个光电二极管检测激光器光强,FPGA接收二极管的反馈,以此来调节激光的光强[[5]]。齐奎州在他的论文中也提到了类似的恒定光强控制电路,只是采用的控制器件不一样,他选择用APC驱动[[6]]。华中科技大学的褚俊在他的文中提出了新的光强度模糊自适应控制方法,智能控制激光功率、光积分时间以及CCD放大增益来调节系统光强度,达到最合适光强度[[7]]。上述提到的方法都是用于高精度测量,当系统的精度要求较低的时候,也可以不设计光强控制电路。
系统的硬件电路设计有比较多的选择,可以使用单片机、FPGA、STM32、CPLD等作为系统的主控芯片,控制感光器件采样,采样的数据经过模数转换传输到主控芯片中进行数据处理或传输到上位机再做处理。方法多种多样,得根据系统的要求来做出硬件设计。靳硕设计的系统把FPGA作为主控芯片,同时引入单片机协调处理[[8]];陈骥选择用CPLD驱动CCD,数据处理用DSP器件完成[[9]];朱柏树则把STM32作为主控芯片[[10]]。
为了提高系统的精度,要对感光器件上的光斑中心精确定位。为了解决这个问题,很多人在软件算法进行了研究,实现了像元的亚像素级分割。再将数据进行光斑中心定位计算之前通常会进行数据滤波,减少噪声对光斑中心的影响。姚秋红在分析了三种数据滤波方法,中值滤波、 滑动平均滤波和ADWA滤波算法(加权滑动平均滤波算法),选择使用平均滤波[[11]],而孙军利用了均值滤波和中值滤波两种方法。选择不同的滤波方法是因为不同系统的噪声种类有差别,特定的滤波方法对于特定的噪声有较好的滤除效果。完成数据滤波后,就可以进行光斑中心定位,常用的定位方法有灰度质心法、二值化处理法和插值法。在这几种基础方法上,李杰强提出了平方加权质心法,该方法采用灰度值的平方作为权值,与普通的灰度质心法相比提高了离光斑中心近的点的影响,这样可以有效消除边缘白噪声的影响[[12]]。
1.3 研究的内容
本论文设计了以激光三角法为测量原理,基于FPGA的线阵CCD驱动和数据处理,实现量程为1m,测量精度为0.39mm的位移测量系统。
具体的研究内容包括:
(1)经过比较直射式激光三角法与斜射式激光三角法的原理,确定设计的位移测量系统采用直射式。分析系统的测量范围和精度与激光三角三边的尺寸的关系,确定系统的结构;
(2)针对系统高速、高精度的要求,查阅资料,提出线阵CCD的选型方案,数据快速采集处理的方案,FPGA的选型方案,完成系统的硬件电路设计;
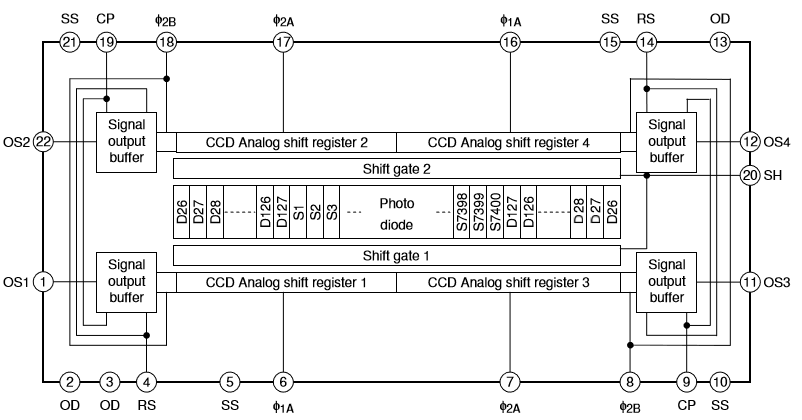
(3)深入理解CCD传感器和CCD模拟前端AFE的工作过程,设计CCD的驱动时序和模拟前端AFE的驱动时序;
(4)研究如何对一帧数据进行滤波、求质心等亚像素分割方法操作,如何有效利用FPGA的并行与流水线处理特性达到快速高精度数据处理的目标。
第二章 系统原理和方案设计
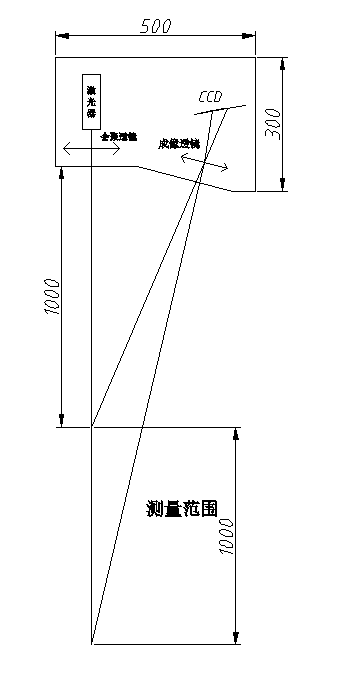
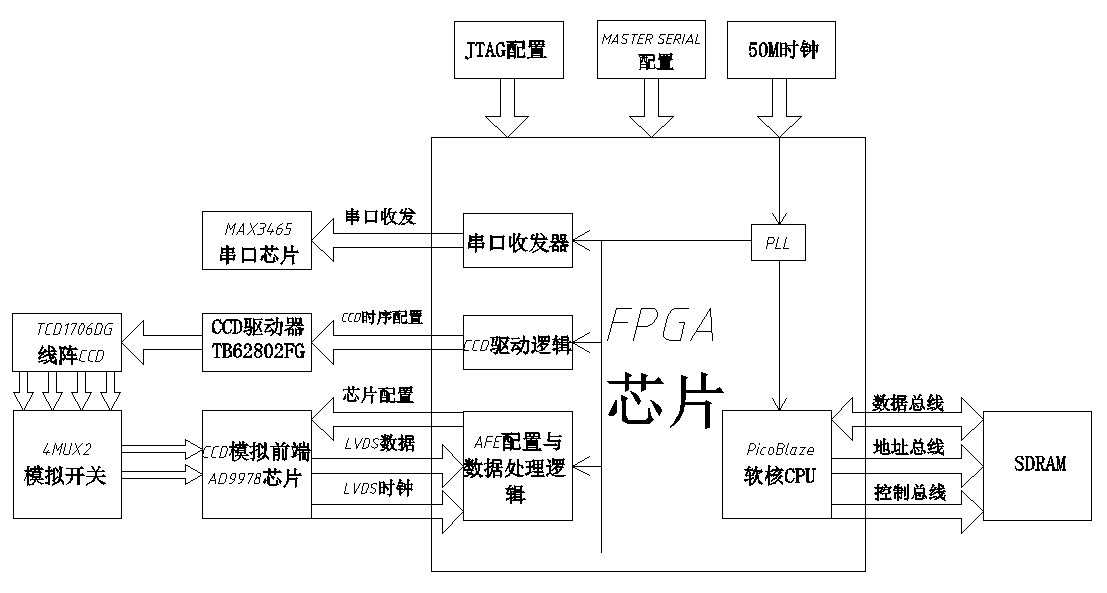
激光三角法测量位移系统的设计包括结构设计、硬件电路设计、软件调试。结构设计是整个系统的根本,对于系统的量程和精度有着很大的影响。系统的整体原理结构如图2.1所示。激光管发出的激光通过透镜在被测物体上形成一个光斑,被测物体上的光斑经过成像透镜在感光器件CCD上也会形成一个光斑。当被测物体发生移动时,CCD上的光斑也会发生移动,使不同区域的像元感光。通过检测两次感光像元的位置差,就可以通过光路关系反推出被测物体的移动量。FPGA是整个系统的主控芯片,由FPGA控制CCD采样,接收CCD输出的数据,并将数据进一步的处理,确定光斑的实际中心位置。在完成数据处理后,FPGA通过UART串口将数据发送到PC端。本次设计的系统,上位机只进行数据存储和显示,并不会实质上参与数据处理。
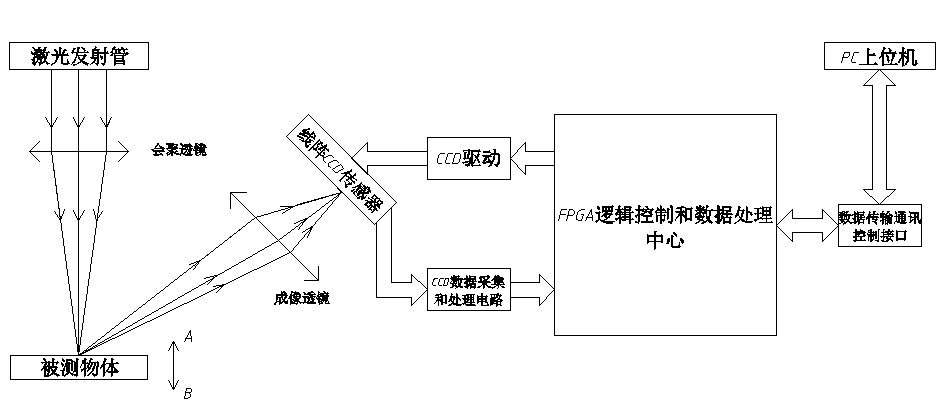
图2.1 系统整体原理结构图
2.1 激光三角法原理
按照入射激光光束与被测物体的法线之间的夹角,激光三角法可以分为直射式激光三角法和斜射式激光三角法。这两种方法有着各自的特点,针对不同测量条件和要求应该选择不同的测量方法。下面将分别介绍这两种方法。
2.1.1 斜射式激光三角法
当入射激光的光束与被测物体表面的法线呈现一定角度时,就称为斜射式激光三角法。其原理如图2.2所示,该系统由激光器、会聚透镜、成像透镜和感光器件等组成。
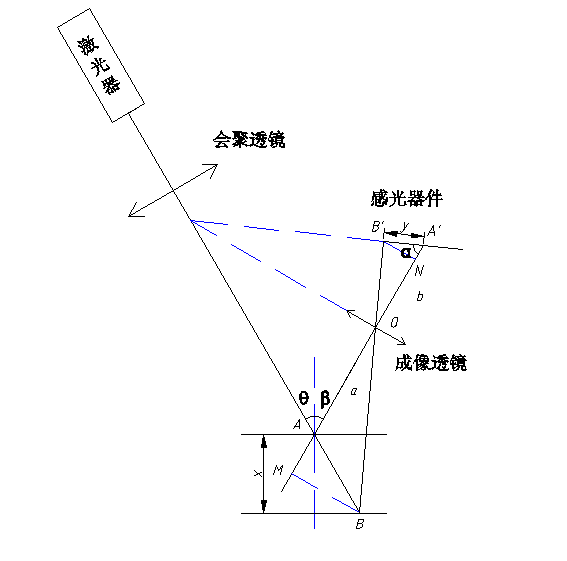
图2.2 斜射式激光三角法
建立斜射式激光三角法的数学模型,设成像透镜的焦距为f,过B和做的垂线,垂足分别为M、N。的长度为a,的长度为b。由相似三角形△和△的几何关系知:
将代入2.1得:
又有,代入式2.2并化简得:
2.1.2 直射式激光三角法
当入射激光的光束与被测物体的法线平行时,就称为直射式激光三角法。其原理如图2.3所示。
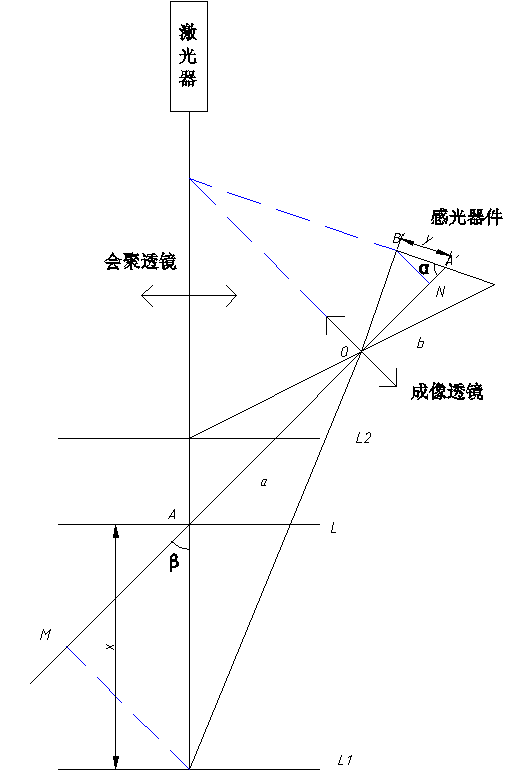
图2.3 直射式激光三角法
令公式2.3中的,就能得到直射式激光三角法的公式:
为使测量范围内的激光光斑都能在感光器件上呈现聚焦的像,直射式与斜射式的实际光路均需要满足Scheimpflug条件,如式2.5所示,即此时感光器件受光表面、成像透镜光轴法线和出射激光相交于同一点。
斜射式与直射式激光三角法都可以用来进行非接触式高精度、高速度位移测量,两者的差别主要存在以下几个方面:
(1)从几何算法推导出来的数学公式上来看,直射式的公式更加简单,误差也更小。
(2)从系统的体积上来看,折射式的系统体积可以做得比斜射式更小,更加方便携带。
(3)从系统的分辨率来看,斜射式的分辨率更高,适用于对精度要求更高的测量系统。
(4)使用斜射式激光三角法时,当被测物体发生位移,物体上的光斑会照在不同的位置,即无法知道某确定一点的位移情况,而直射式不同,光斑和位置是一一对应的,在标定上更加方便。
2.2 结构设计
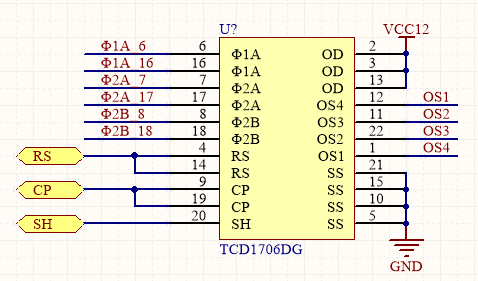
通过上述两种方法的比较与讨论,考虑到系统的体积与标定问题,本次设计选用直射式激光三角法。对于本系统来说,未定参数很多,各个参数之间相互牵制,对于系统影响很大。其中CCD的感光长度与像元数量直接影响系统的量程与分辨率。由后文可知本次设计选用的是东芝公司的TCD1706DG线阵CCD,感光长度34.8mm,包括7400个有效像素单元。设平面为基准面,平面为系统测量的最远点,为最近点。则被测物体在基准平面处成像在CCD感光区的中心,基准平面L到的距离称为测量远场,到的距离称为测量近场,近场和远场成像各占CCD感光区的一半。对公式2.4求导,得到系统的灵敏度:
从公式(6)可以看出系统的灵敏度与x有关,由于测量近场的距离比测量远场的小,则测量近场灵敏度相对高,而远场的灵敏度相对低一些。
本系统设计的测量范围是1m,这个距离远远大于CCD感光区的长度,所以被测物体呈现的是一个缩小的像。由成像规律知,物方截距大于成像透镜的两倍焦距,像方截距在一倍焦距和两倍焦距之间,这个有助于成像透镜的选择。期望的量程为1m,考虑到测量时最远处与最近处的点成像在CCD的边缘,测量的误差会较大,可以把系统的实际量程设计的更大一些,我设为1.2m。
光学系统的工作角度直接影响了系统的体积,工作角度越大则系统体积越大,超过一定限度后会影响正常测量;工作角度越小则系统体积越小,但是角度过小,会严重影响系统的测量精度[[13]]。应该综合考虑系统体积与精度,选择一个较合适的值,本系统设为。考虑到系统的体积,将成像透镜与CCD的距离b=150mm。将 、代入公式2.4和公式2.5。令,计算远场测量范围和近场测量范围。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: